Arduino Environment Building
1 Arduino IDE download
Arduino IDE Download Address
2 Installed drivers
Before burning the program, M5Core host (including M5Stack-basic/GRAY/M5GO/FIRE/FACES) / micro control types of equipment users according to the operating system you are using, please download the corresponding driver package. After decompressing the package, select the installation package of the corresponding OPERATING system bit.
For Mac OS, ensure correct settings of the system Preferred settings --> Security and privacy --> General before installation, and allow the user to get it from App Store or an approved developer.
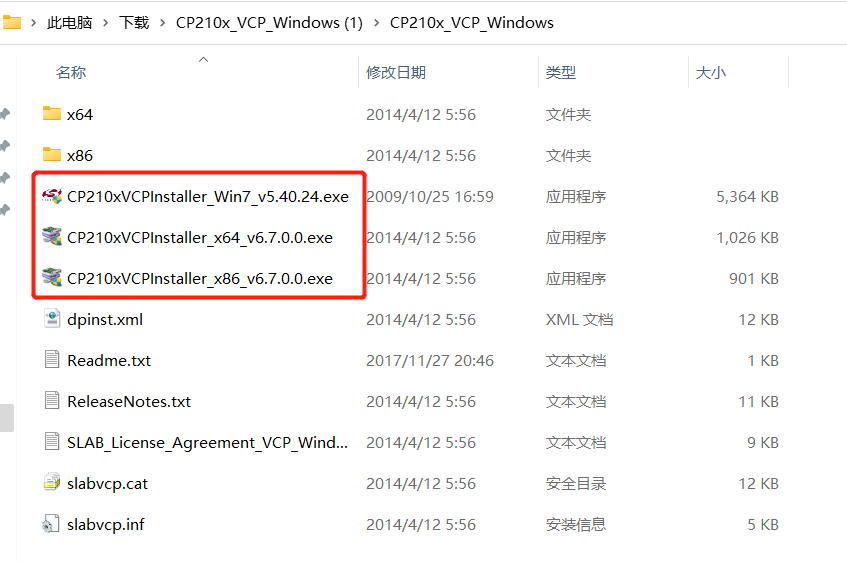
Download the M5Stack-basic serial port driver CP210X or CP34X
CP210X
