Function description
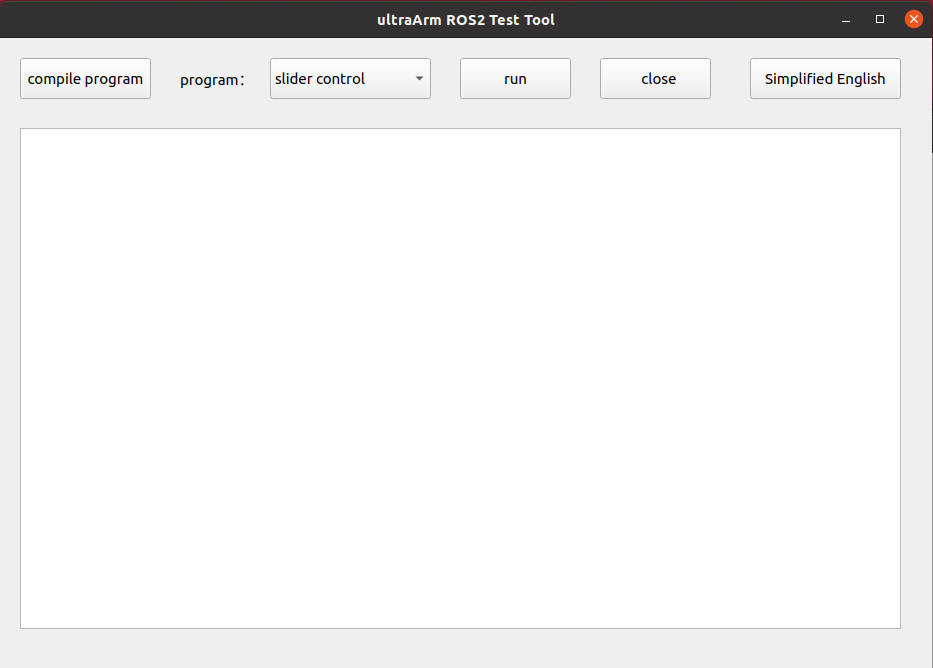
In order to avoid using ROS2 with too many tedious commands, the ultraArm one click startup tool is prepared here, including compiler, rviz2 display, and slider control.
Procedure
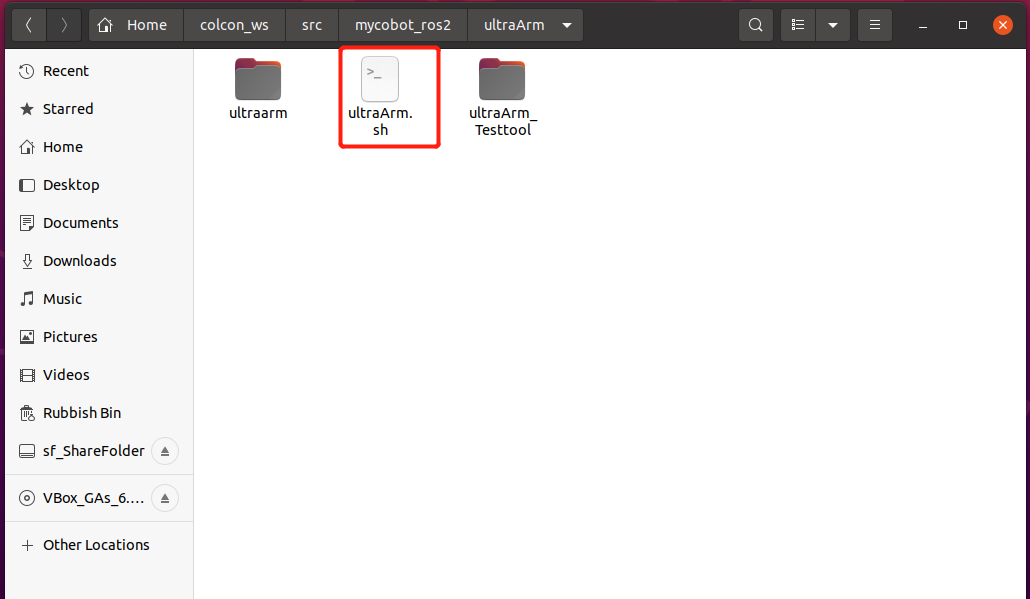
1 Open File Manager --> colcon_ws ---> src--> mycobot_ros2--> ultraArm ,double click to open ultraArm.sh file,enter the tool interface.
