Control coordinate axis movement
Please confirm before starting:
1.Python environment has been installed and pymycobot package has been downloaded;
2.Firmware has been burned;
3.ultraArm switch has been turned on
Learning contents of this chapter
Use myBlockly to control ultraArm coordinate axis motion.
API Module Introduction
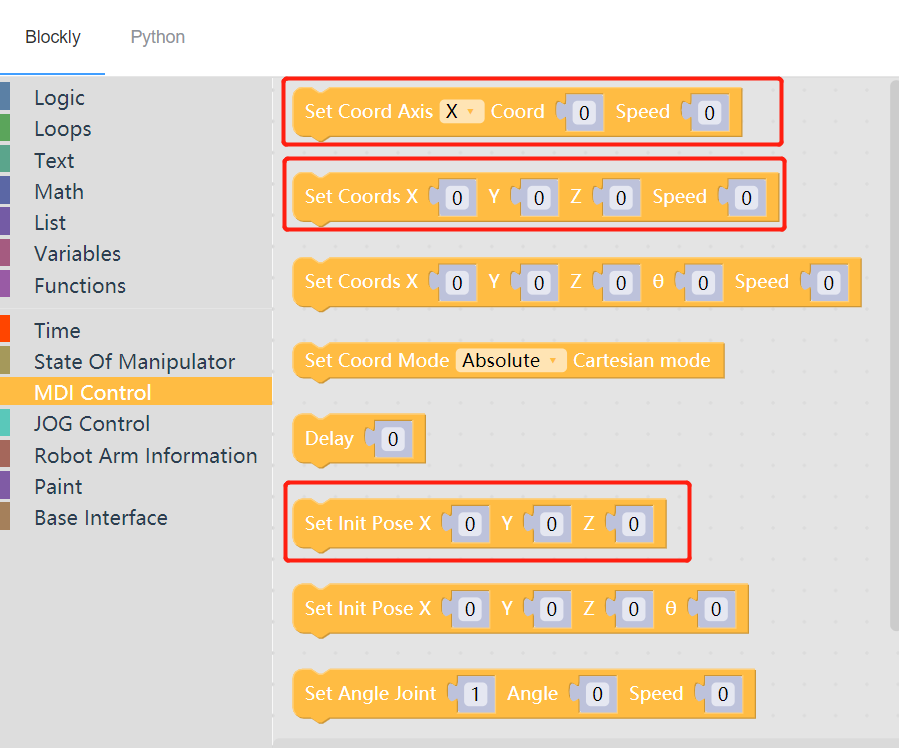
- Method module 1:
Setting of single seat standard axis - Objective:Set X, Y, Z axis coordinates only
Parameters:
- Axis parameters: X, Y, Z coordinates can be selected
- Coordinate parameters: -300-300
- Speed parameter: Range 0-100
Method module 2:
Set coordinate X () Y () Z ()- Objective:Set X, Y and Z coordinates simultaneously
Parameters:
- Axis parameters: X, Y and Z coordinates can be set at the same time
- Speed parameter: Range 0-100
Method module 3:
Set the current position as zero point- Objective:Set the current coordinate of the mechanical arm to zero
- Parameters:
- Axis parameters:X, Y and Z axes can be set at the same time
Simple demonstration
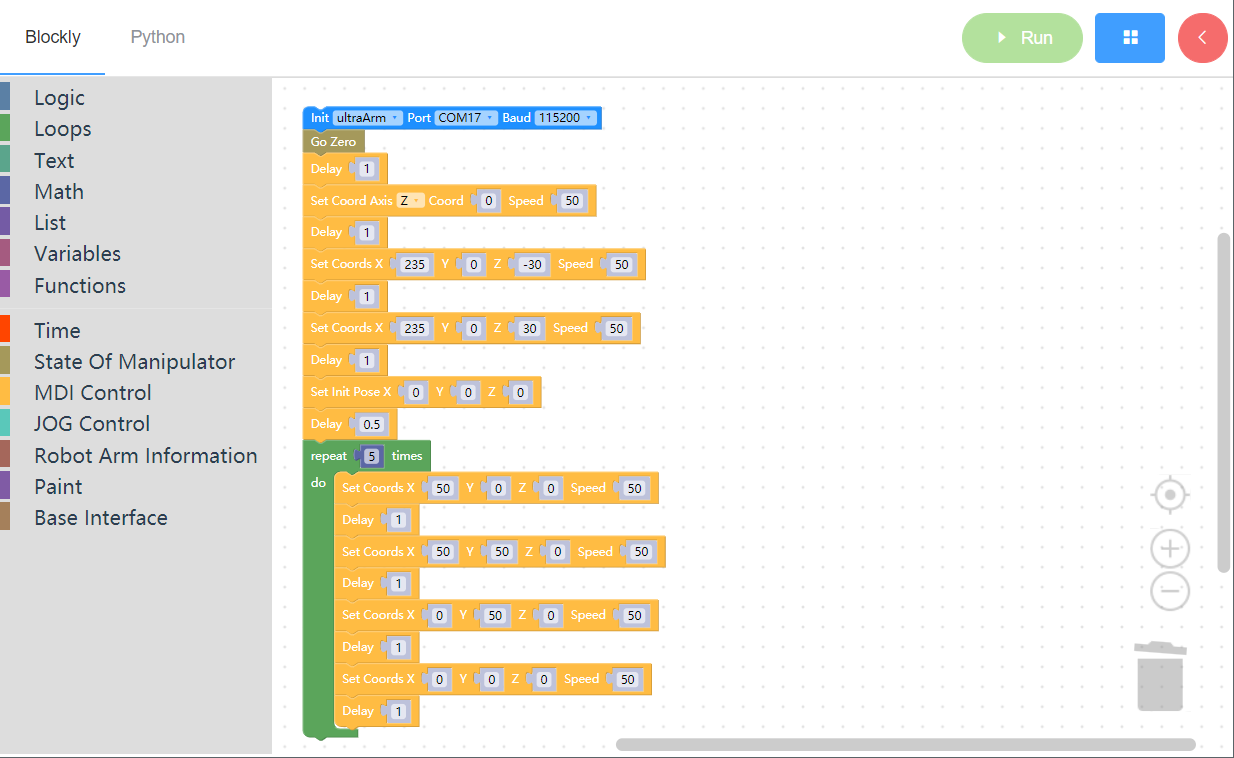
Realize action: the mechanical arm returns to zero. After a delay of 1 second, the Z-axis moves to 0 at a speed of 50. After 1 second, the Z-axis moves to - 30 at a speed of 50. After 1 second, the Z-axis moves to 30 at a speed of 50. After 1 second, the Z-axis moves to 0 at a speed of 50. After 1 second, the current position is set to zero. After 0.5 second, the zero point is repeated for five times to draw 50 × 50 Rectangle action.