Instructions for using adaptive gripper + quick-change servo
Applicable models: ultraArm P340
1 Hardware connection
New version of quick-change servo + adaptive gripper
Insert one side of the Lego connection key into the gripper

Then insert the other side of the Lego connection key into the quick-change servo
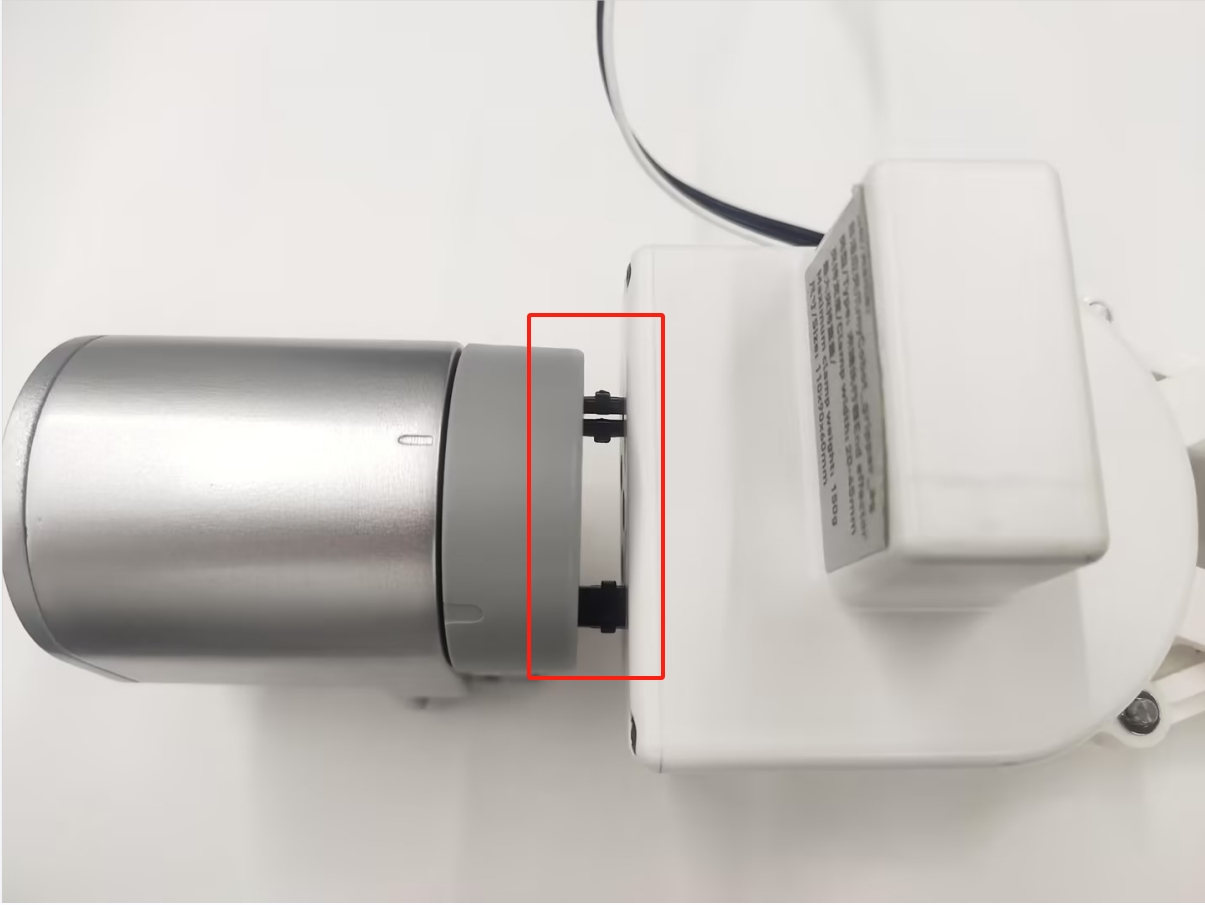
Both sides of the Lego connection key are inserted tightly

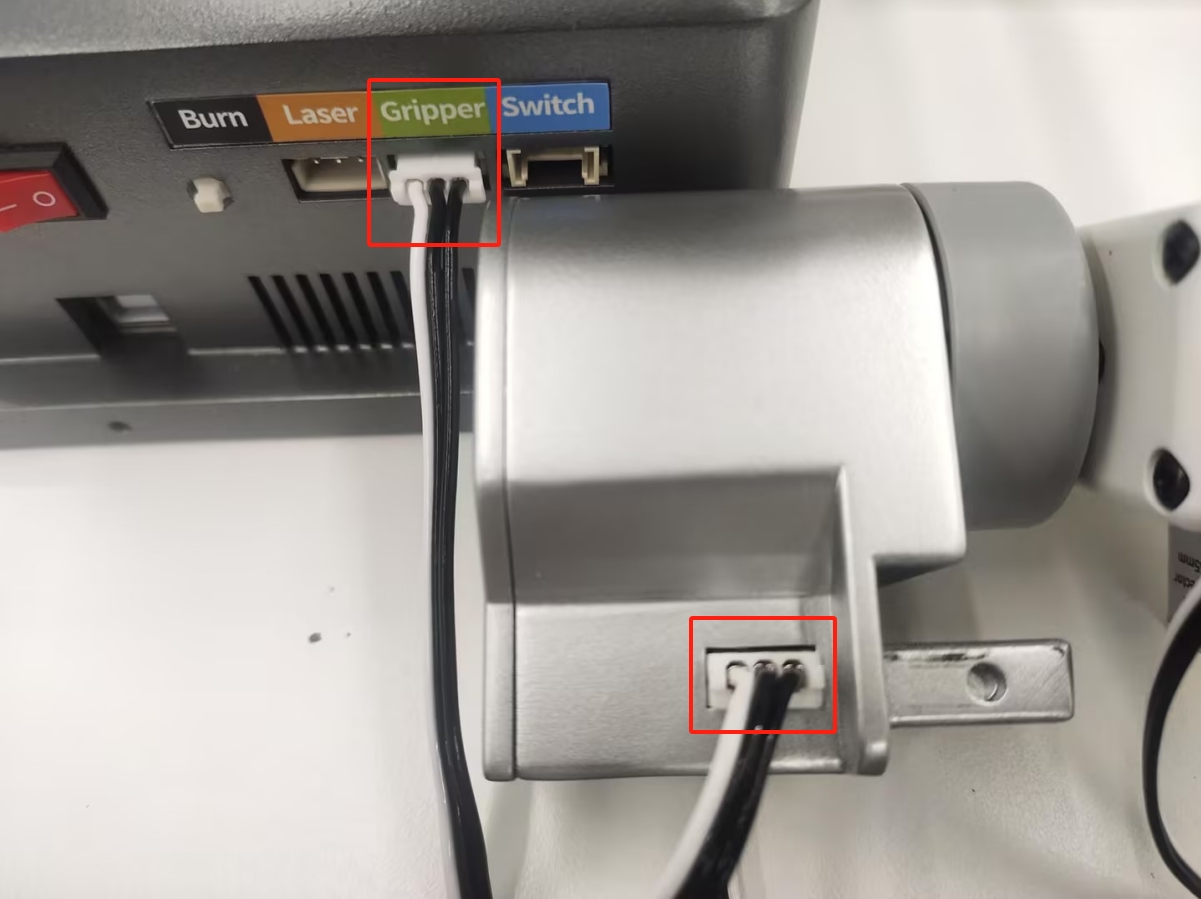
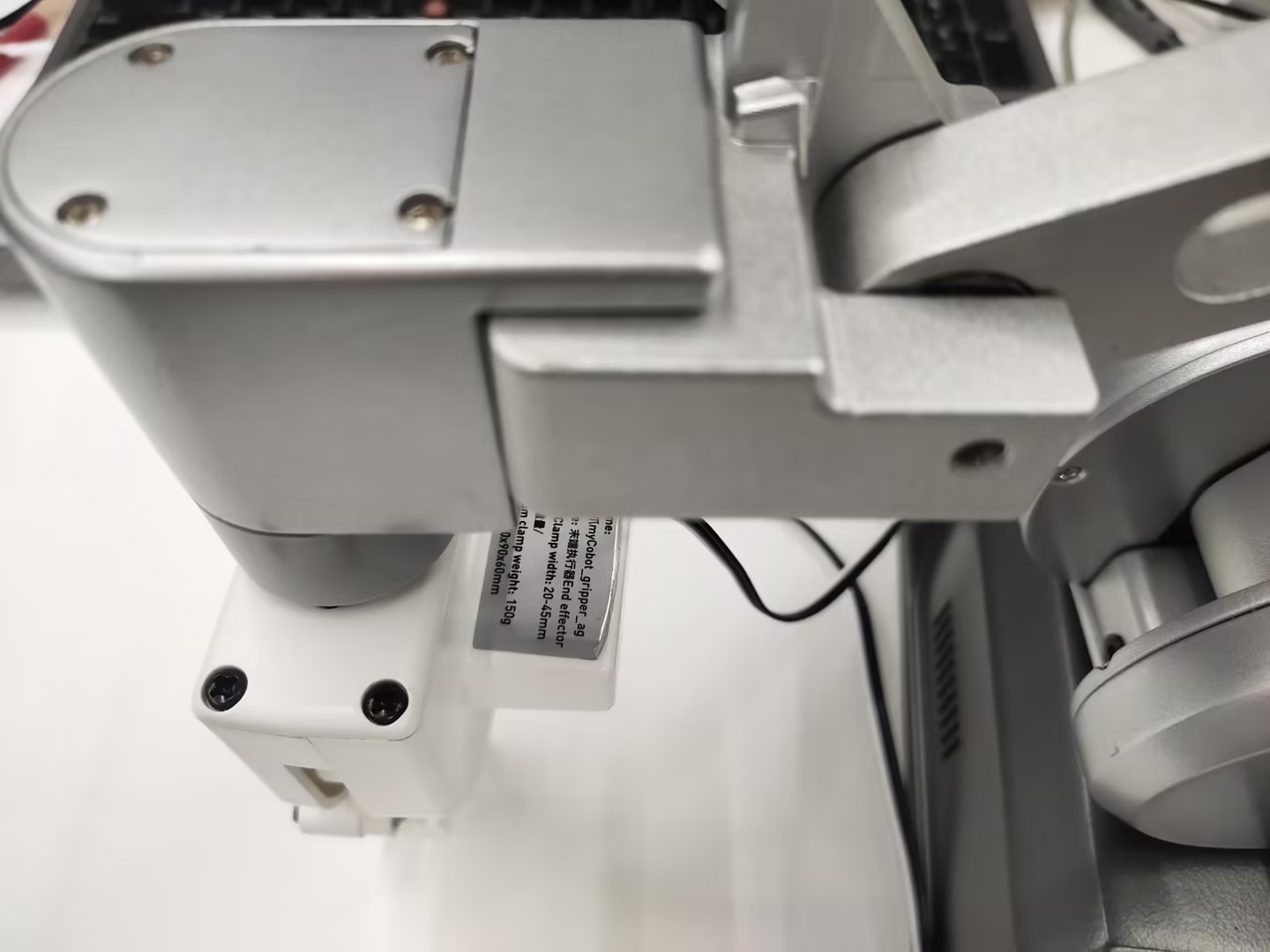
Connect the gripper cable to any port of the quick-change servo

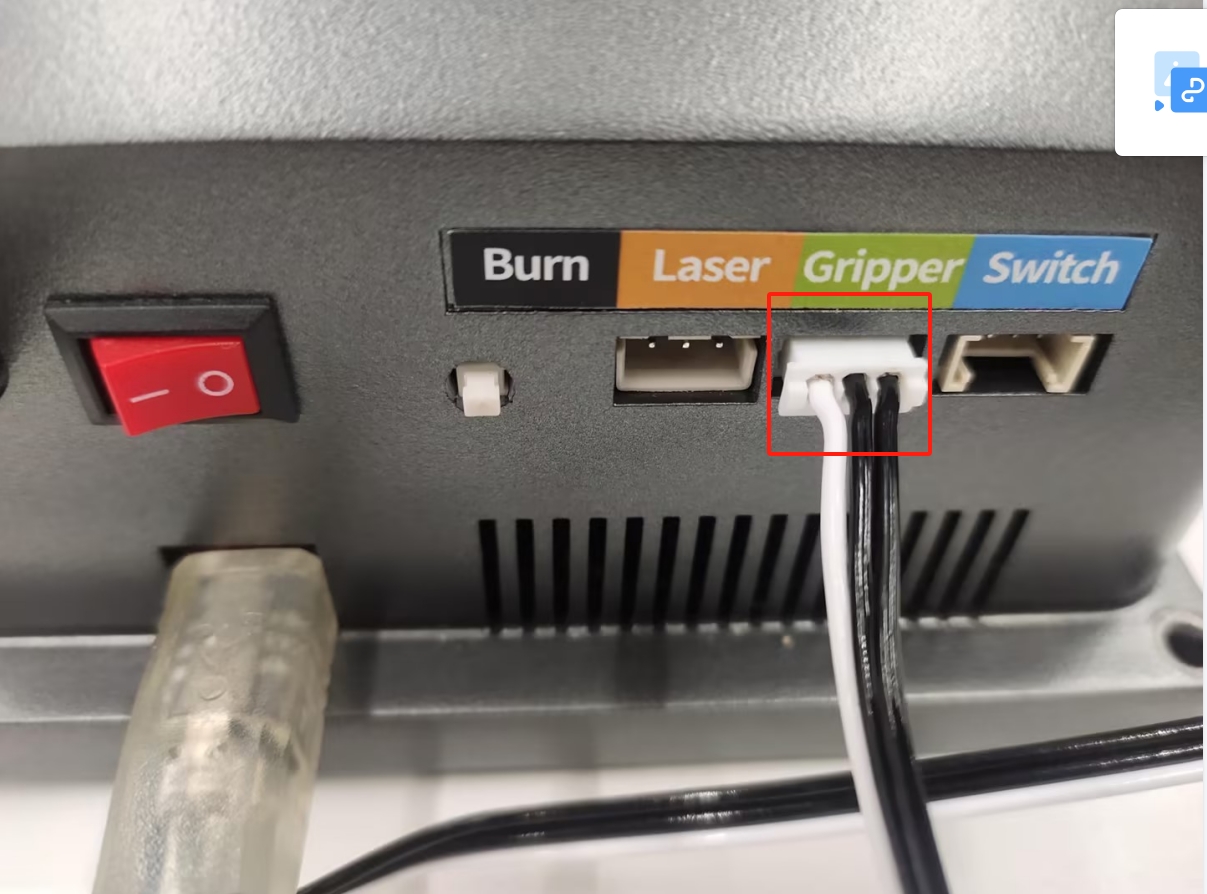
