Calibration
1Applicable Robotic Arms
- myCobot 280 M5
- myCobot 320 M5
- myPalletizer 260 M5
- mechArm 270 M5
2 Steps to Operate the Arm
Step 1: Burn the latest atomMain for Atom.
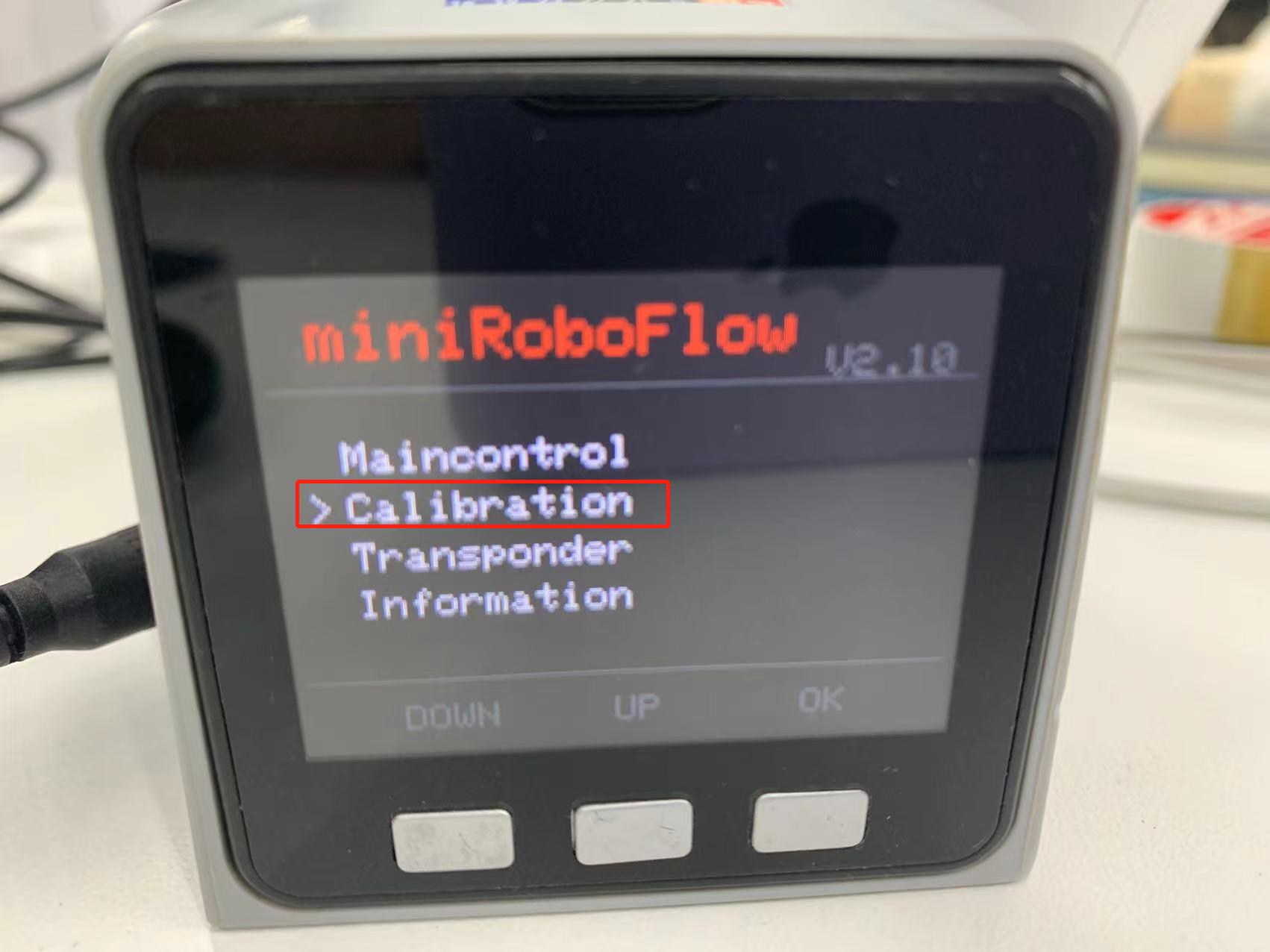
Step 2: Burn the minirobot for M5Stack-basic, and press Calibration.
