Connection detection
Link test is a detection function that uses the motor in the robot arm and the connection state of Atom. The function allows the user to remove equipment faults easily.
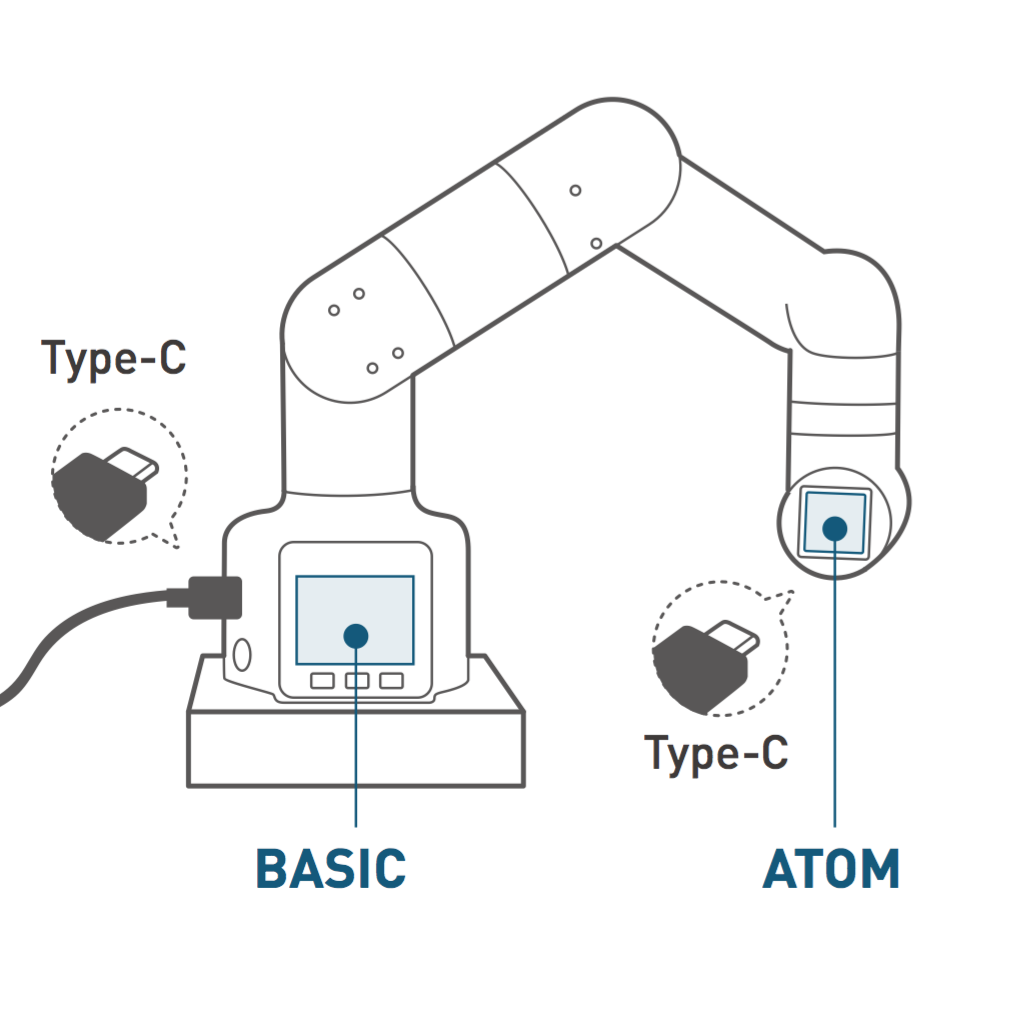
During the link test, the connection state of the equipment for the robot arm, including the connection of the servo and the communication state of Atom can be seen. In micro-controller devices, the versions of their current firmwares are shown on M5Stack-basic.
Different types of devices have different operating methods. They have the approximate steps below:
- Burn the latest version of atomMain for Atom, and the minirobot for M5Stack-basic.
- Choose the Information function (It is unnecessary to burn M5Stack-basic for micro-CPU devices)
- press the detection key to detect the connection of the devices
- press the firmware view key to check the version of the current firmware
- press the exit button to exit this function.
In this chapter, we will learn how to use the detection function for different types of devices.