Use of clamping jaws
Please confirm before starting:
1.Python environment has been installed and pymycobot package has been downloaded;
2.Firmware has been burned;
3.ultraArm switch has been turned on
4.The jaw interface has been connected.
Learning contents of this chapter
Use myBlockly to control the gripper.
API Module Introduction
- Method module 1:
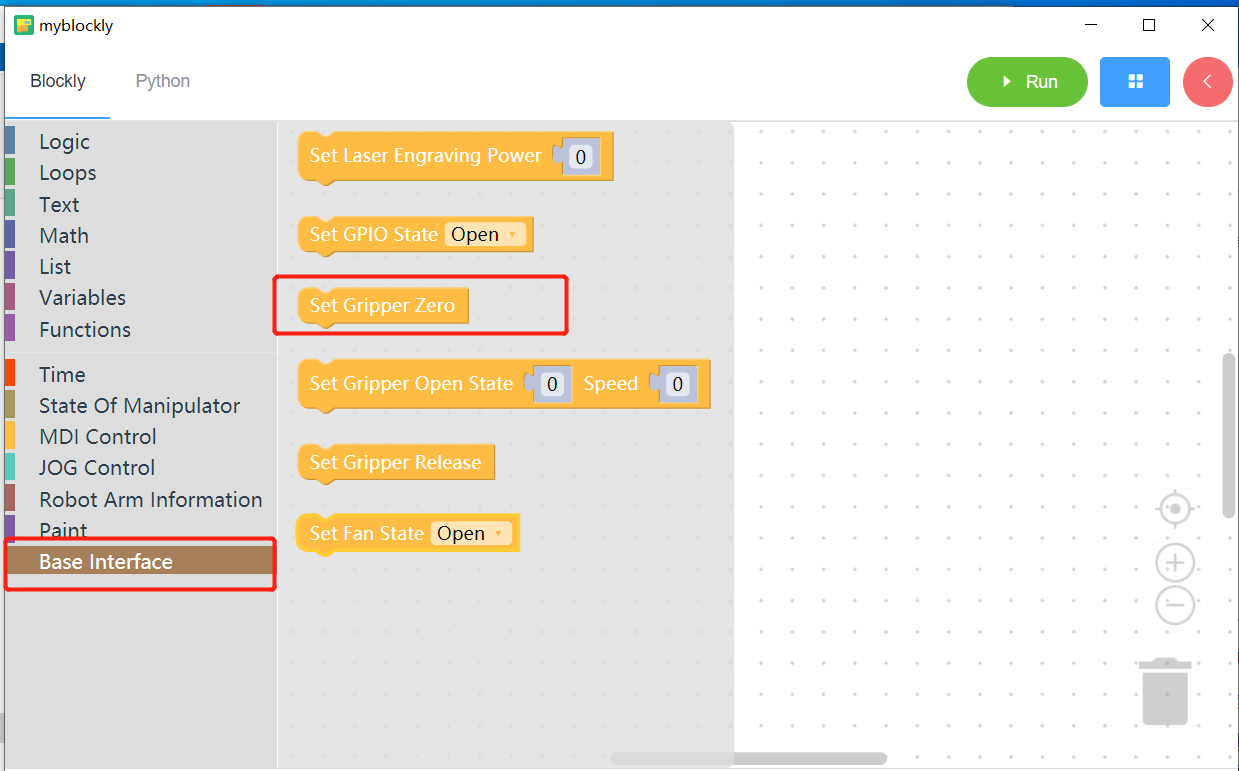
Calibrate the zero position of clamping jaws - Objective:Calibrate the zero position of clamping jaws