After extracting the zip package, select the corresponding installation package to install according to your computer operating system (win10 and win11 select x64 or x86 for installation).
CP34X
3 Add board
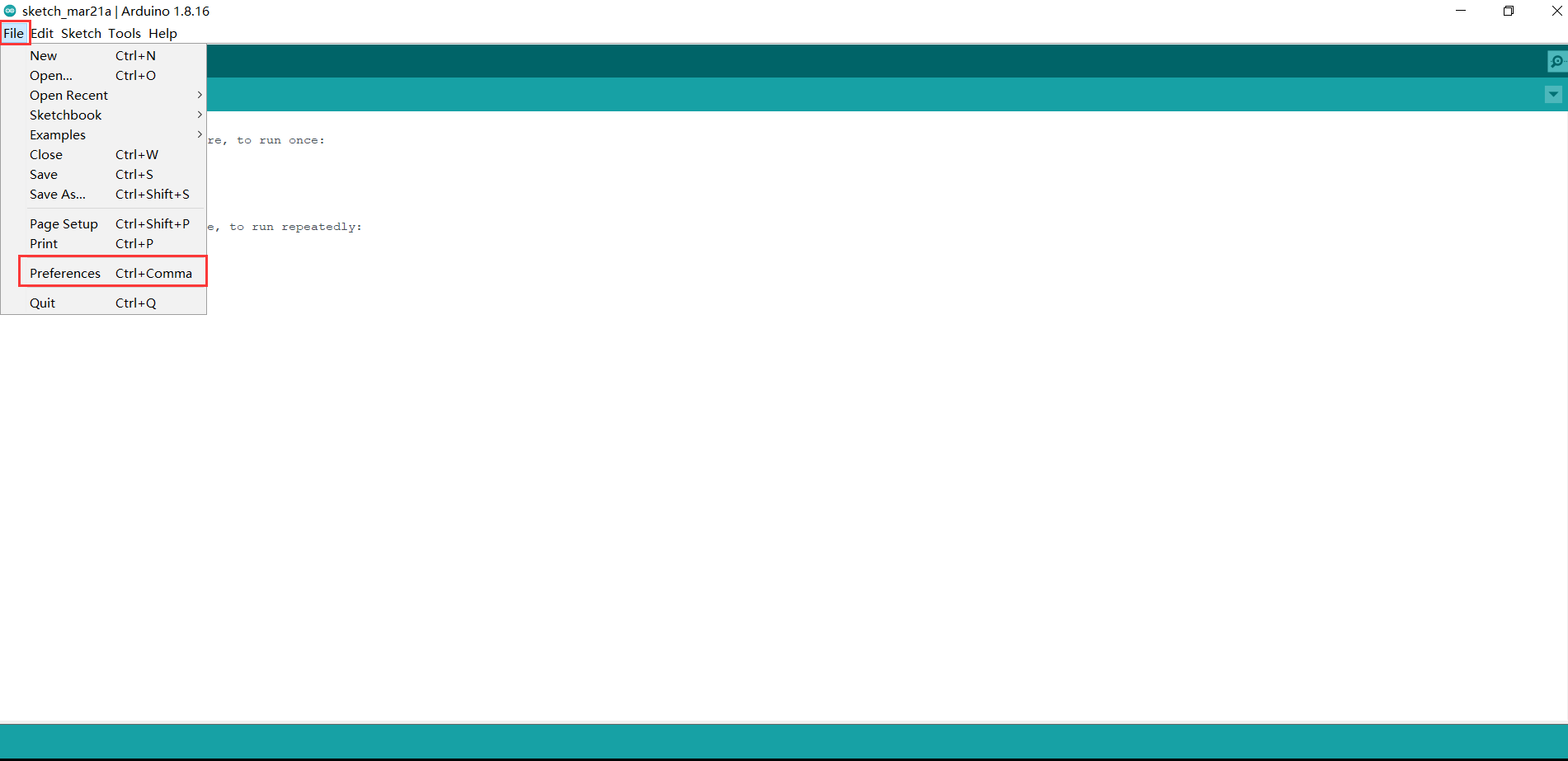
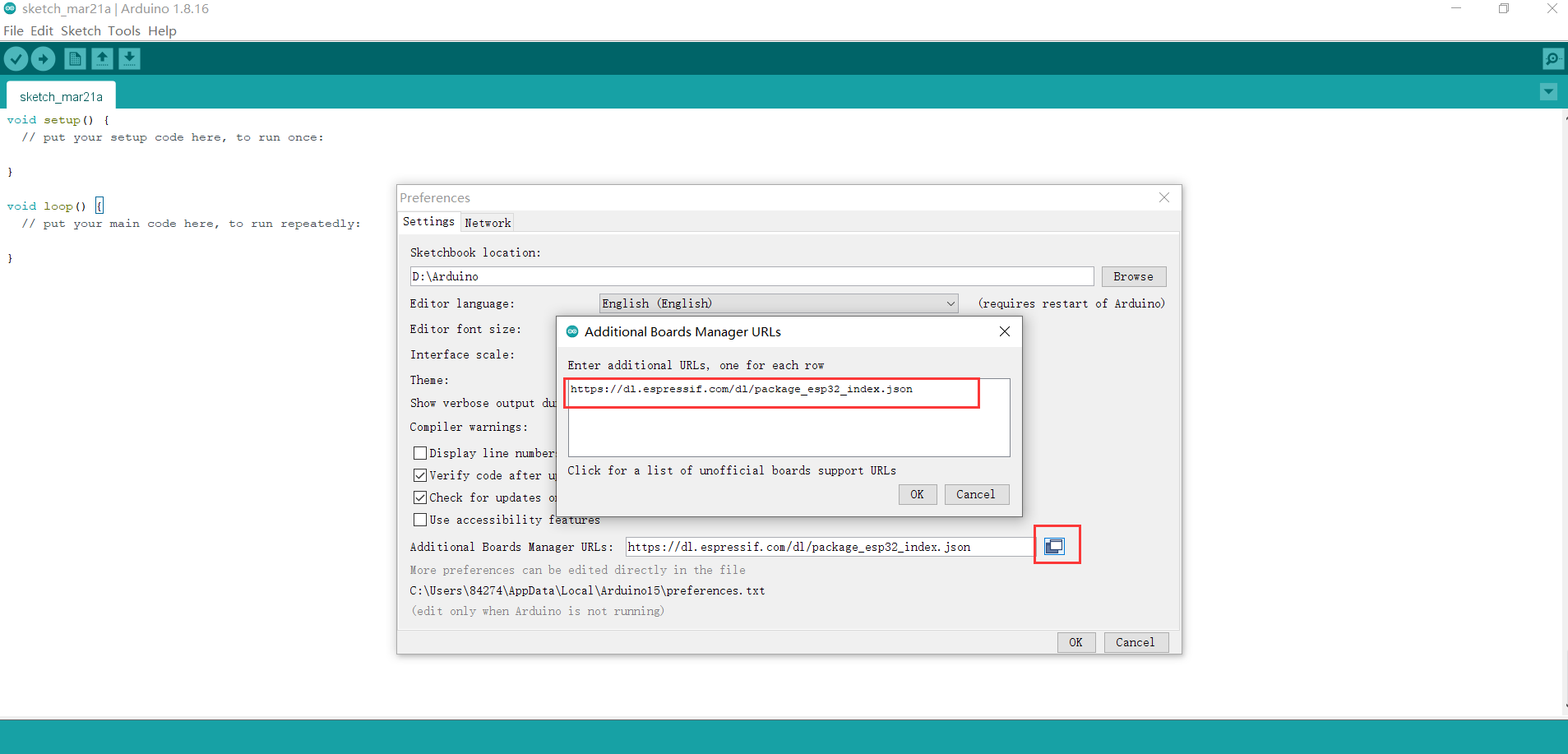
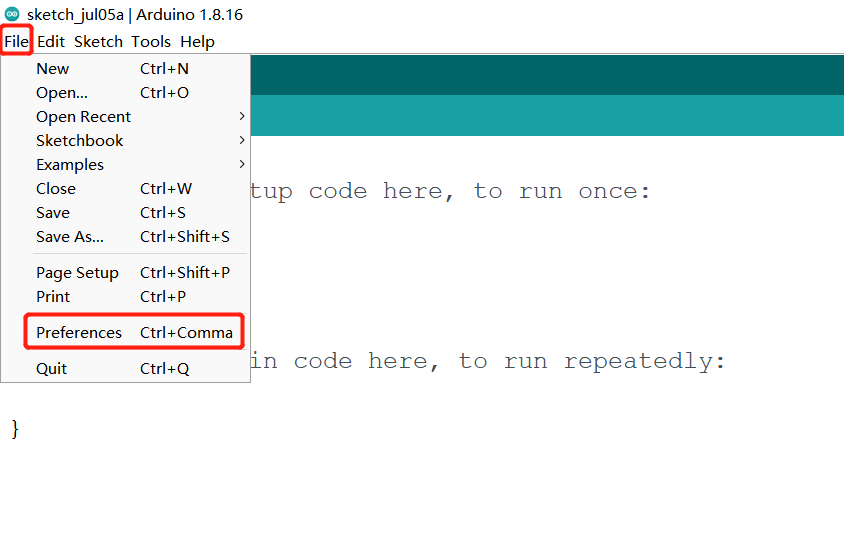
- Open the Arduino IDE and select File --> Preferences --> Settings to add the url address below to