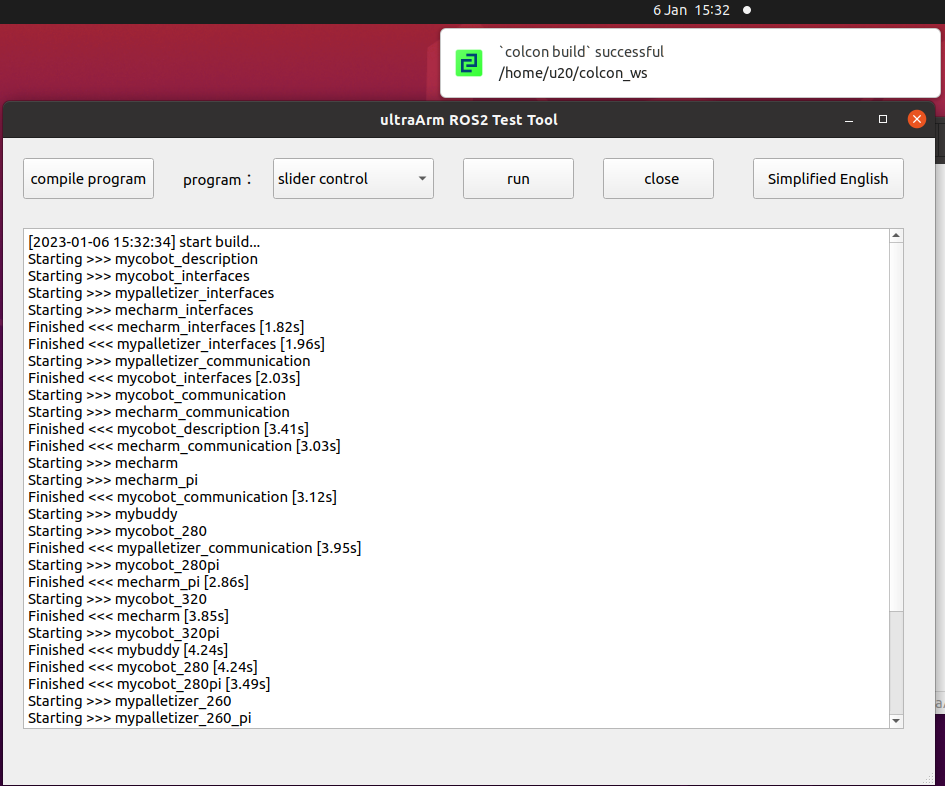
2 If the mycobot_ros2 package is cloned remotely for the first time or the files under the mycobot_ros2 package are changed, the program needs to be compiled.
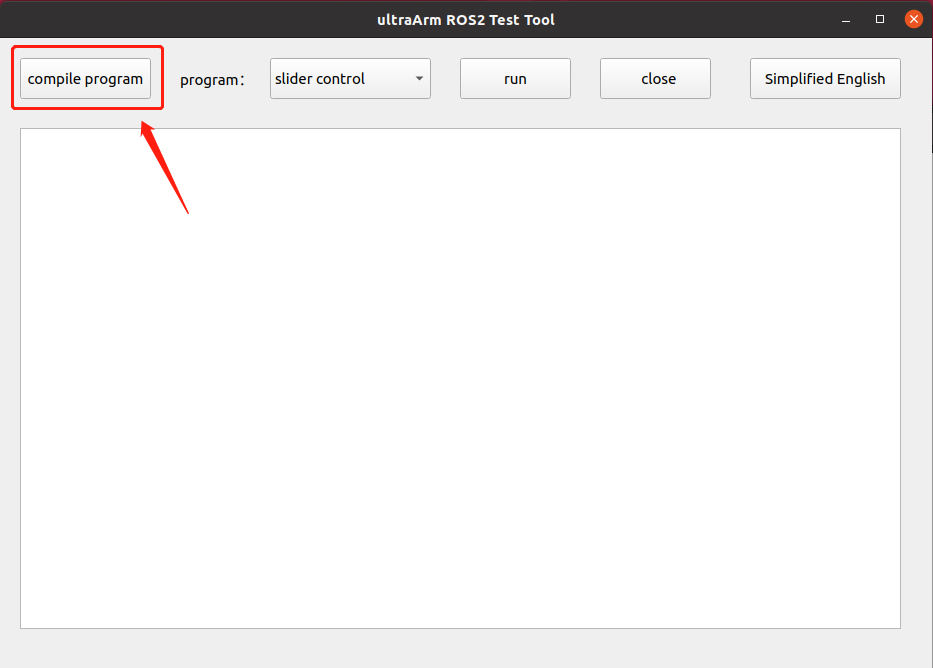
If the compilation is successful, the following prompt will appear:
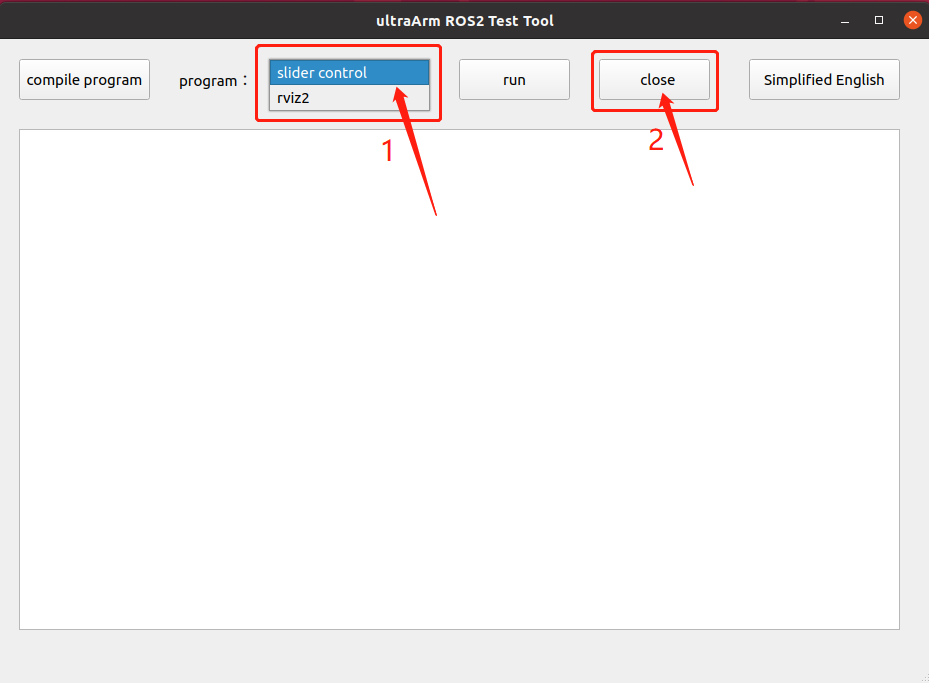
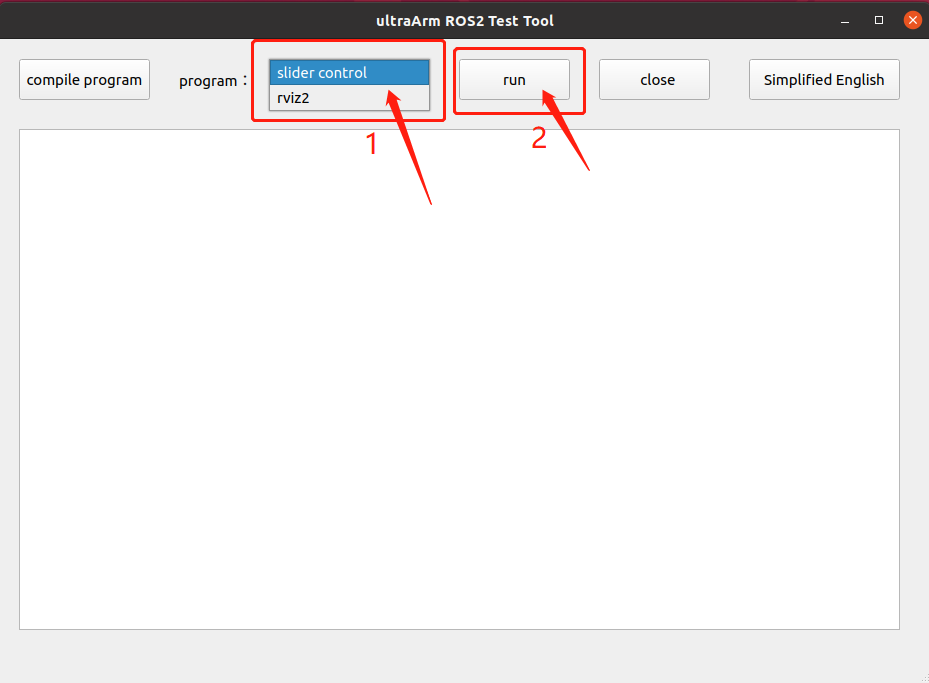
3 Select the program to run and click Run.
