Hardware Problems
Q: How to deal with the loud noise of the 340 base?
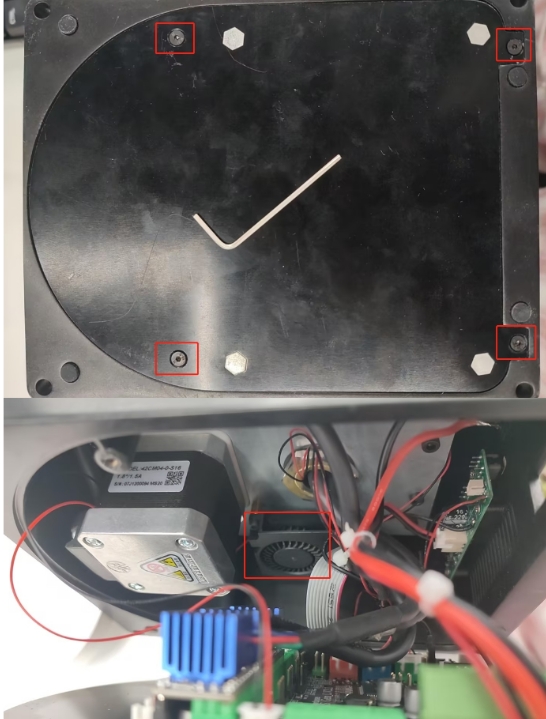
- A: This may be caused by the cooling fan inside the UltraArm340 base scraping the line. You can use an Allen wrench to unscrew the four screws at the bottom, push the line close to the cooling fan aside and simply fix it, and finally reinstall the bottom plate screws to solve this problem. Please refer to the following figure for the 4 screws of the base that need to be removed
Q: How to deal with the joint movement not being smooth and the robot arm not being able to be easily moved by hand?
- A: Check whether the structure in the figure below is too tight. You can slightly loosen the fixing screws on the right side of the figure below

1 About Structure
Q:How to solve the problem of mechanical arm shaking?
- A: Update the atom firmware version first,Burn the latest version of atommain firmware.Then update the pymycobot version,update pymycobot with pip,At last,run the change_PID.py file.
Q: The limit of myCobot's joint?
- A: 1-axis and 5-axis have limit position,The 1-axis is about 160° clockwise,and about 160° counterclockwise.The 5-axis can rotate about 160 ° clockwise and counterclockwise
Note:When rotating the mechanical arm, it should rotate slightly at a small angle. After reaching the limit, it should not continue to rotate with force.
Q:What controls the six steering engines?
- A:The steering gear is controlled by the top atom.
Q:What is the role of atom in the mechanical arm?
- A:Atom mainly carries out kinematics algorithm control of the mechanical arm in the mechanical arm, including forward and inverse kinematics, solution selection, acceleration and deceleration, speed synchronization, multiple square interpolation, coordinate conversion, real-time control and multithreading, etc. atom related programs are not open source for the time being.
Q:Why is the microprocessor based mechanical arm connected to the HDMI interface but the display screen does not display?Do I need to download the serial port driver?
- A: Check whether the wiring is correct and whether the power switch is turned on。Try to replace the HDMI connector. There are two HDMI connectors on the mechanical arm. The interface shall be firmly inserted,there is no need to download the serial port driver.
Q:What communication interfaces do different versions of mechanical arms support?
- A:Microprocessor based mechanical arm supports socket communication TCP;The mechanical arm based on microcontroller can communicate via USB to serial port.
Q:Why is the motor automatically powered off during use?
- A:Motor overheating protection for a long time. This phenomenon is normal. Wait a few minutes before continuing to use.
Q:Does the robot arm support Android development?
- A:We don't have a direct Android development environment for the time being. You need to develop it by yourself. We provide serial port protocols, which can be developed secondary.
Q:What's the function of raspberry pie's own USB interface?
- A:The raspberry pie 4B has its own USB port, which can supply power to the raspberry pie. It has no other special function temporarily.
2 About Parameters
Q: What is the speed unit of the mechanical arm?
- A: Running speed is 180 degrees per second.
Q:What is the communication frequency of mycobot 280-M5?
- A:10-20Hz。
3 About the End Retainer
Q: Can the adaptive gripper not be fully closed?
- A:The gripper itself will have a certain gap, which is not completely closed,You can adjust it by increasing the shim thickness between.
Q:What communication is mycobot280 adaptive gripper?
- A:mycobot280 adaptive gripper is ttl communication.
Q:What communication does the mycobot320 terminal provide?
- A:The mycobot320 terminal provides 485 communication interfaces.
Q:How to fix the USB camera at the end of the mechanical arm?
- A:Need to use flange to fix,you can purchase it independently