Control suction pump and stacking and handling
Please confirm before starting:
1.Python environment has been installed and pymycobot package has been downloaded;
2.Firmware has been burned;
3.ultraArm switch has been turned on
Learning contents of this chapter
Use myBlockly to control suction pump and stacking and handling.
API Module Introduction
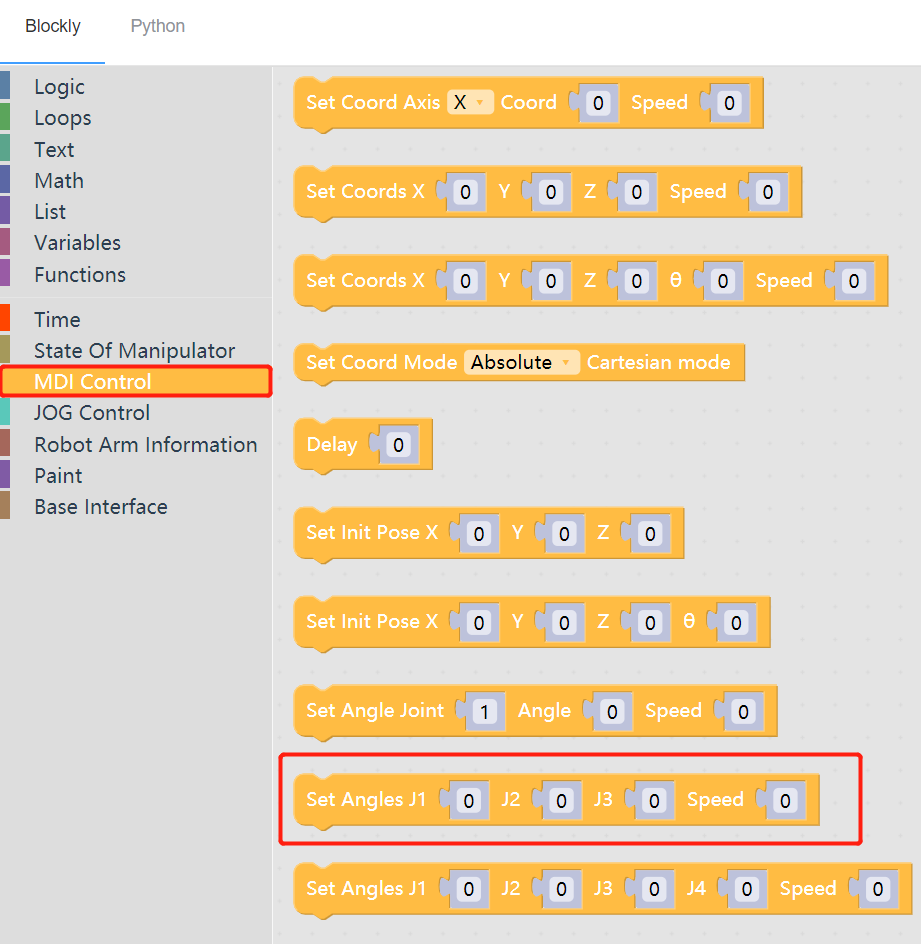
- Method module 1:
Set full joint angle - Objective:Full joint angle setting can realize robot stacking and handling
- Parameters:
- Angle parameter: please refer to the ultraArm parameter to set the angle of each joint (you can set which joint you want)
| Joint | Range |
|---|---|
| J1 | -150° ~ +170° |
| J2 | -20° ~ +90° |
| J3 | -5° ~ +70° |
| J4(accessory) | unlimited |
