mechArm pi 270

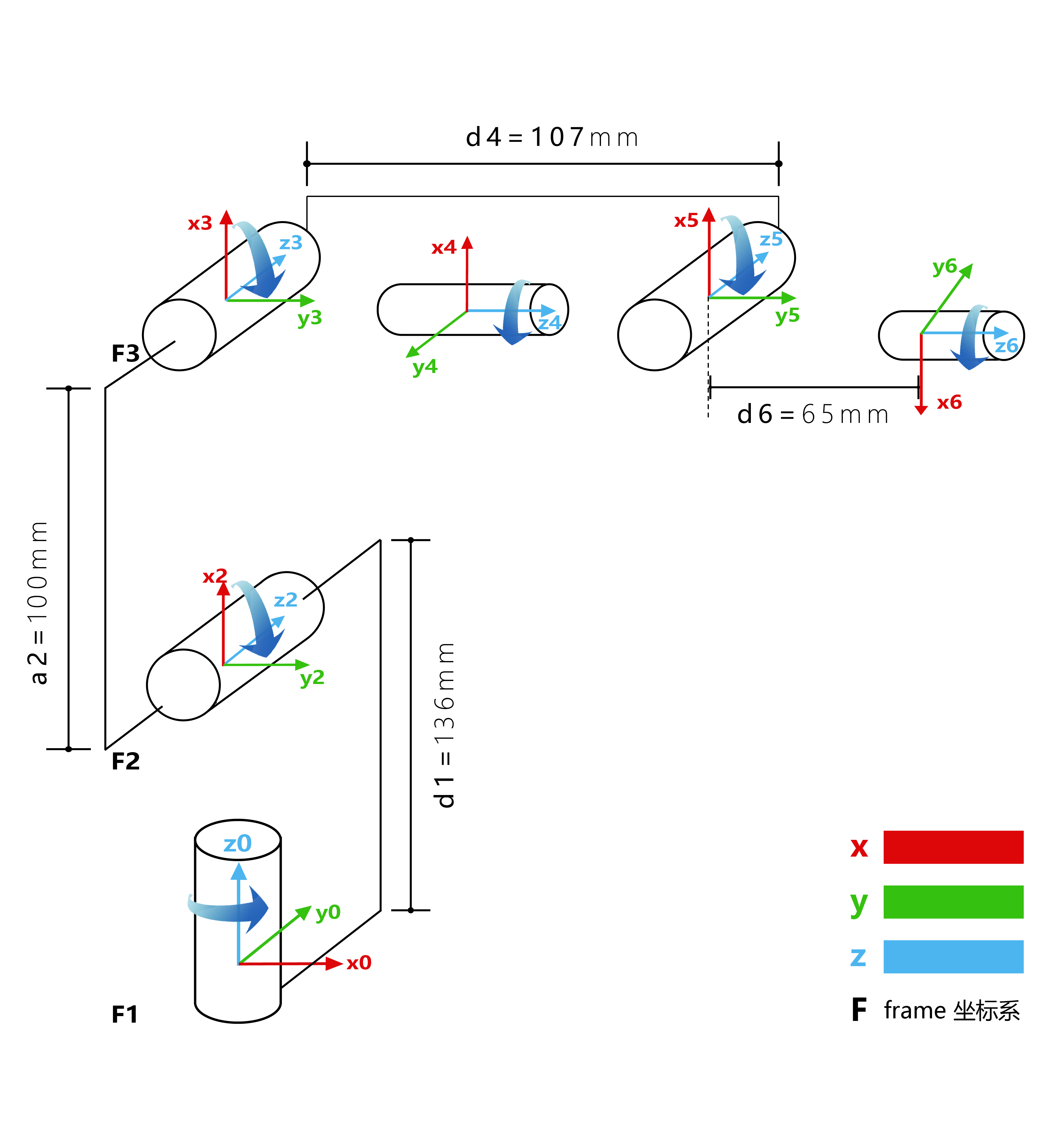
1 Structural parameters
1) Robot arm parameters
| Indicator | Parameter |
|---|---|
| Name | Elephant small six-axis robotic arm |
| Model | mechArm Pi 270 |
| Degree of freedom | 6 |
| Repeated Positioning Accuracy | ±1 mm |
| Load | 250g |
| Dead weight | 1kg |
| Effective working radius | 270mm |
| Power input | 8-12V 5A |
| Motor type | High-precision magnetic encoder motor * six |
| Movement maximum speed | 120°/s |
| Controller | Raspberry Pi4B |
2)Scope of work

3)Range of motion of joints
| joint | scope |
|---|---|
| J1 | -160 ~ +160 |
| J2 | -85 ~ +90 |
| J3 | -180 ~ +45 |
| J4 | -160 ~ +160 |
| J5 | -100 ~ +100 |
| J6 | -∞ ~ +∞ |
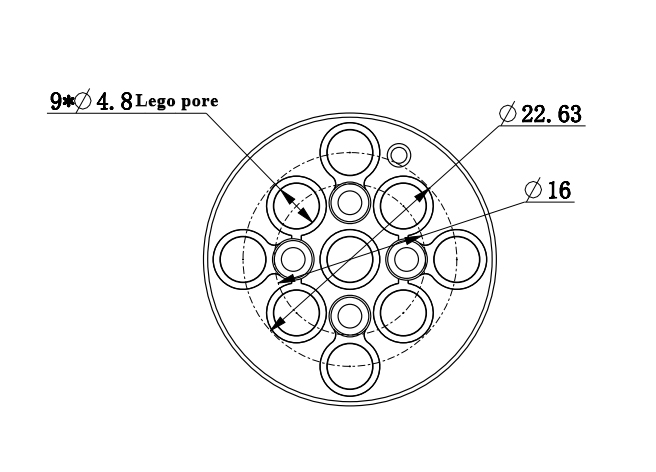
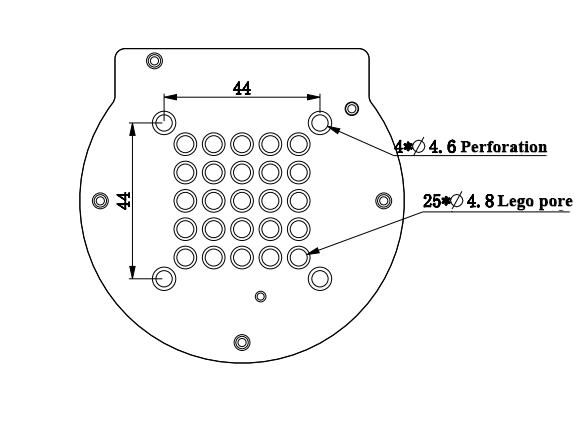
4) Hole installation
- The Robot Base Mounting Flange Base supports the installation of LEGO components.
- Robot end mounting flange The end of the robot arm supports the installation of LEGO components.