- Note:Before using this method, open the clamping jaws to the maximum position
- Method module 2:
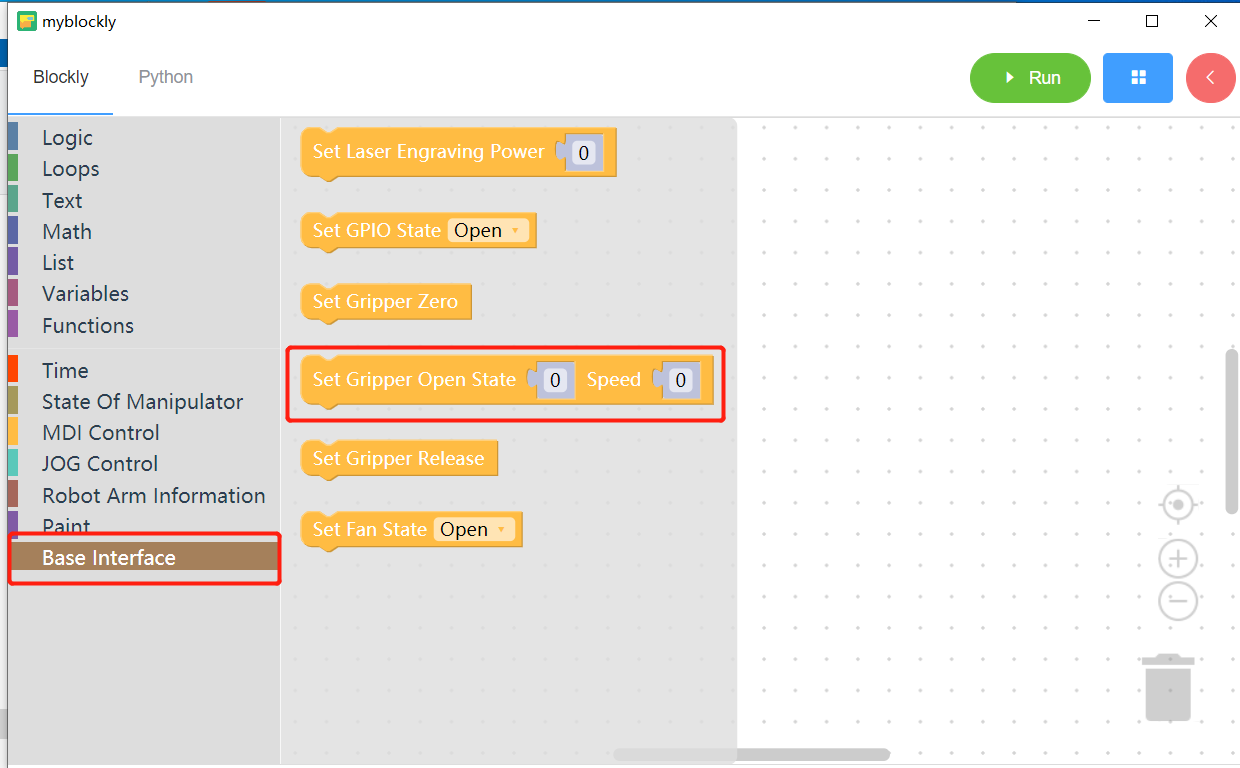
Set gripper switch - Objective:Control gripper opening or closing
- Parameters:
- Jaw status parameter: open/close 0-100: 0- fully closed, 100- fully open, speed:0-1500 RPM/s
Simple demonstration
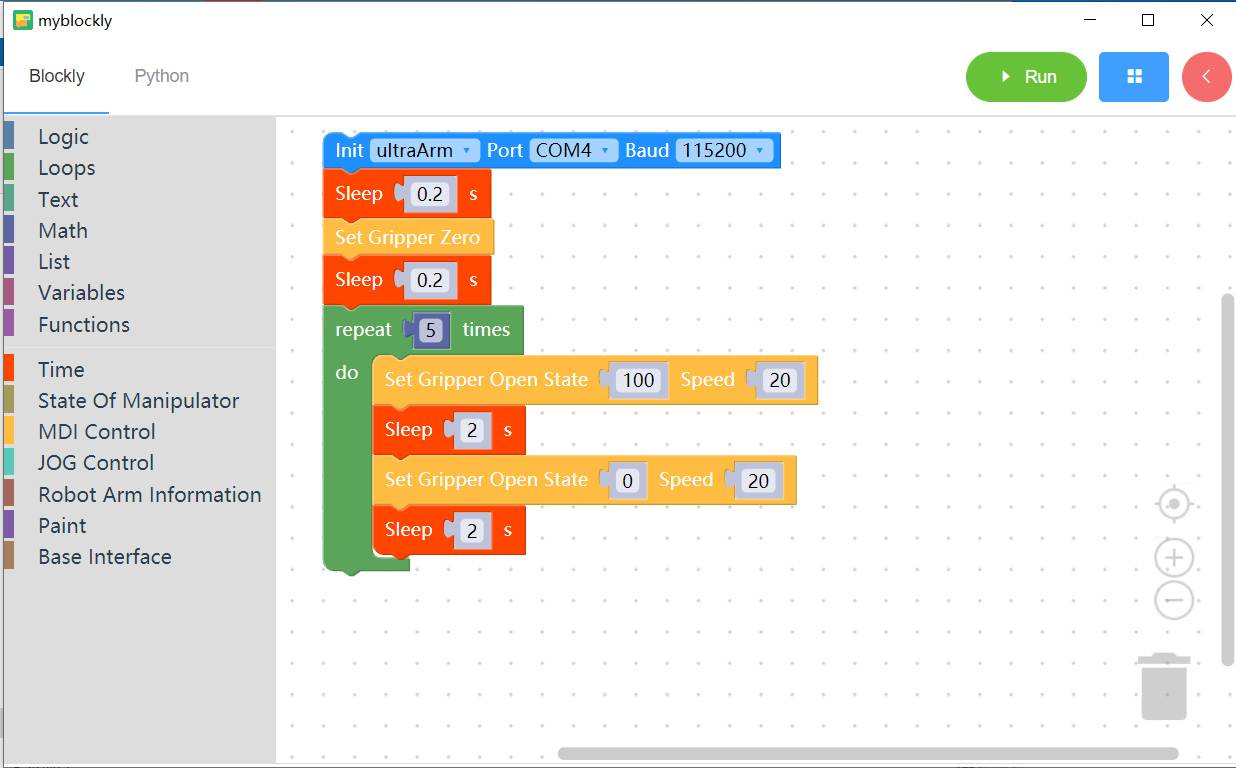
Implementation action: 0.2 seconds later, the gripper will set the current position to zero. 0.2 seconds later, the gripper will repeat the open close action at the current position for 5 times.