Control the mechanical arm to return to zero
Please confirm before starting:
1.Python environment has been installed and pymycobot package has been downloaded;
2.Firmware has been burned;
3.ultraArm switch (next to the power cord) has been turned on.
Learning contents of this chapter
How to control the return of ultraArm to zero.
Note: ultraArm must return to zero before each movement, otherwise the angle cannot be read correctly.
API Module Introduction
- Method module:
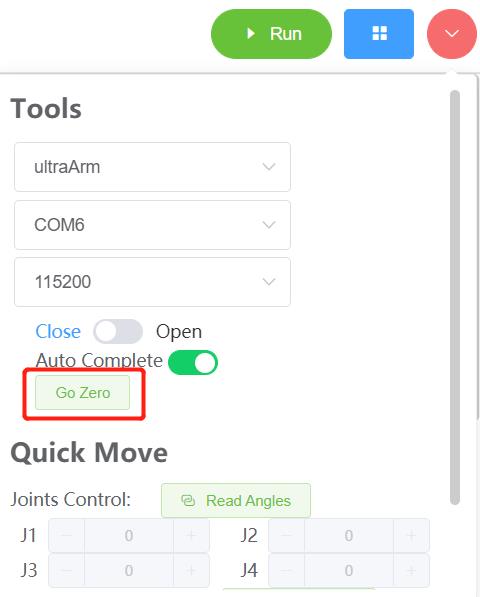
Return to zero - Objective: To make each joint of the mechanical arm return to the zero position.
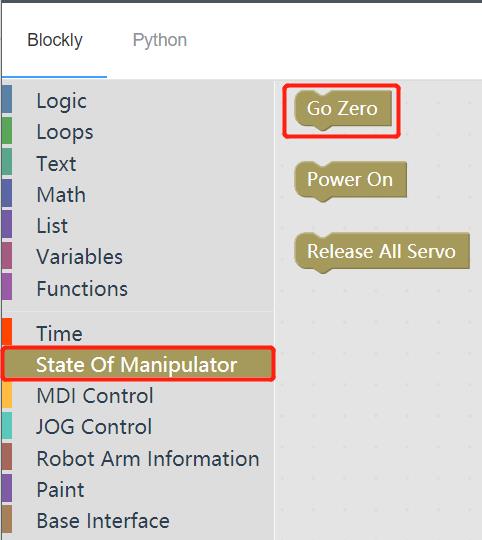
Return to zerooption in the toolbar:
Simple demonstration
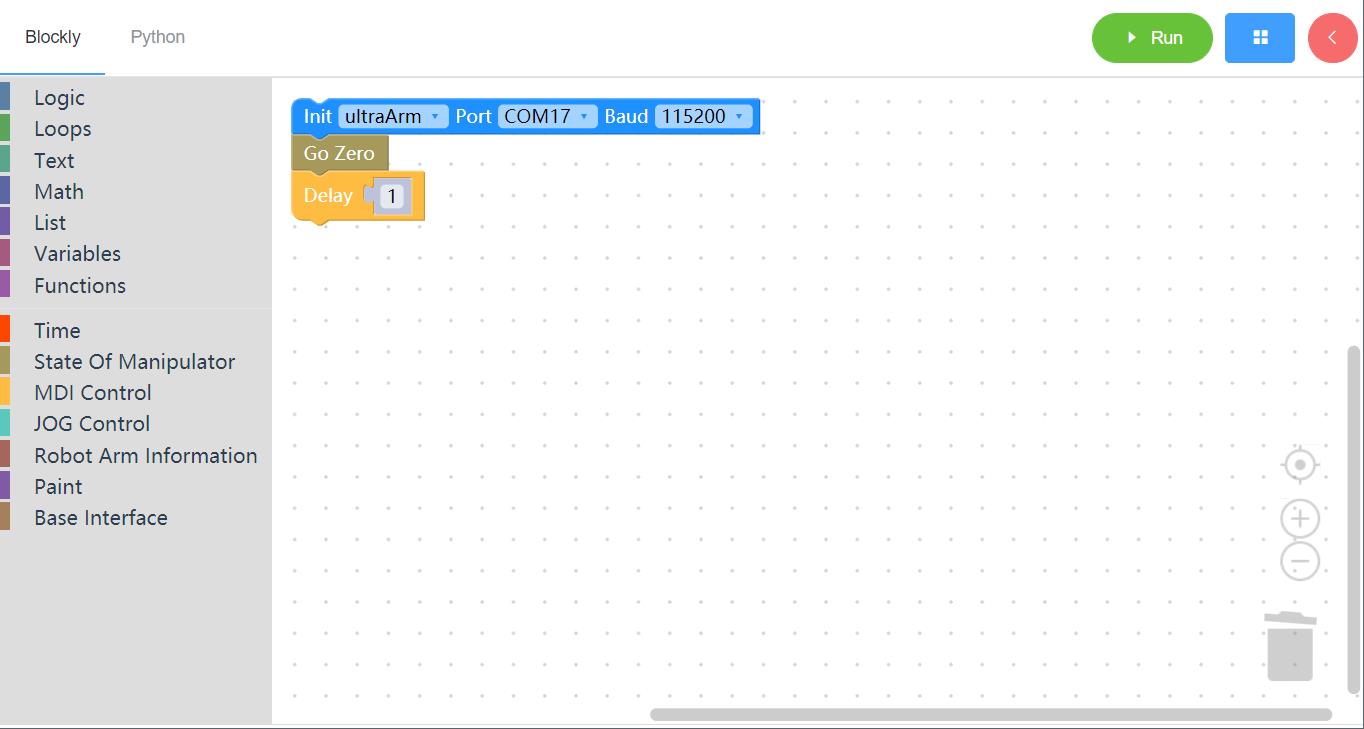
After
returning to the zeromodule, you can add adelaymodule to the mechanical arm, and then continue to do other actions after a slight pause.
Realize action: all joints return to zero.