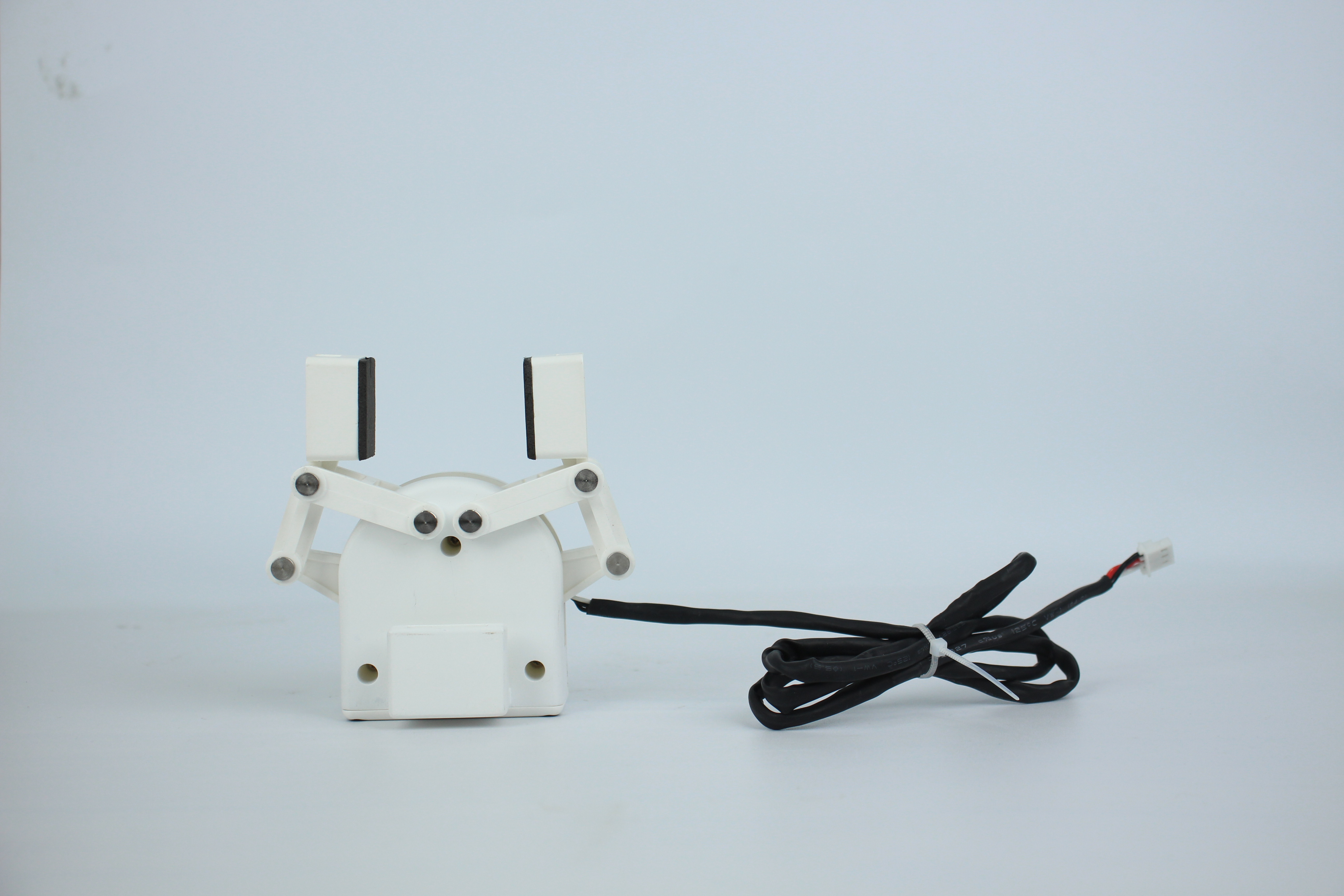
Adaptive gripper
Adapting model:ultraArm P340
Product diagram

Description:
| Name | Adaptive gripper |
|---|---|
| model | ultraArm_gripperAg_white |
| Workmanship | ABS injection molding |
| Colour | White |
| Clamping range | 20-45mm |
| Maximum clamping force | 150g |
| Repetition accuracy | 1mm |
| Service Life | One Year |
| Drive mode | electric |
| Transmission mode | Gear+Connecting rod |
| Size | 112×94×50mm |
| Weight | 100g |
| Fixing method | Lego connector |
| Environmental requirements | Normal temperature and pressure |
| Control interface | Serial port control |
| Applicable equipment | ultraArm |
Adaptive gripper: Use of object clamping
Brief Introduction
- Clamping claw is a kind of robot component which can realize the function similar to human hand. The utility model has the advantages of complex structure, firm grasping object, being difficult to drop and easy to operate. The gripper kit includes gripper accessories and LEGO technology parts. It controls the end effector of the mechanical arm through a programmable system to achieve the functions of object grasping, multi-point positioning, etc. Clamps can be used in all development environments, such as ROS, Arduino, Roboflow, etc.
Working Principle
- Driven by a motor, the finger surface of the gripper makes linear reciprocating motion to achieve opening or closing action. The acceleration and deceleration of the electric gripper are controllable, the impact on the workpiece can be minimized, the positioning point can be controlled, and the clamping can be controlled.
Applicable objects
- Small square
- Ball
- Long object
Use Adaptive gripper in Python environment:
from pymycobot import ultraArm
# Connecting the mechanical arm
ua = ultraArm('COM17', 115200)
ua.sleep(0.5)
# Open clamping jaws
ua.set_gripper_state(1)
ua.sleep(2)
# Close clamping jaws
ua.set_gripper_state(0)
ua.sleep(2)
Reference video