Software problems
Q: When using the writing and drawing function, how to eliminate the track between the place where the pen is placed and the starting point of the track? A: Set the pen lift and pen drop height, and pay attention to the setting of the Z axis of the starting point, and ensure that the sum of the Z axis and the pen drop height can make the pen just fall on the paper normally
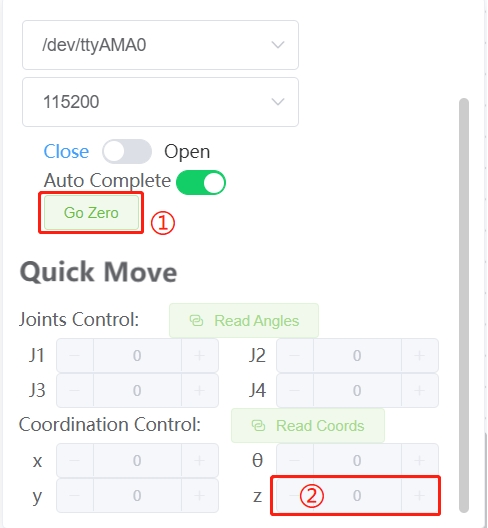
Q: How to control the distance between the end and the desktop, for example, how to set it if you want the end to be close to the desktop?
A: If you want the end of the arm to stay close to the desktop, it is recommended that you use the myblockly fast movement tool, first click back to zero and then reduce the value of the z axis, adjust to the appropriate position, and then record the current xyz axis joint value, fill the joint value into the code block to use the program to control the end to be close to the desktop.
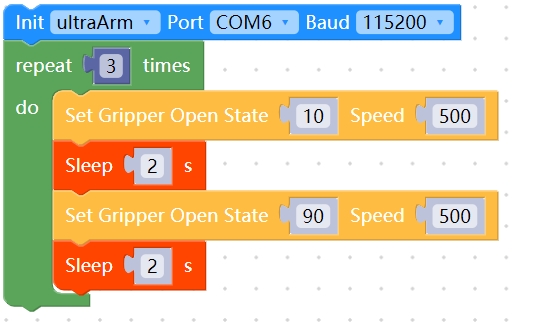
Q: ultraArm+ gripper source code:
Q: Can p340 start the program to control the robot arm when it is turned on?
- A: Currently not possible
Q: Why is the writing on 340 in the form of strokes? How to set it to be fully filled
- A: Refer to the figure below, select fill in the processing method

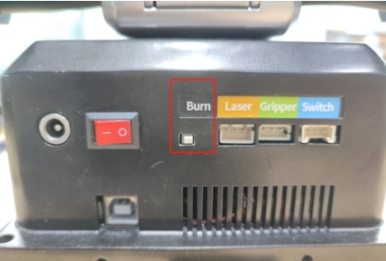
Q: When using mystudio to burn the firmware, what should I do if it cannot be burned normally?
- A: Note that when burning the firmware, you must press the burn button before starting the process. You need to check whether the burn button is pressed. After the burn is completed, remember to keep the button unpressed before using it

