Introduction to mechanical arm parameters

1 Structural parameters
1.1 Mechanical arm parameters
| index | parameters |
|---|---|
| Name | Elephant ultra mechanical arm |
| Model | ultraArm P340 |
| DOF | 3/4 |
| Positioning Accuracy | ±0.1 mm |
| Payload | 650g |
| Weight | 2.9kg |
| Working radius | 340mm |
| Material | Aluminium alloy,PhotopolymerSLA |
| Power | AC100-240V / 50-60Hz |
| Input power | 12V 5A 60W |
| Output power | 12V 8.4V 5V |
| Motor type | High performance stepper motor |
| TCPMaximum speed | 100mm/s |
| Mechanical control core | Mega2560 |
| Communication mode/connection mode | RS485Communication/USBSerial port line |
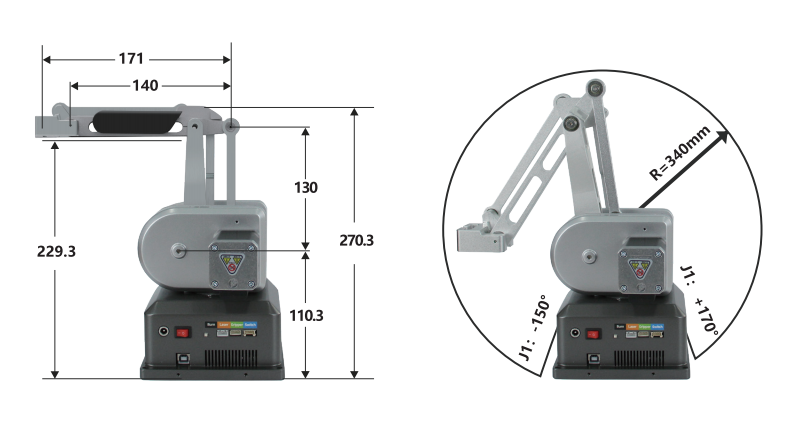
1.2 Working space
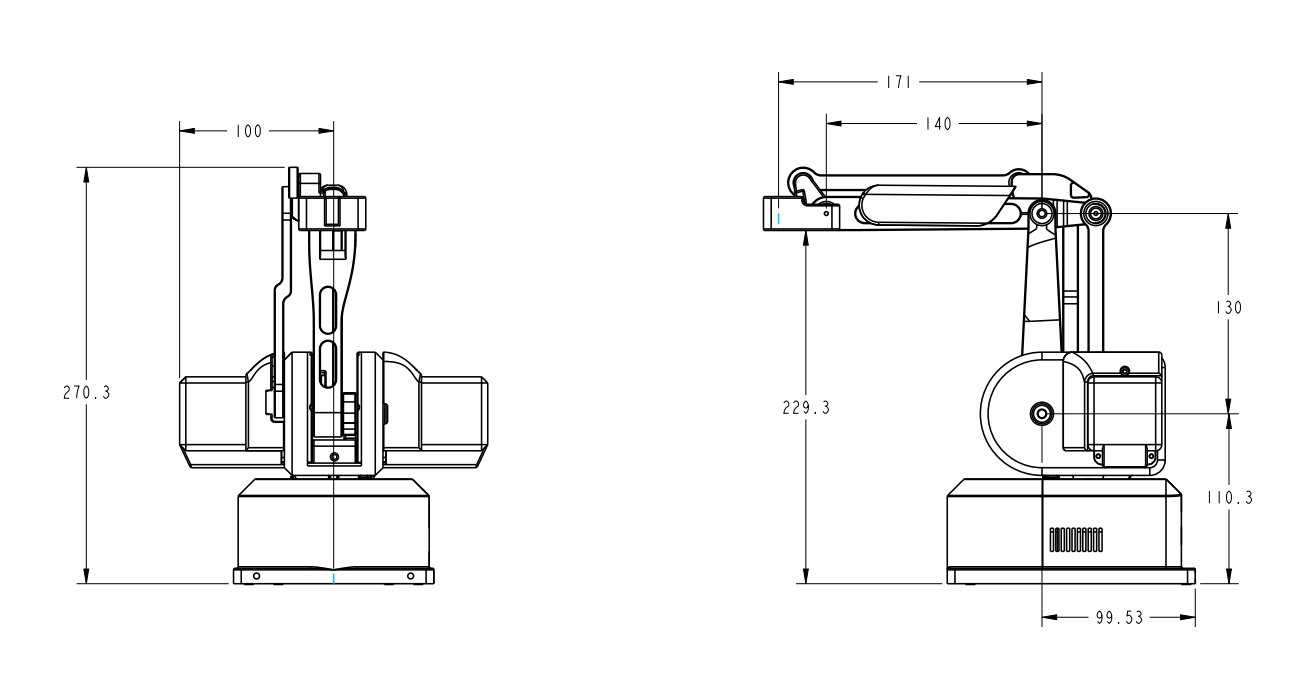
1.3 Specifications and dimensions
1.4 Joint rotation range
| Joint | Range |
|---|---|
| J1 | -150° ~ +170° |
| J2 | -20° ~ +90° |
| J3 | -5° ~ +70° |
| J4(accessory) | unlimited |
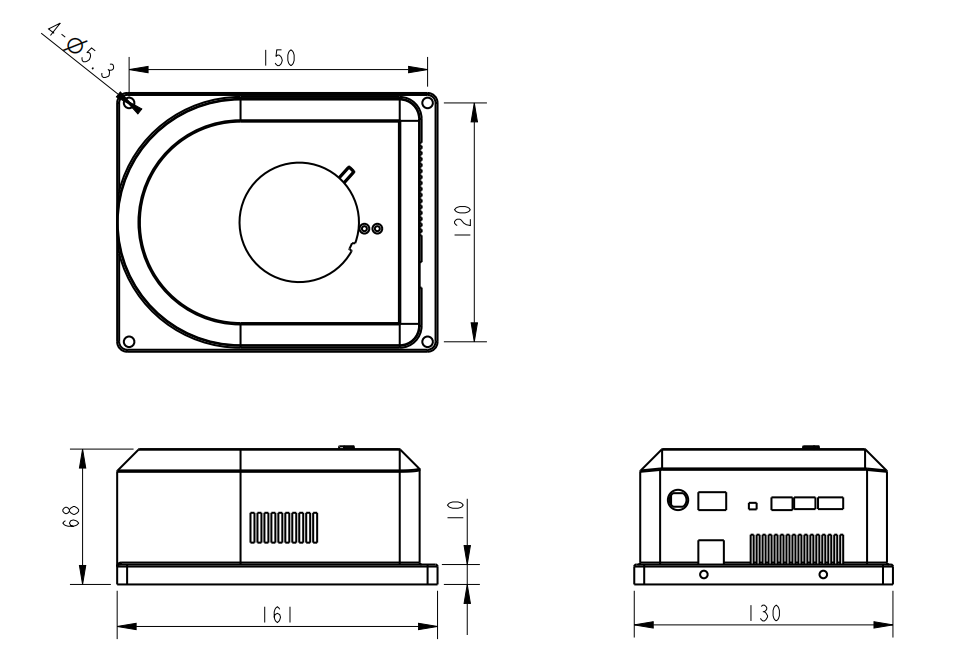
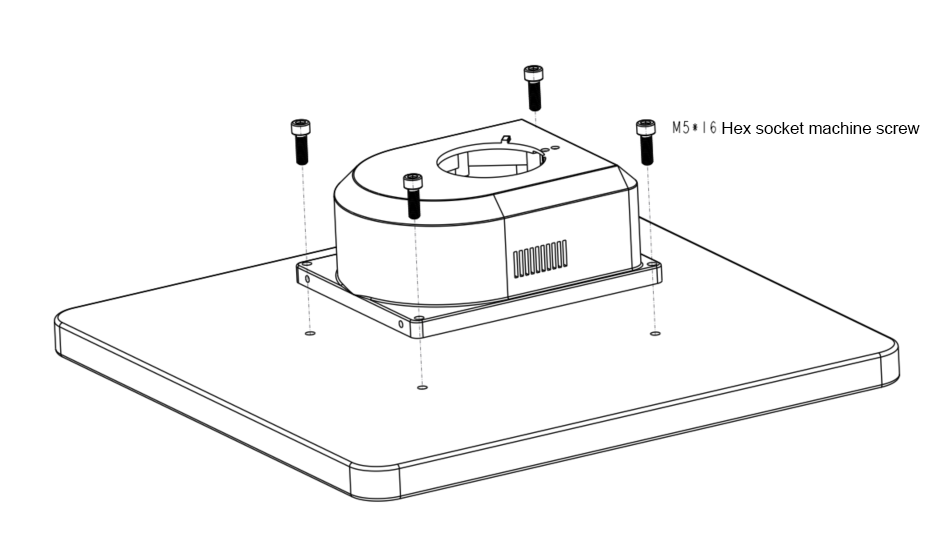
1.5 Hole installation
Robot base installation
