myAGV-PS4手柄控制
1.连接手柄
1.建立串口和蓝牙协议层的数据连接通道
打开一个控制台终端(快捷键Ctrl+Alt+T),在终端输入以下指令:
sudo hciattach /dev/ttyAMA0 bcm43xx 921600 noflow -
成功标志:
Device setup complete
如果出现timeout再运行一次,直到出现 Device setup complete
2.注册蓝牙控制
在终端输入以下命令,注册蓝牙控制并进入蓝牙控制命令行:
sudo bluetoothctl
3.power on
在终端输入以下命令:
power on
成功标志:
Agent registered
4.discoverable on
在终端输入以下命令:
discoverable on
成功标志:
Changing discoverable on succeeded
5.scan on
在终端输入以下命令:
scan on
成功标志:
Discovery started
6.配对
1.首先长按ps和share键五秒,看到指示灯快速闪烁就可以配对

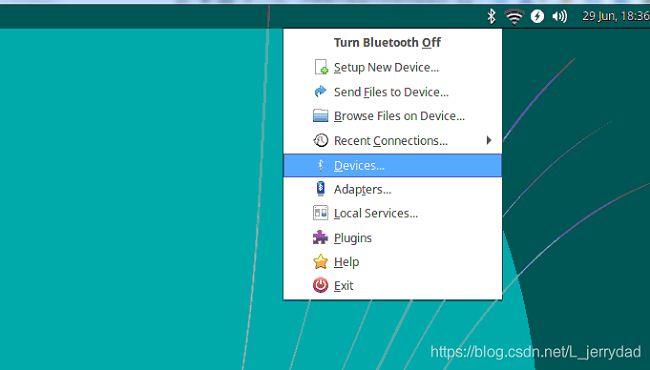
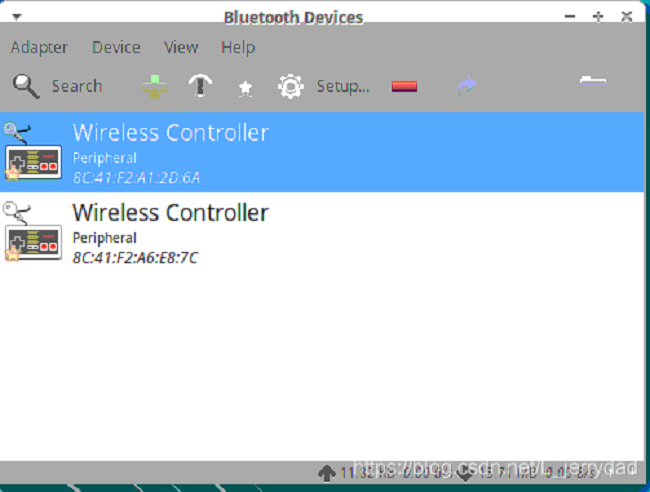
2.在界面中右上角找到蓝牙标志,点击蓝牙->Devices,可以看到遥控手柄的地址,比如我这里的是 8C:41:F2:A1:2D:6A
 3.配对我们的手柄设备,在终端中输入(这里的ADDR是刚才我们读到的地址,实际连接时输入你读到的设备地址):
3.配对我们的手柄设备,在终端中输入(这里的ADDR是刚才我们读到的地址,实际连接时输入你读到的设备地址):
pair 8C:41:F2:A1:2D:6A //这里的ADDR是刚才我们读到的地址,实际连接时输入你读到的设备地址
4.连接我们的手柄设备,在终端中输入((这里的ADDR是刚才我们读到的地址,实际连接时输入你读到的设备地址):
connect 8C:41:F2:A1:2D:6A //这里的ADDR是刚才我们读到的地址,实际连接时输入你读到的设备地址**
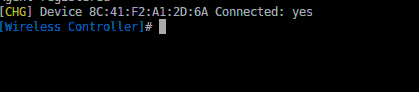
5.可以看到设备连接成功,此时手柄指示灯为蓝色常亮 成功标志:
Connected:yes
2.开启小车的launch文件
打开一个新的控制台终端,在命令行中输入:
roslaunch navigation_demo myagv_navigation.launch
成功标志:
First imu received.

3.开启手柄控制launch文件
打开一个新的控制台终端,在命令行中输入:
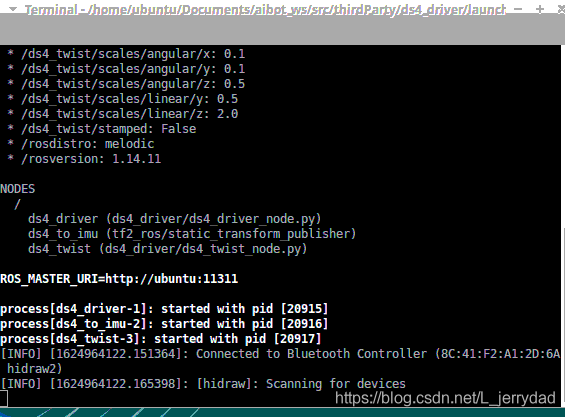
roslaunch ds4_driver ds4_twist.launch
成功标志:Connected to Bluetooth Controller +[ADDR]
如果成功走到这里了,就可以成功用手柄控制小车的行走了,因为手柄没有调速的功能,车速会比较快,所以要小心驾驶。