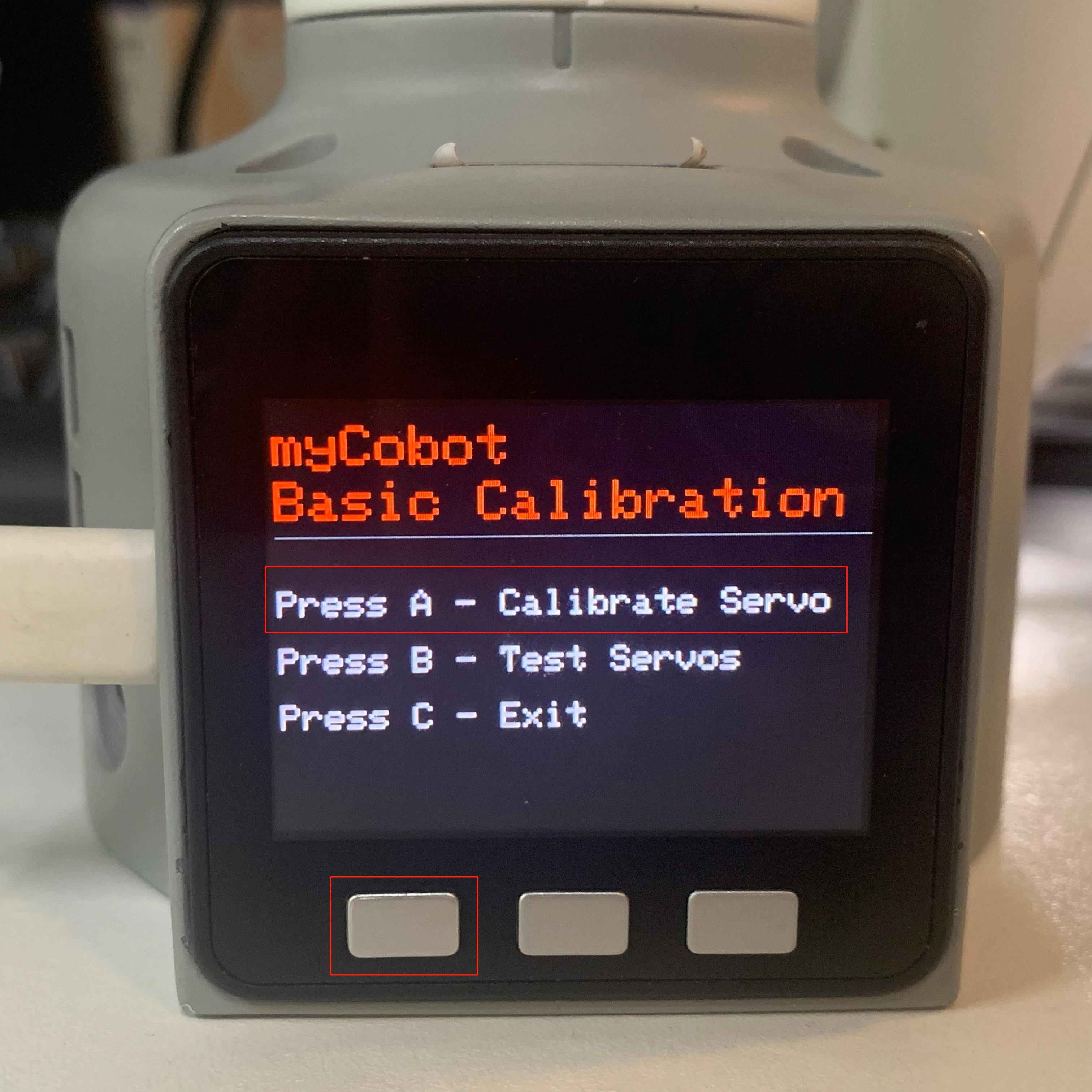
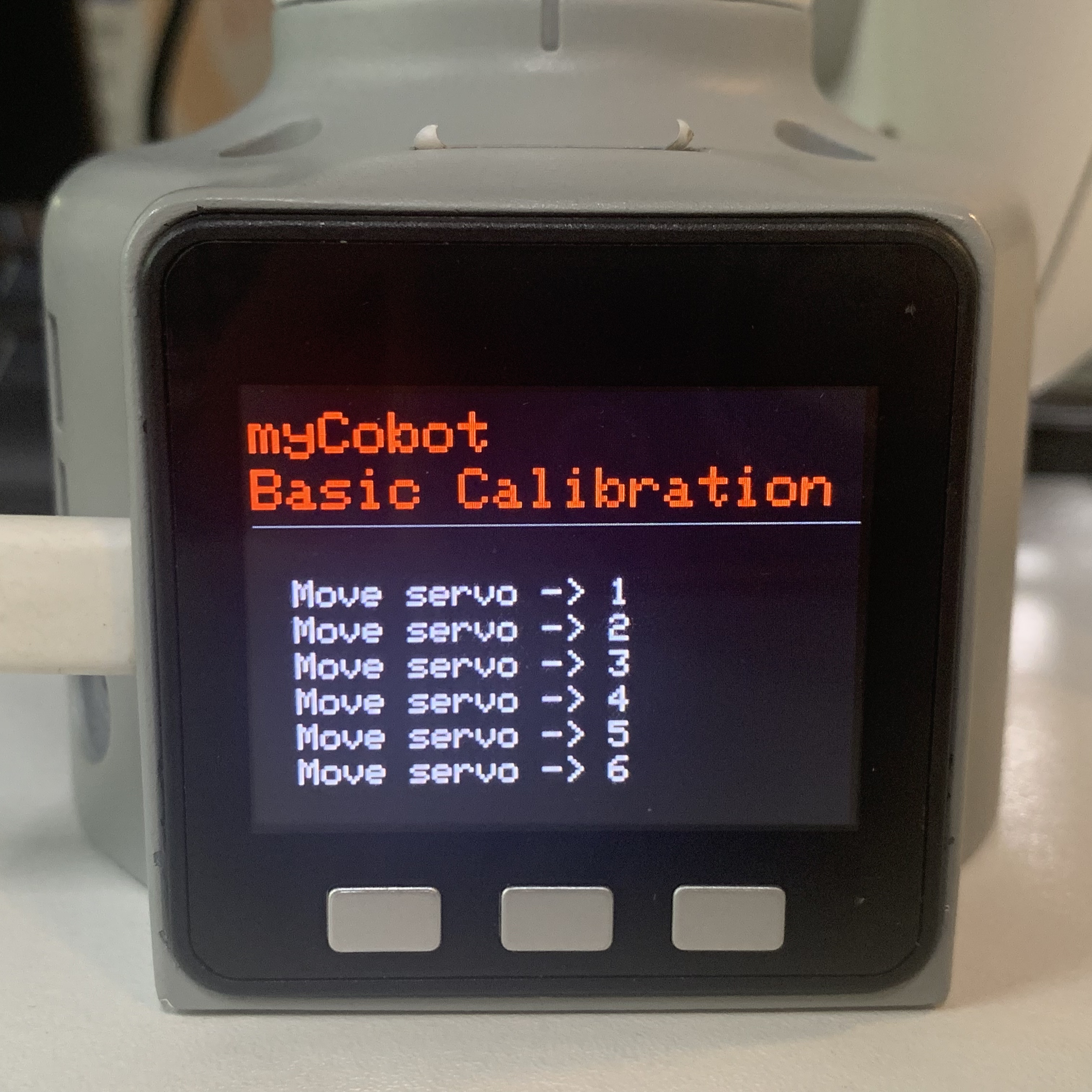
Step 2: Press A to start robot arm calibration.
