Controlling Multiple Joint Motion
Please confirm before starting:
1.Python environment has been installed and pymycobot package has been downloaded;
2.Firmware has been burned;
3.ultraArm switch (next to the power cord) has been turned on.
Learning contents of this chapter
Use myBlockly to control ultraArm multiple joint motion.
API Module Introduction
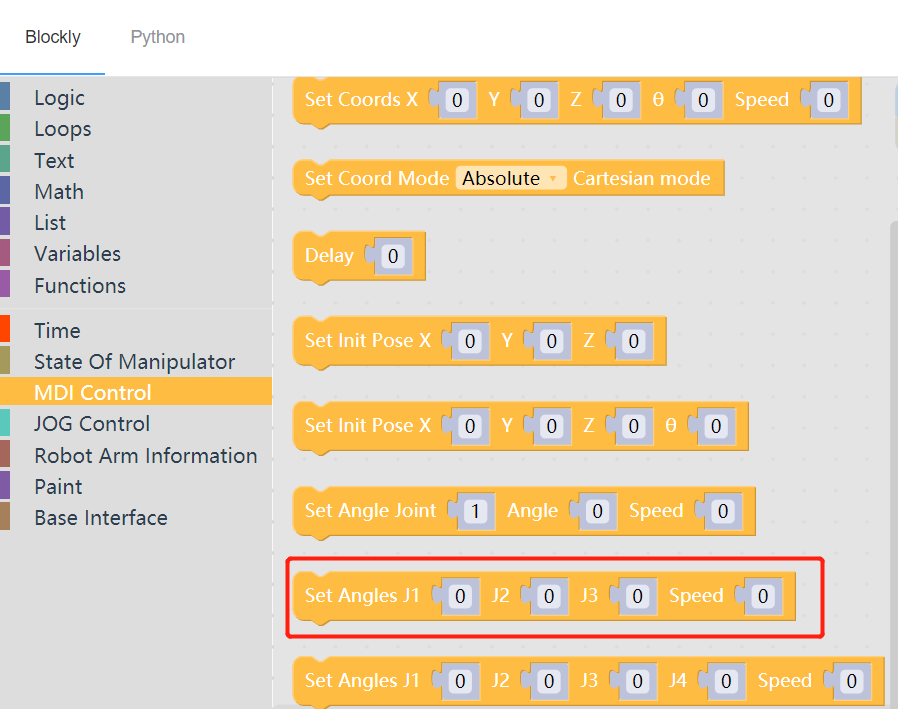
- Method module:
Set full joint angle - Objective:Control the multi joint movement of the mechanical arm
- Parameters:
- Angle parameter:Please refer to the ultraArm parameter to set each joint angle
| Joint | Range |
|---|---|
| J1 | -150° ~ +170° |
| J2 | -20° ~ +90° |
| J3 | -5° ~ +70° |
| J4(accessory) | unlimited |
- Speed parameter: range 0-100
Simple demonstration
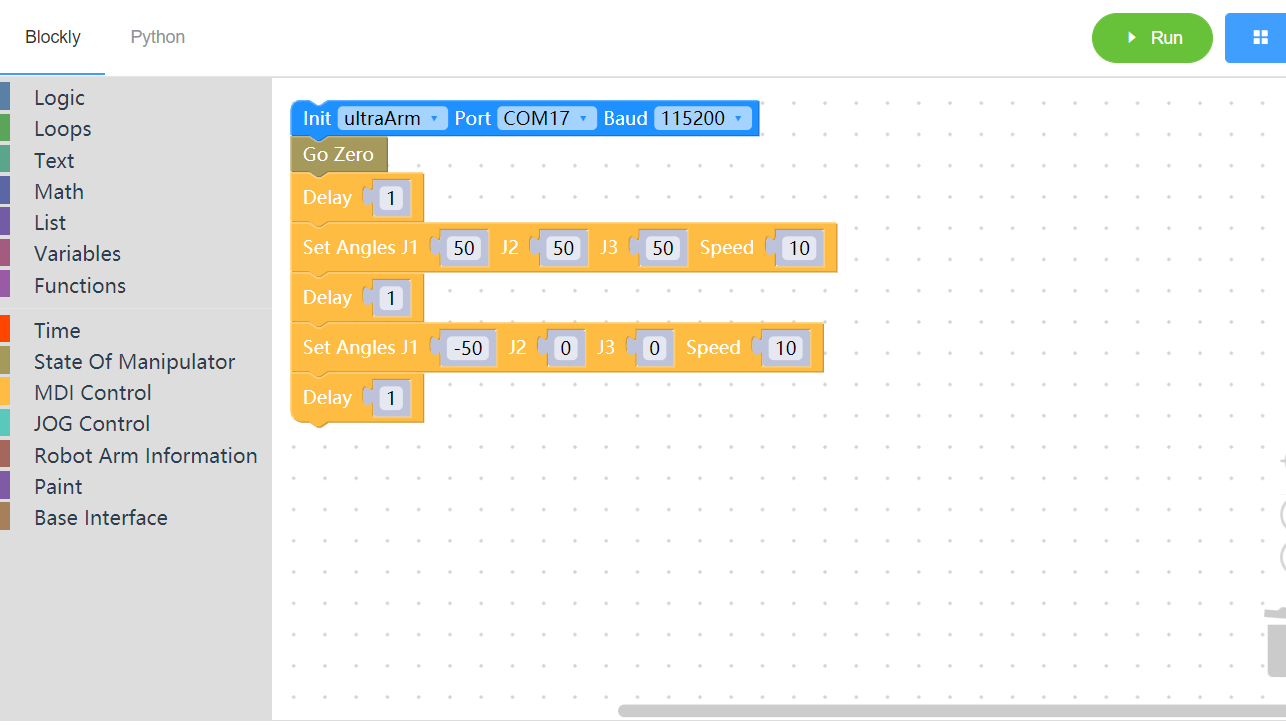
Realize action: Each joint of ultraArm returns to zero. After waiting for 1 second, joint 1, joint 2, and joint 3 move to 50 ° at a speed of 10 respectively. After completion, joint 1, joint 2, and joint 3 move to - 50 ° at a speed of 10 respectively, and the operation ends.