Connect the quick-change servo cable to the port on the other side of the quick-change servo, and then connect it to the gripper socket on the base of the robot
Install the quick-change servo to the end of the robot

Old version quick-change servo + adaptive gripper
Insert one side of the Lego connector into the gripper
Then insert the other side of the Lego connector into the quick-change servo

Plug both sides of the Lego connector tightly

Use a 3-pin cable to connect to the gripper socket of the robot base
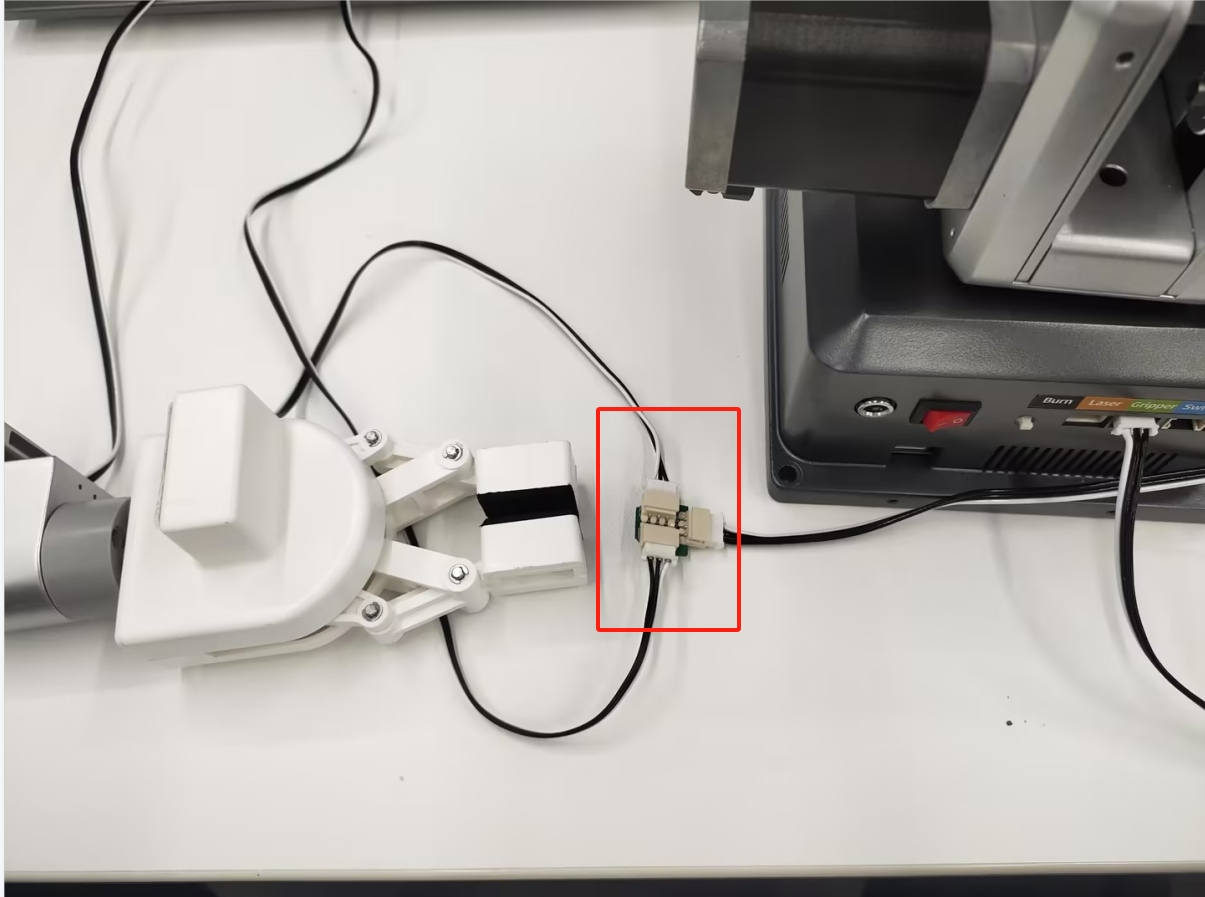
Connect the servo cable, gripper cable, and robot base cable to the adapter board
Install the quick-change servo to the end of the robot
2 Python example program
from pymycobot import ultraArm
# Connect the robot arm, fill in the actual serial port number of the robot arm
ua = ultraArm('COM13')
# Return to zero
ua.go_zero()
# Control the quick-change servo
ua.set_angle(4,90,90)
# Control the gripper
ua.set_gripper_state(50, 50)