Step 3: Align each joint with zero-position line in sequence.

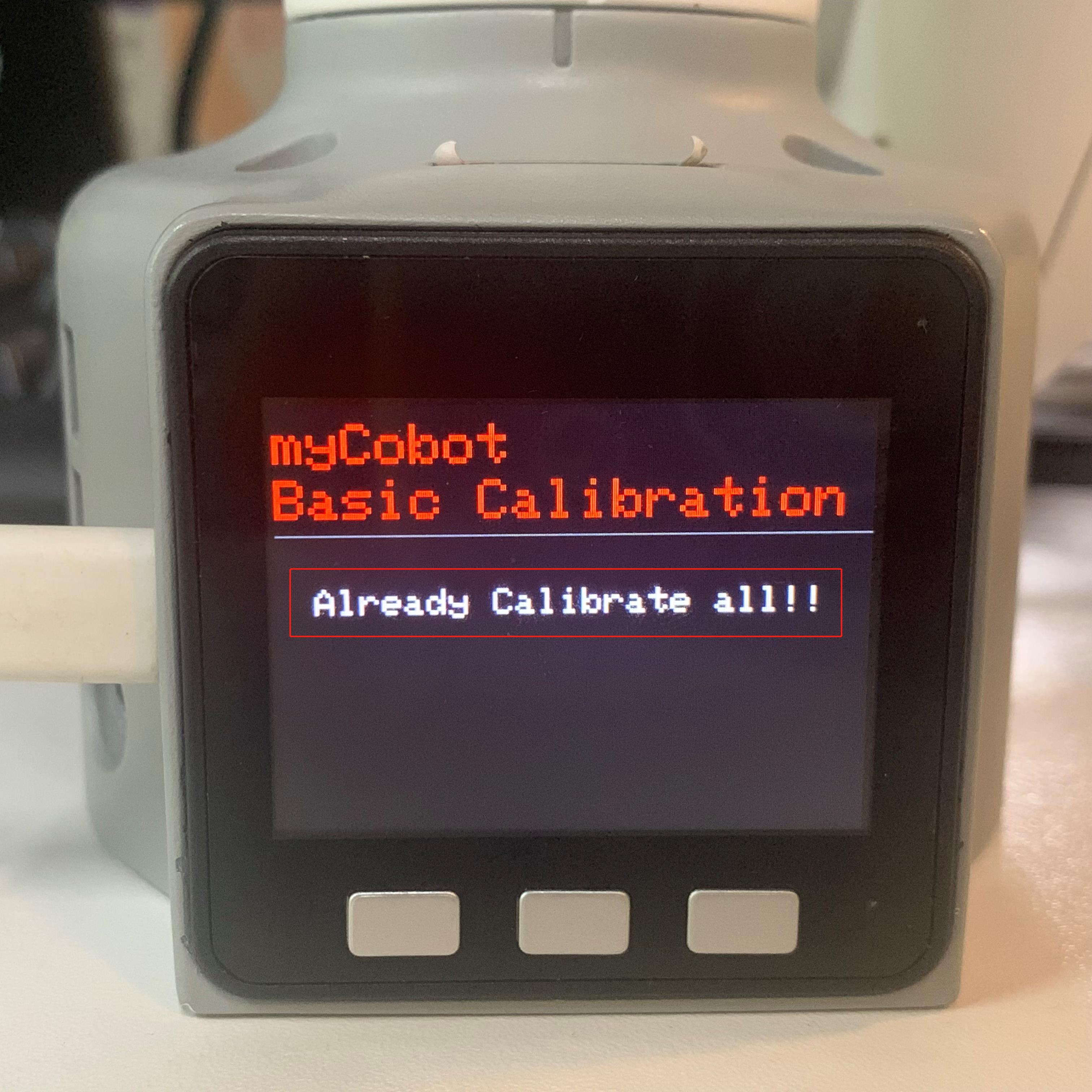
Step 4: After finishing calibrating all joints, a signal Already Calibrate all !! emerges on the screen.