Q: The robot arm suddenly loses its ability and is in a released state during use. How to deal with it?
- A: When using code to control the machine, please make sure that you have released the "burn" button, that is, keep the button in an unpressed state. This sudden release will occur when the "burn" button is pressed and released during power-on reset.
Q: What is the possible reason for the last stroke of the Aotron to be crooked? If you want to correct the shaking of the robot arm, can the customer correct it?
- A: The locking torque of some screws on the robot arm is not enough. Tighten the screws on the robot arm a little more
Q: How to deal with the situation that the 340 machine cannot burn the firmware using mystudio?
- A: When we tested the p340 machine ourselves, some computers could not burn MyStudio. Just put MyStudio on other disks (except C drive). The permissions required for C drive will be more stringent.
1 About myStudio
Q:What is myStudio
- A: It is a firmware burner.
Q:Why can't the device work normally after I burn the firmware to the terminal?
- A:The firmware of ATOM terminal needs to use our factory firmware, and other unofficial firmware cannot be changed during use,If the device accidentally burns other firmware, you can use“myCobot Firmware Burner” . Select ATOM terminal-select serial port-Select ATOMMAIN firmware to burn ATOM terminal.
Q:Can the dragging teaching in the minirobot firmware control the gripper?
- A:It is temporarily impossible to control the gripper by dragging teaching, because the gripper belongs to No. 7 joint, our dragging teaching can only record and play the motion of No. 1-6 joints.
Q:Why can't I drag the teaching after burning the minirobot firmware?
- A:First, check whether the M5Stack-basic firmware and atom firmware are burned,Whether the firmware burned corresponds to the requirements to be realized and whether the latest version of firmware is burned. The bottom M5Stack-basic burns minirobot, and the top Atom burns atommain。
Q:What if the serial port of mycobot is not recognized in my studio?
- A:If your computer device does not prompt the connected mechanical arm, please install the serial port driver first。In addition, it should be noted that the raspberry pie, Arduino and Jetson nano series mechanical arms cannot be connected to the laptop computer using the data cable. You need to use mystudio in the built-in system to burn the firmware.
Q:Drag the teaching recording track, can it be saved in the card?
- A:Unable to save to memory card at present. And dragging teaching can only save one path at a time, and the next recording will overwrite the previous action.
2 About RoboFlow
Q: Can I use robotStudio software programming?
- A: Our own industrial programming software robotFlow can be used. robotStudio is owned by ABB and cannot communicate with us.
Q:Why does the rapid movement of the robotFlow software exceed the limit?
- A:One or more joints may exceed the limit。
Q:How does roboflow load a written program?
- A:After logging in, select program robot(Programming).Then click load program(Loader)。Click run program(Run Program) directly can't be used except for pro600.
Q:Is it normal that 456 joints stop in the log when pro600 is using roboflow?
A:This is normal
3 About myCobot phone controller
Q:What version of firmware should the myCobot phone controller app burn?
- A:You need to burn the atom firmware atommain version 2.5 in mystudio。
4 About myblockly
Q:Why does myblockly always pop up when it runs?
- A:Before running the myblockly program, you must first close the serial port occupation.
5 About ROS1
Q: When the terminal switches to "~/catkin_ws/src" and uses git to install and update "mycobot_ros", the target path "mycobot_ros" already exists. Why?
- A:It indicates that a
mycobot_rospackage already exists in~/catkin_ws/src. You need to delete it in advance and re-execute the git operation.
Q:When rosrun is running,terminal error displaycounld not open port /dev/ttyUSB0:Permission: '/dev/ttyUSB0',Why?
- A:Insufficient serial port permission,terminal input
sudo chmod 777 /dev/ttyUSB0to give permission。
Q:Why can't ros program run in vscode?
- A:Because the vscode terminal cannot be loaded into the ROS environment, it needs to run on the system terminal。
Q:When rosrun is running,terminal promptUnable to register with master node [http://localhost:11311]: master may not be running yet. Will keep trying,Why?
- A:Before running the ros program, you need to open the ros node,terminal input
roscore。
Q:When rosrun is running,terminal error displaycounld not open port /dev/ttyUSB0:No such file or directory: '/dev/ttyUSB1',Why?
- A:Serial port error。Confirm the actual serial port of the current mechanical arm。Can be viewed through
ls /dev/tty*
Q:Failed to build code forcatkin_makein Ubuntu 18.04,terminal promptProject 'cv_bridge' specifies '/usr/include/opencv' as an include dir, which is not found.and other error messages
- A:The opencv path in the configuration file does not match the actual system path。You need to use sudo to modify the configuration file(The path is
/opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake),the actual opencv path of the system is under the/usr/include/path.
Q:The newly cloned mycobot_ros package, and then run the rosrun program directly,it showspackage 'mycobot_280' not founderror or "The file could not be found"error ect.?
- A:The newly cloned mycobot_ros needs to build code to compile the ros environment.Terminal input
cd ~/catkin_ws/
catkin_make
source devel/setup.bash
Q:After compilation, why do the following errors occur when a new terminal runs the launch command?

- A1:The system does not add the ros environment variable, so every time you open a new terminal, you need to source:
cd ~/catkin_ws/
source devel/setup.bash
- A2:The system adds ros environment variables, and you don't need to execute source every time a new terminal is opened:
# noetic is Ubuntu20.04 system
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
- A3:It may be that the file name in the command is inconsistent with the file name in the actual mycobot_ros package. Please carefully check the command for errors。