the additional board manager https://m5stack.oss-cn-shenzhen.aliyuncs.com/resource/arduino/package_m5stack_index.json
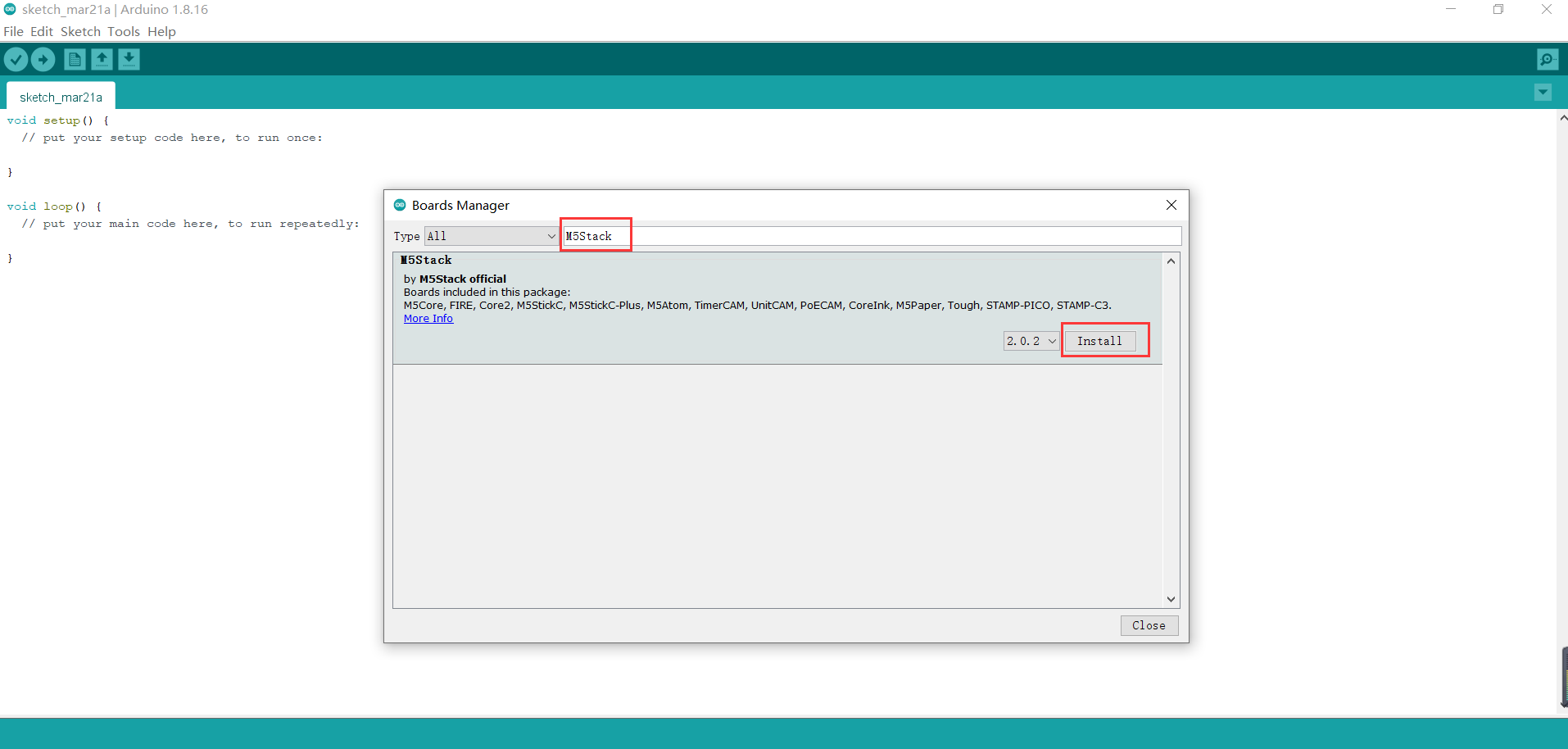
- After adding, select the Tools --> Board --> Boards Manager, in the new pop-up dialog, input and search M5Stack , click Install (in case of search failure, you can try to restart Arduino program), as shown below:
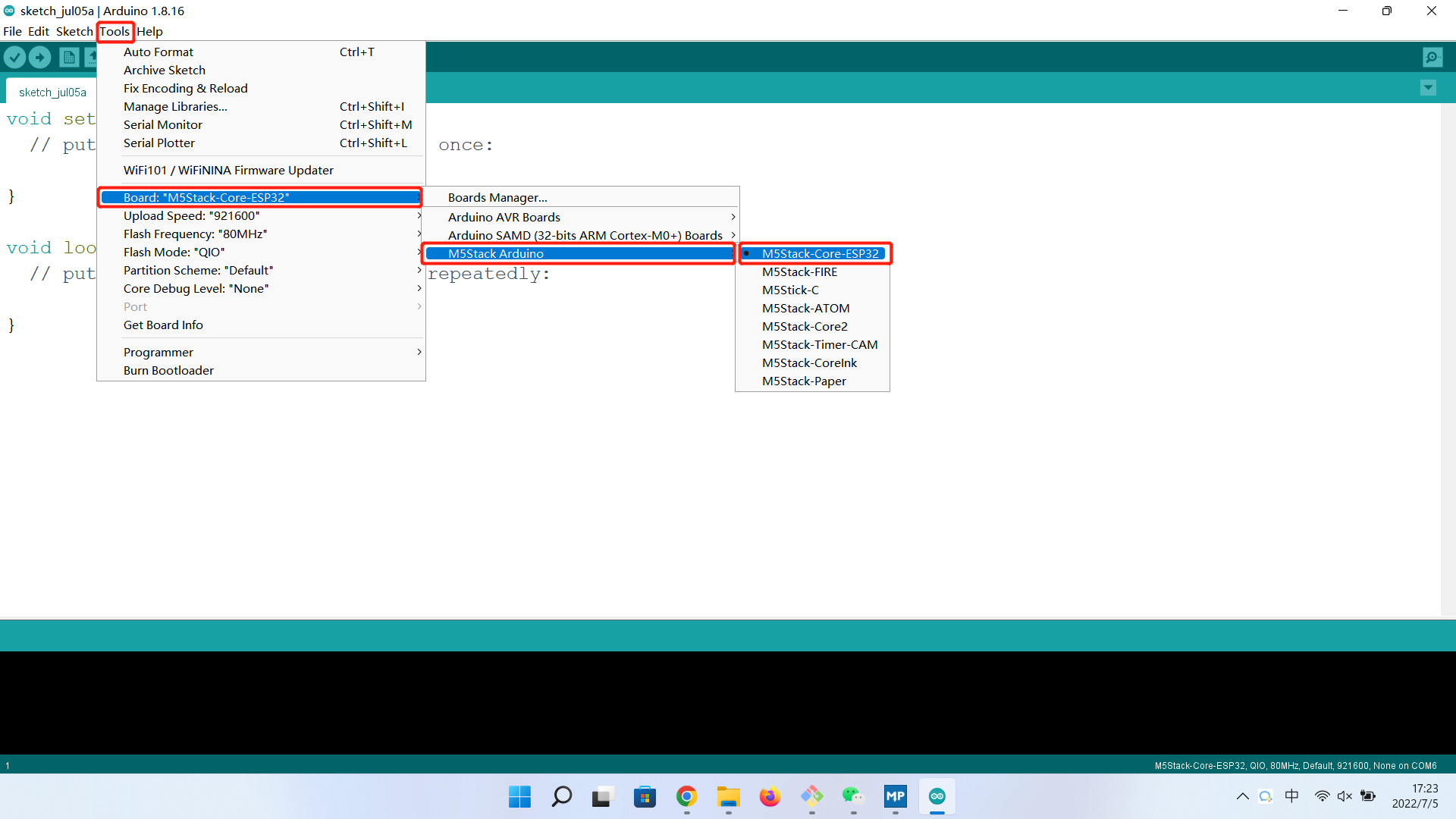
- After adding, select Tools --> Board, check whether it is successful, as shown below:
4 Add related libraries
4.1 Install the M5Stack library
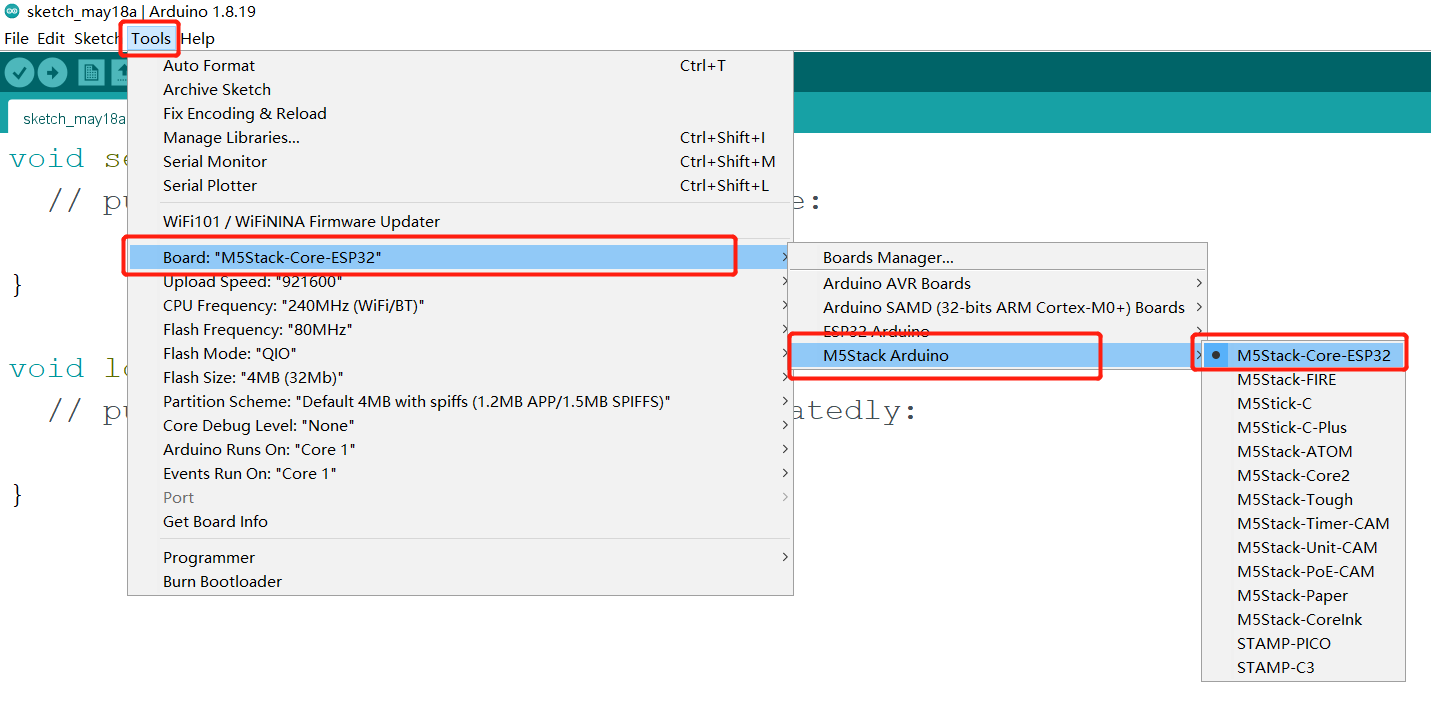
Tools --> Development Board --> M5Stack Arduino select M5Stack-Core-ESP32, as shown in the following figure:
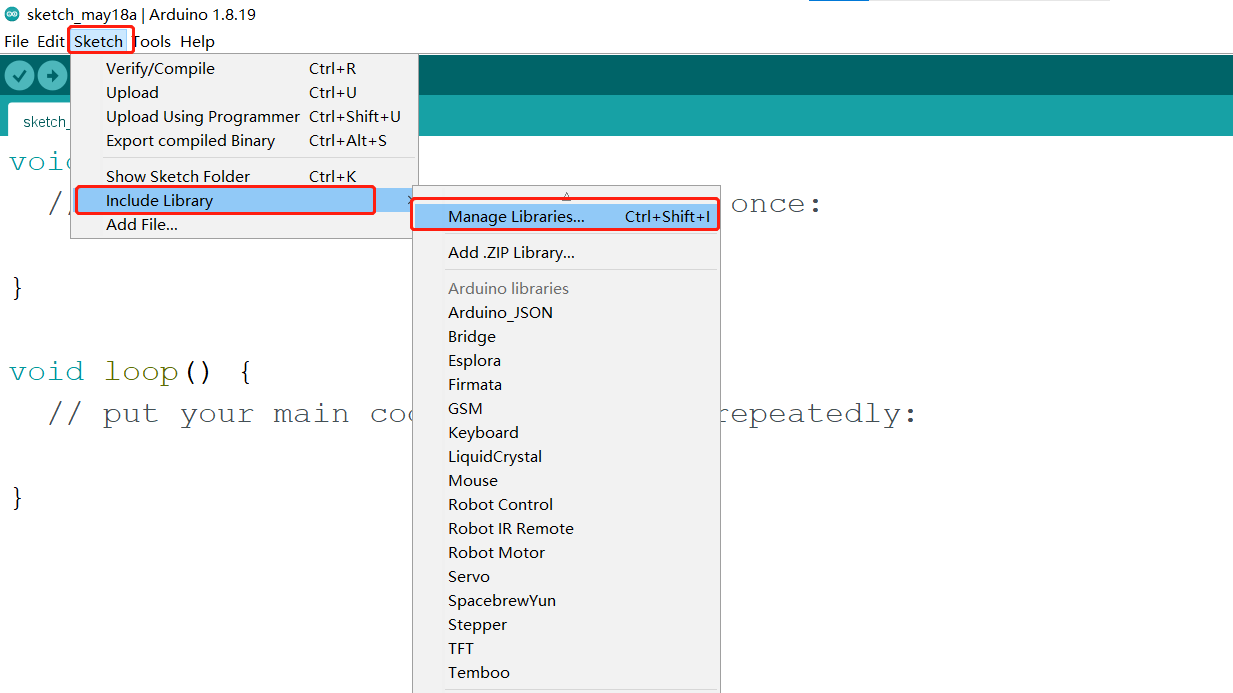
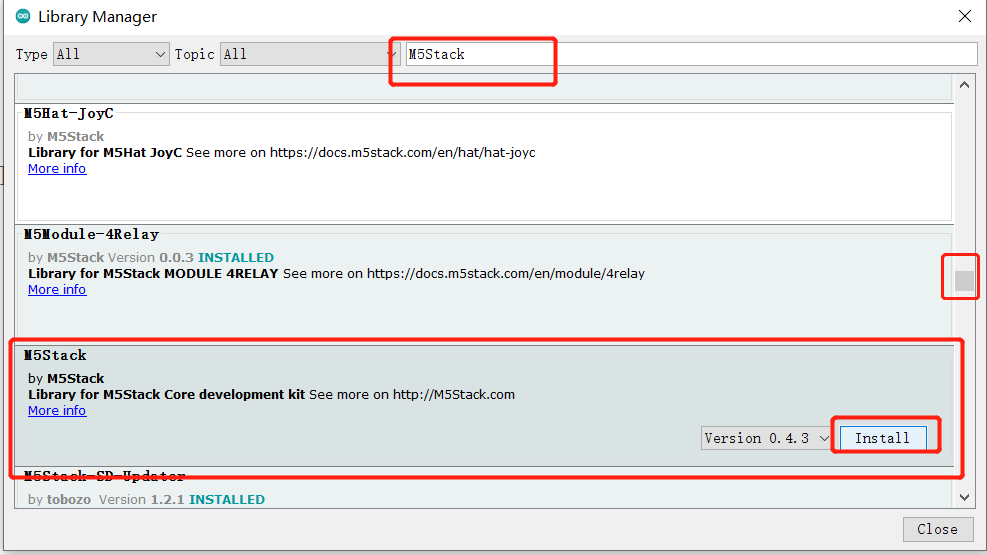
Project --> Load Library --> Manage Library In the search box, enter M5Stack, as shown in the figure below:
After finding it, click Install, scroll down, M5Stack is at the back, you can see the location of the drop-down slider in the picture for details, as shown in the figure below:
4.2 Install the MyCobotBasic library
Note: Different devices add different device-related libraries.