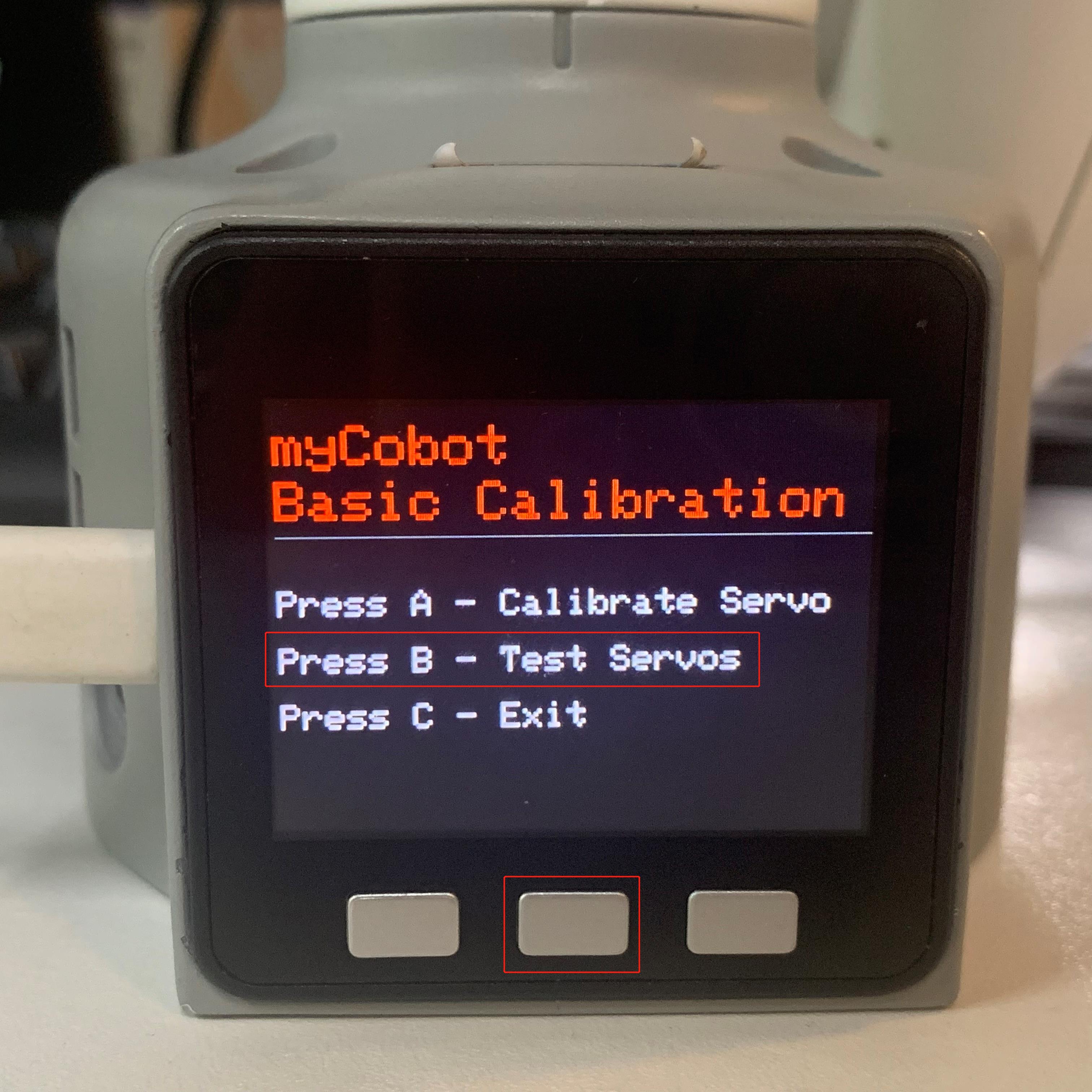
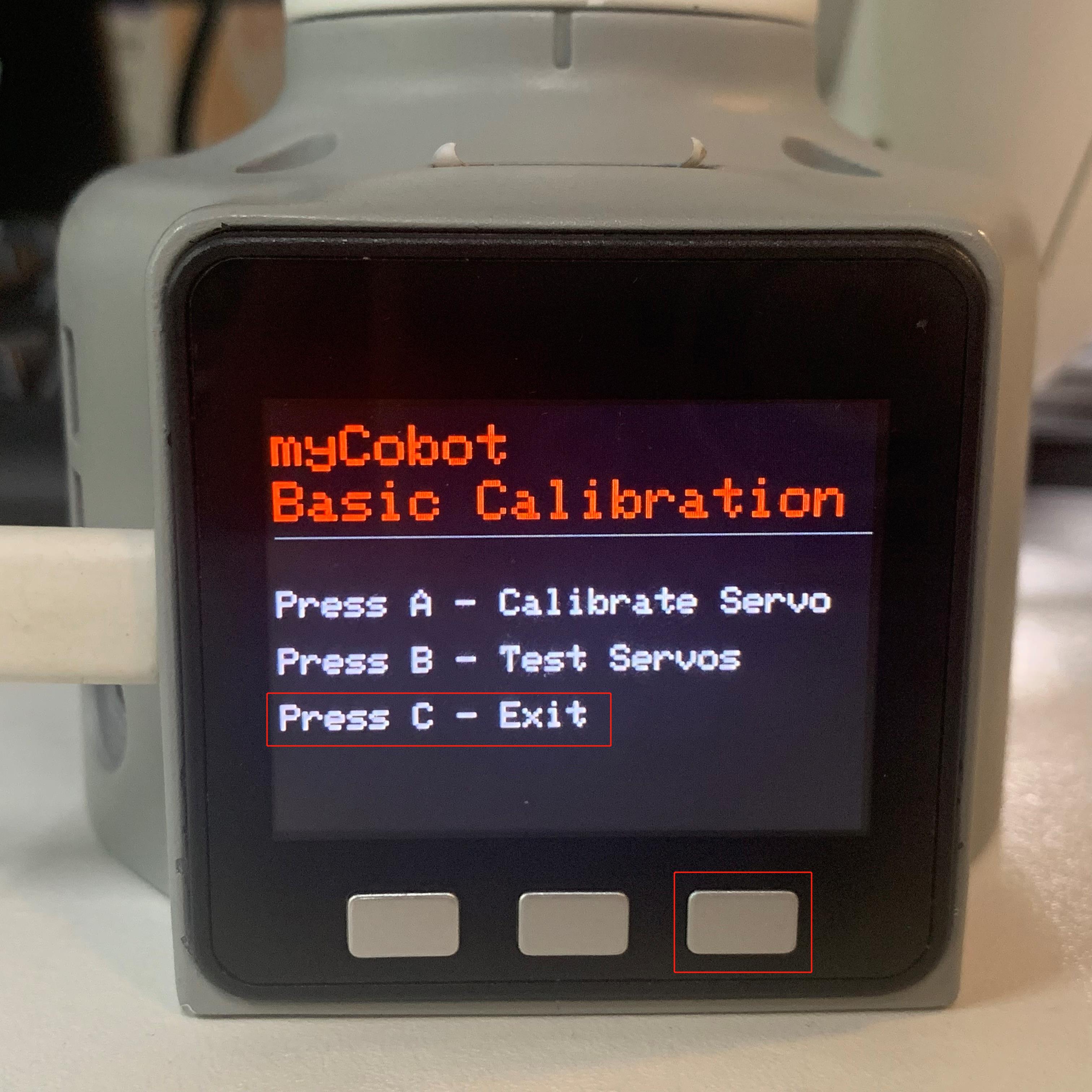
Step 5: Press EXIT to stop calibration and then press B to test the zero positions of all joints.
Step 6: Press C to exit this function. Calibration completes.
3 Tutorial Video
Video Address: https://www.bilibili.com/video/BV1FT4y1P7BV/