7.2 myCobot 320-自适应夹爪
产品安装教程
第一步:
将夹爪连接线插口插在机械臂末端测边接口上。
第二步:
通过螺丝嵌入连接机械臂末端接口即可将夹爪固定住。
技巧 可以在夹爪指尖粘贴橡胶,以获得更好的摩擦力。
注意事项
- 请确保产品已经按照说明连接成功
- 请确保产品供电为附带适配器供电
- 请确保电源适配器能正常工作
Arduino 环境下使用夹爪
- 说明
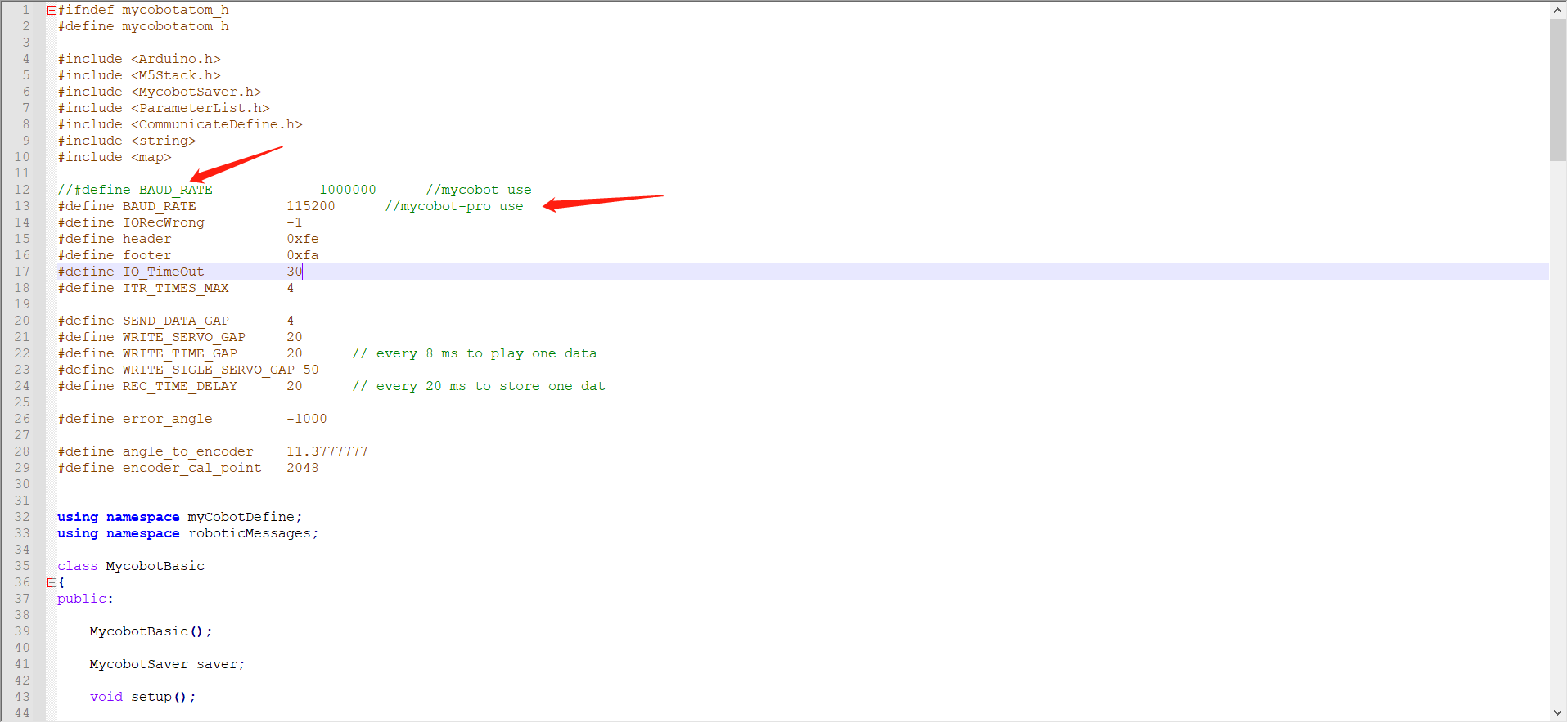
- mycobot和mycobotpro自适应夹爪程序通用,但需要修改 [ MycobotBasic.h ] 的库,如下图所示,注释掉mycobot的。
- 新建一个Arduino程序,内容如下:
// 此文件用于mycobotpro设备控制末端夹爪运动,对应烧录设备为Basic
// 烧录前请将夹爪张开至最大角度
//导入相关库:
#include <MycobotBasic.h>
#include <ParameterList.h>
//实例化函数:
MycobotBasic myCobot;
//初始化函数:
//编写setup函数,只在设备打开时执行一次setup函数:
void setup() {
myCobot.setup();
delay(10);
myCobot.powerOn();
delay(10);
myCobot.setGripperIni(); //设定夹爪当前位置电位值为2048
delay(20);
Serial.begin(9600);
}
//主体函数
//编写loop函数,程序循环执行loop函数:
void loop() {
myCobot.setEncoder(7,2048); //设定末端夹爪打开至2048电位值
delay(2000);
Serial.println(myCobot.getGripperValue()); //读取末端夹爪电位值
delay(50);
myCobot.setEncoder(7,1700); //设定末端夹爪打开至1700电位值
delay(2000);
Serial.println(myCobot.getGripperValue()); //读取末端夹爪电位值
delay(50);
}
Roboflow 环境下使用夹爪
- 与mycobot相同,请自行查看mycobot自适应夹爪的教程。