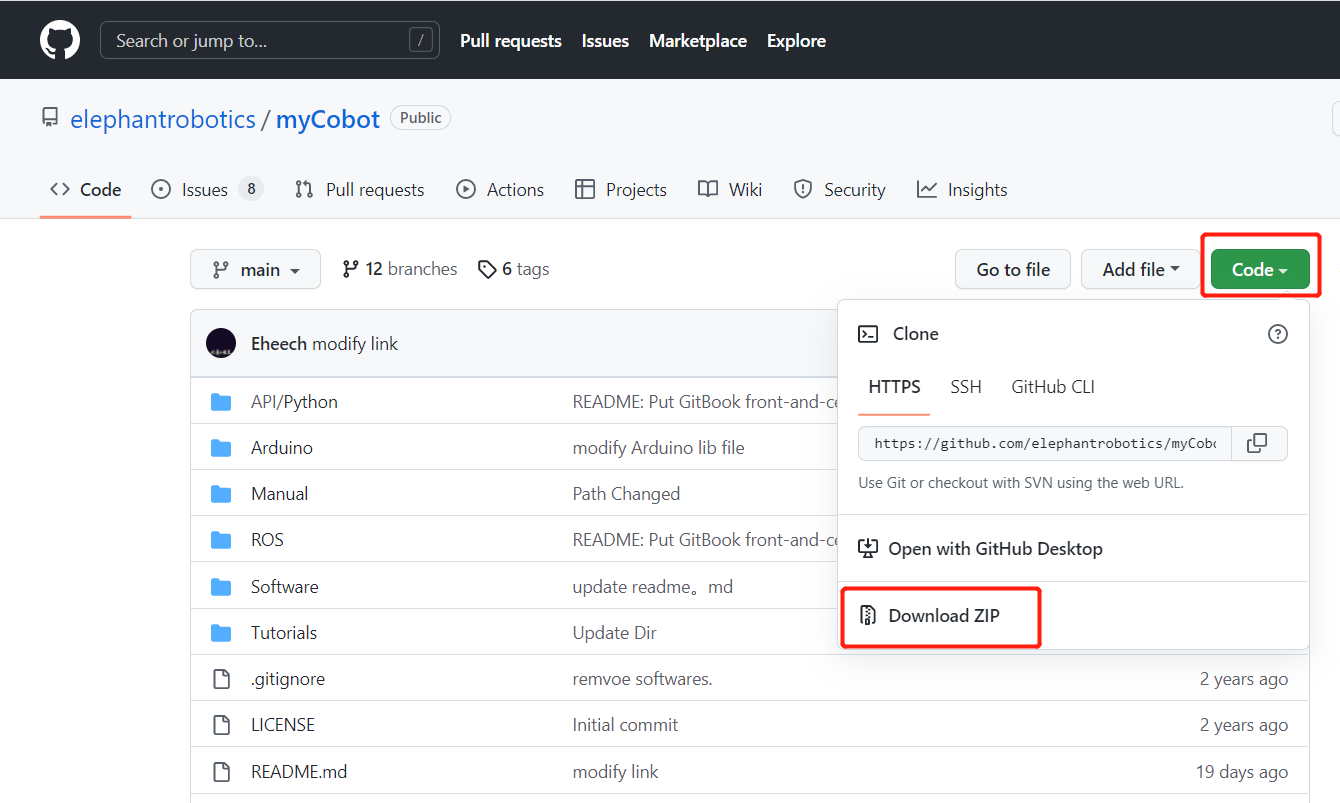
Click to download the dependent libraries
myCobot 280-M5 / mechArm 270-M5 :MycobotBasic.zip (After downloading, unzip myCobot-main\myCobot-main\MyCobotBasic under Arduino into the corresponding libraries directory, and you can refer to the installation instructions of the dependencies.)