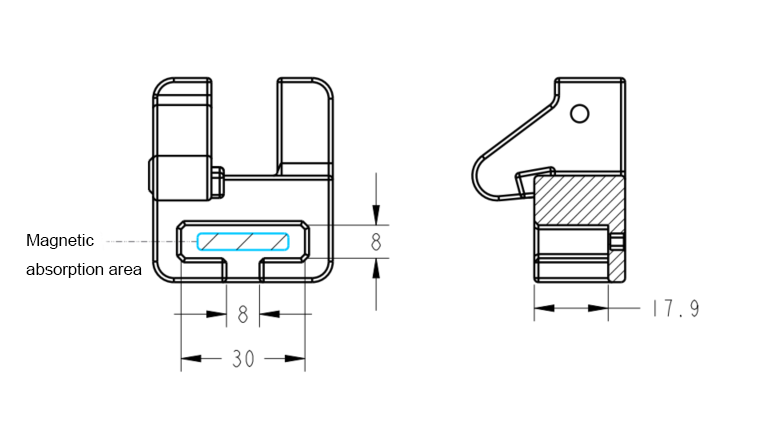
Robot end mounting flange
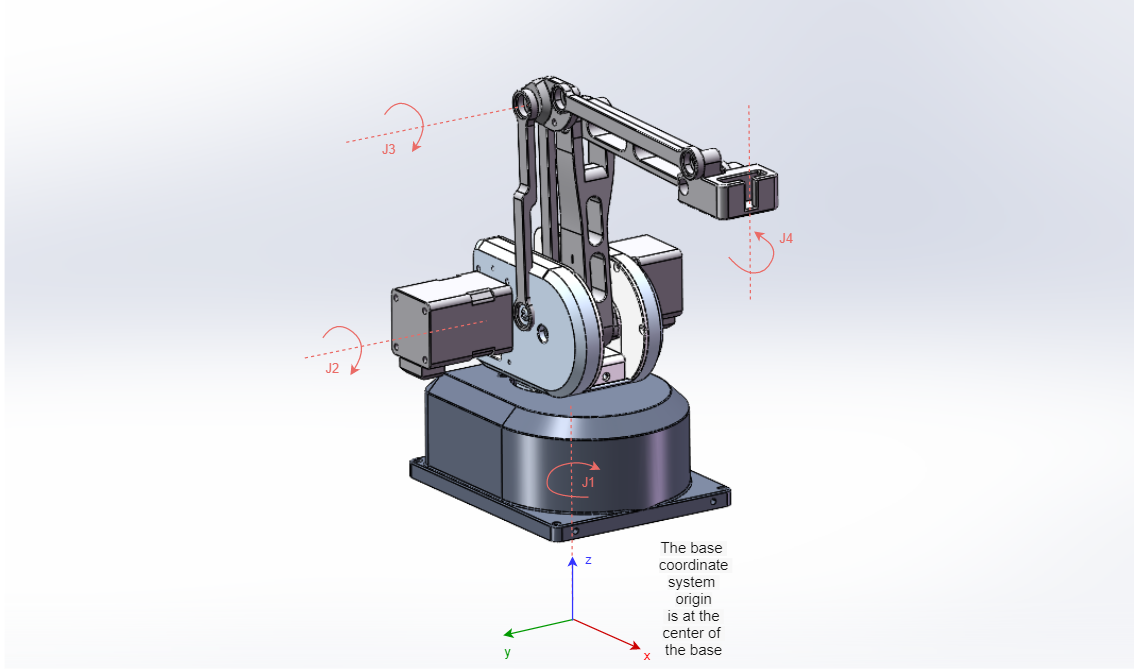
1.6 Joints and Cartesian coordinate systems
2 Chip parameters
| Project | Parameters |
|---|---|
| Core parameters | ATMEGA2560-16AU |
| Core processor | AVR |
| Kernel Bits | 8-bit |
| Frequency | 16MHz |
| Connectivity | EBI/EMI,I2C,SPI,UART/USART |
| FLASH Capacity | 256KB (256K x 8) |
| EEPROM size | 4K x 8 |
| RAM capacity | 8K x 8 |
| Number of inputs/outputs | 86 |
| Working temperature | -40°C ~ 85°C |
| Core model | Mega2560 |