- Speed parameter: range 0-100
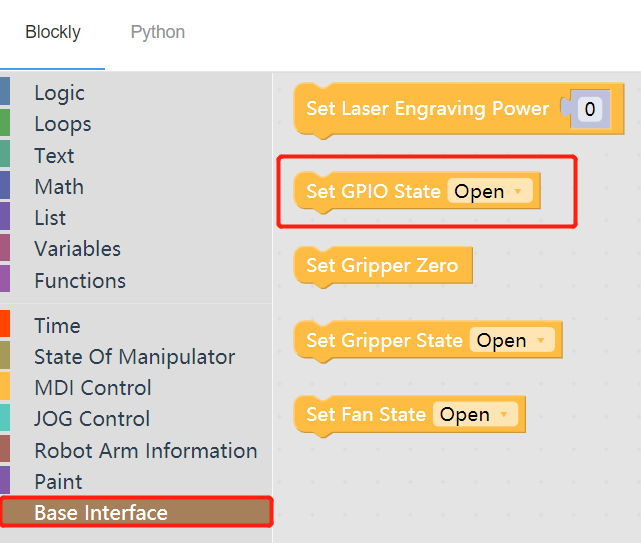
- Method module 2:
Set suction pump status - Objective:Set suction pump switch
- Parameters:
- Status parameter: On/Off
Simple demonstration
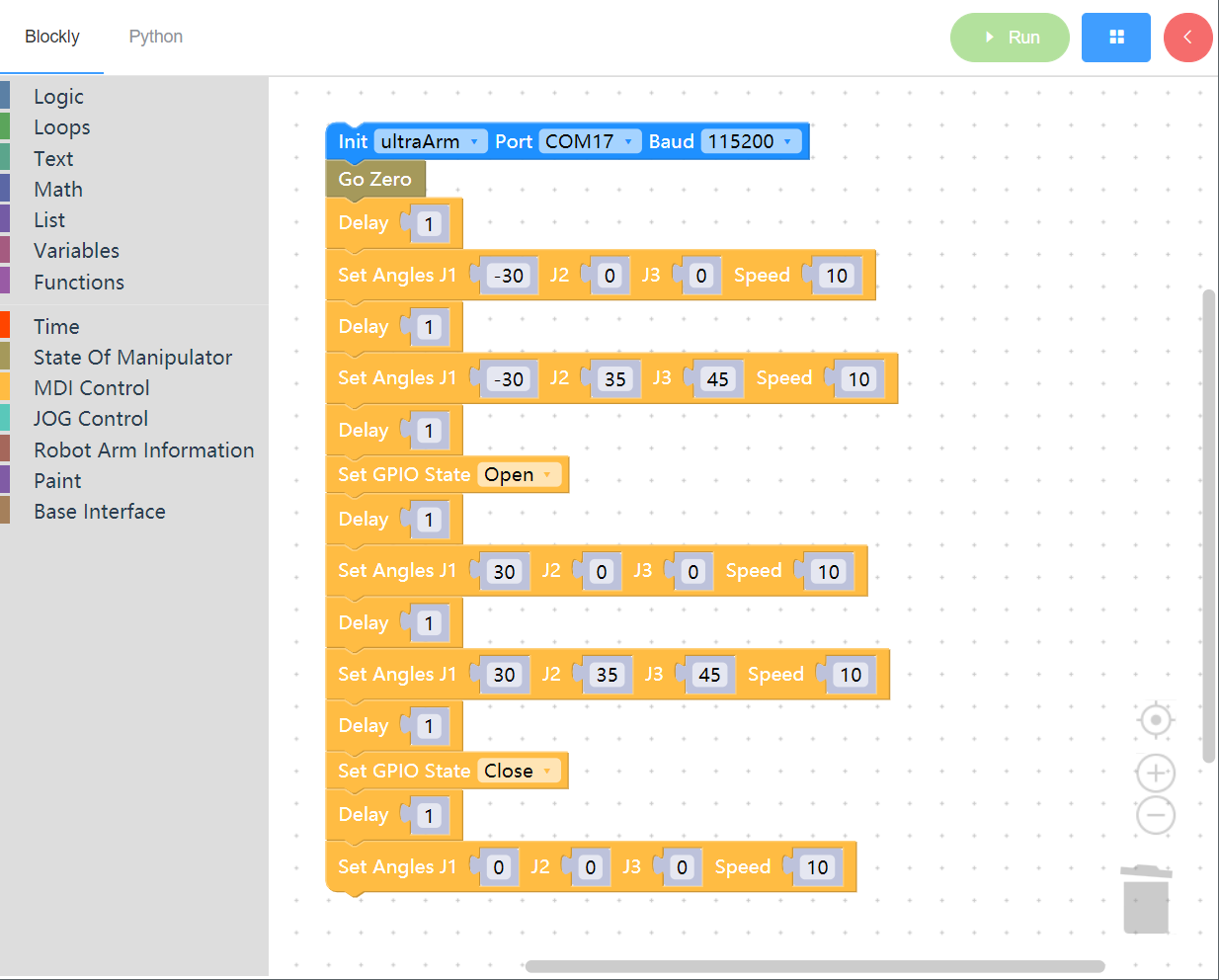
Realize actions: the mechanical arm returns to zero. After a delay of one second, joint 1 moves to - 30 ° at a speed of 10. One second later, joint 2 and joint 3 move to 35 ° and 45 ° at a speed of 10. One second later, the suction pump starts to work. One second later, joint 1, joint 2 and joint 3 move to 30 °, 0 ° and 0 ° at a speed of 10. One second later, joint 2 and joint 3 move to 35 ° and 45 ° at a speed of 10. One second later, the suction pump stops working. One second later, the mechanical arm returns to zero.