Gripper control
Installing the gripper:
- For an adaptive gripper, insert it on the pin on the atom, as shown in the following figure:

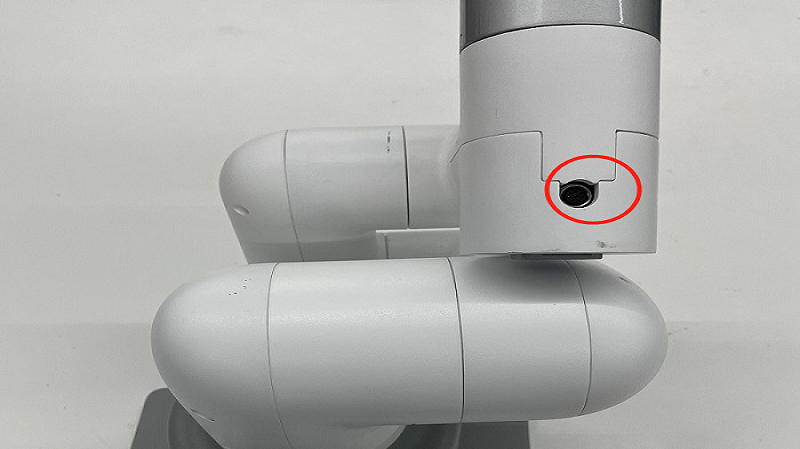
- For an electric gripper, insert it into the 485 interface on the top, as shown in the following figure:
Notice: myCobot280 and myPalletizer 260 have no electric gripper, only myCobot320 has an electric gripper.
1 Adaptive gripper control
supports:myCobot280, 320&&myPalletizer 260
1.1 setGripperValue(byte angle, byte speed)
Return value: none
Parameter description: Parameter 1: gripper opening and closing angles (ranging from 0 to 100; 0–closed; 100-maximum open angle); Parameter 2: gripper opening and closing speeds (0-100)
Case:
mc.setGripperValue(0, 10);
Thread.Sleep(3000);
mc.setGripperValue(50, 100);
Thread.Sleep(3000);
1.2 getGripperValue()
Return value: int type, returning the gripper angle (0 - closed; 100 - maximum open angle)
Parameter description: none
Case:
Console.WriteLine(mc.getGripperValue());
2 Electric gripper control
Available for: myCobot320
2.1 setEletricGripper(int state)
Return value: none
Parameter description: gripper switch state (0-off; 1-on)
Case:
mc.setEletricGripper(0);
3 Complete use cases
using System;
using System.Threading;
namespace Mycobot.csharp
{
class Test
{
static void Main(string[] args)
{
MyCobot mc = new MyCobot("COM57");
mc.Open();
Thread.Sleep(5000);
//set gripper open or close 0--close 100-open max 0-100
mc.setGripperValue(0, 10);
Thread.Sleep(3000);
mc.setGripperValue(50, 100);
Thread.Sleep(3000);
//set electric gripper
mc.setEletricGripper(0);
Thread.Sleep(100);
mc.setEletricGripper(1);
Thread.Sleep(100);
//get gripper state 0--close 1--open
Console.WriteLine(mc.getGripperValue());
mc.Close();
}
}
}