myCobot 280-Arduino :MycobotBasic.zip( After importing, you can refer to 10.3-arduinolib_use for use )
myCobot 320-M5 :MycobotBasic.zip
myPalletizer 260 :myPalletizer.zip( Temporarily share the same MycobotBasic.zip with myCobot 280-M5 )
Compile the required libraries for the myCobotbasic project :MycobotBasiclib.zip (All devices need to be installed! Unzip all the contents of the package into the corresponding folder libraries, refer to the installation instructions of the dependency library)
Library Installation Instructions
First check the location of the Arduino project folder by clicking File --> Preferences (you can copy the path to your hard drive to find the libraries folder)
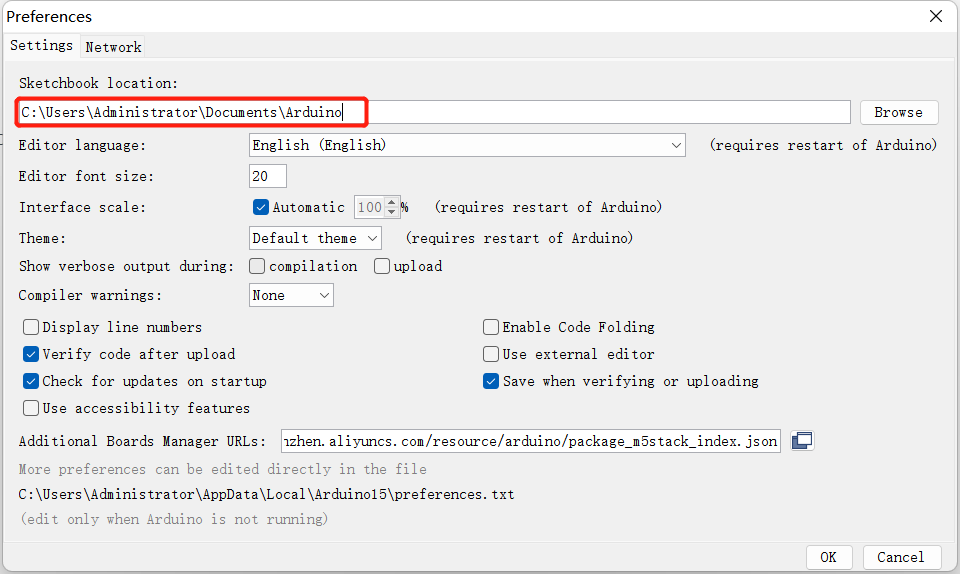
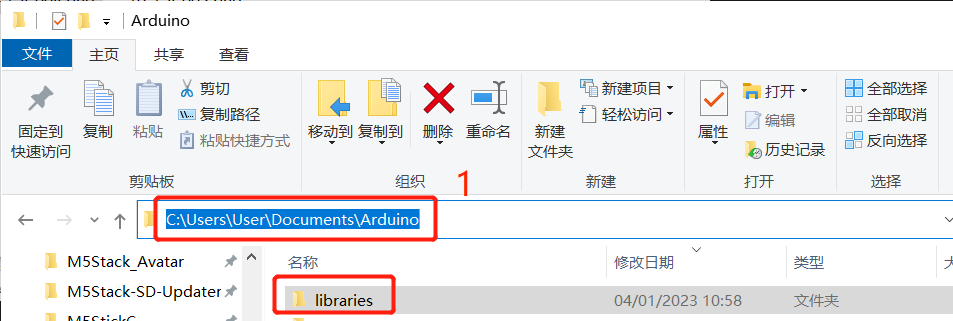
1 Copy the path here and press enter to find the libraries folder
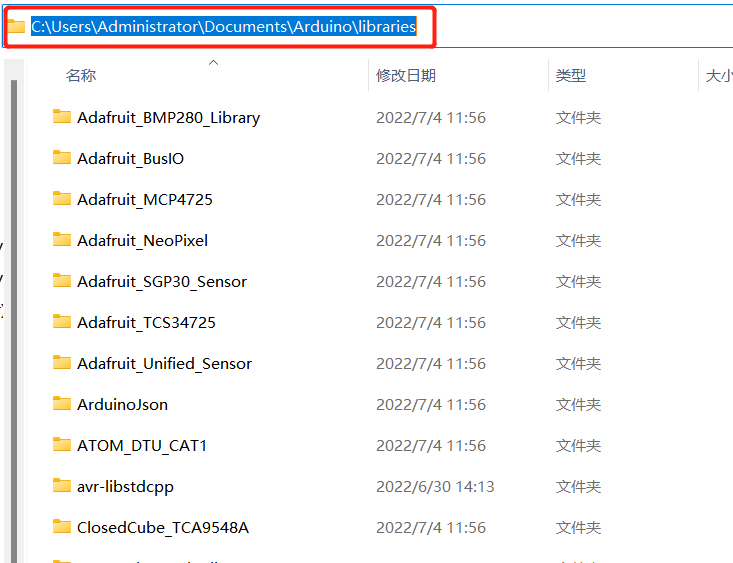
Unzip it into the corresponding folder in the libraries directory. If you are using Arduino, don't overwrite it, just add to the existing Library.
Congratulations, you have built a Arduino related development environment.
Note: Arduino environment configuration and case compilation can be seen in our beep video ( https://www.bilibili.com/video/BV1Vi4y1c7DQ/ ) .