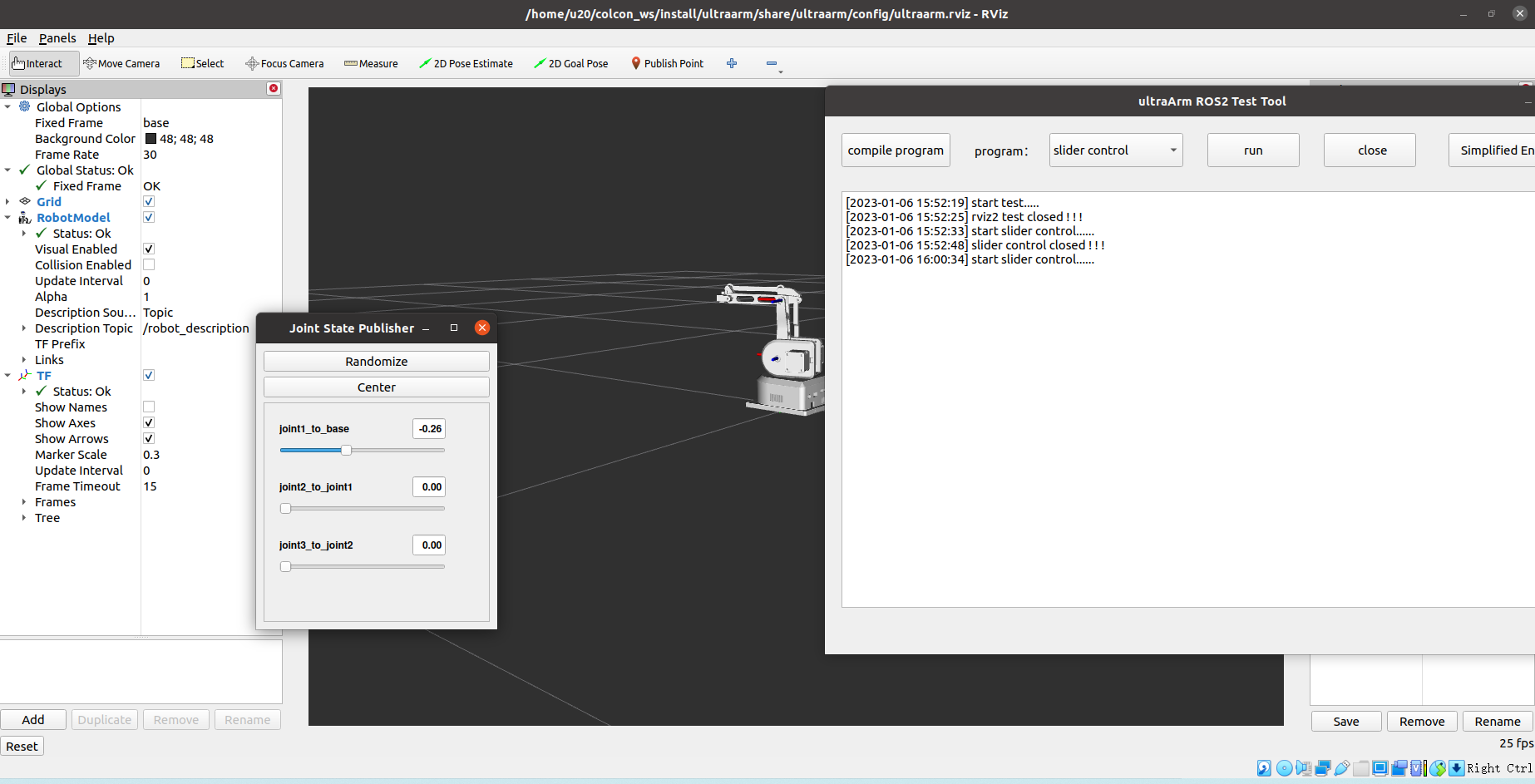
4 Select the currently running program and click Close.