MoveIt
1 Introduction to MoveIt
MoveIt is an integrated development platform in ROS, which consists of a variety of functional packages for manipulating robot arms, including motion planning, operation, control, inverse kinematics, 3D perception, collision detection, etc.
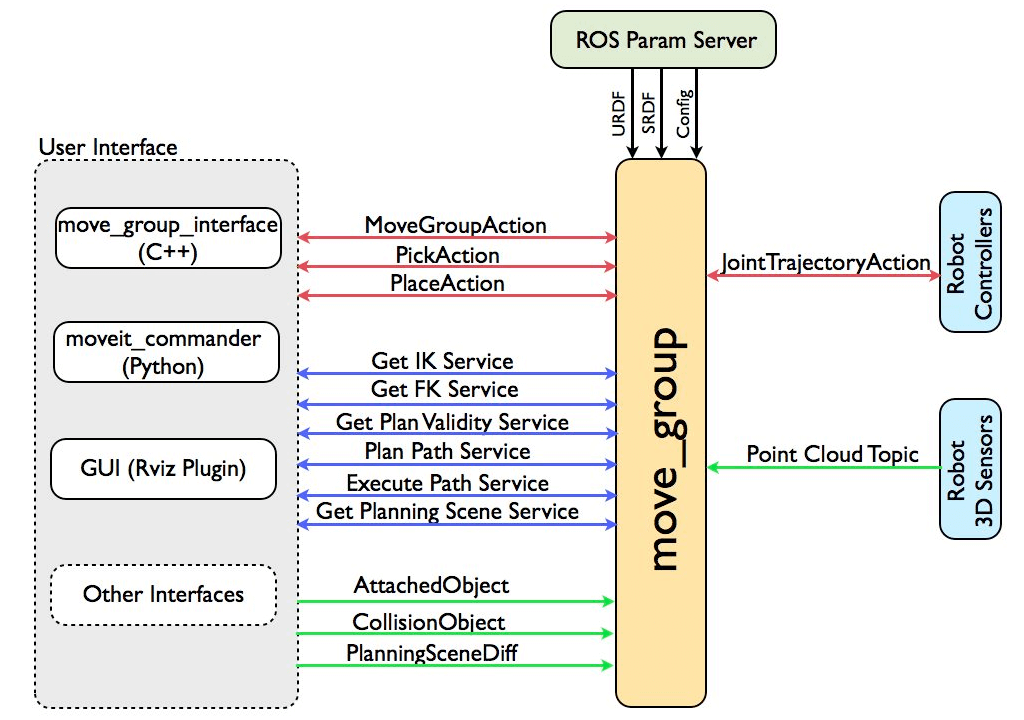
The following figure shows the high-level structure of the main node move_group provided by Moveit. It is like a combiner: all the individual components are integrated together, providing a series of actions and services for users to use.
2 User interface
The user may access the operations and services provided by move_group in three ways:
- In C++, you may use move_group easily by using move_group_interface package.
- In Python, use the moveit_commander package.
- Via GUI: use Rviz (ROS visualization tool) of Motion-commander.
move_group can be configured using the ROS parameter server, from which the robot's URDF and SRDF can also be obtained.
3 Configuration
move_group is a ROS node. It uses the ROS parameter server to obtain three kinds of information:
- URDF - move_group looks for the robot_description parameter in the ROS parameter server to get the robot's URDF.
- SRDF - move_group looks for the robot_description_semantic parameter in the ROS parameter server to get the robot's SRDF. SRDF is typically created by the user using an MoveIt Setup Assistant.
- MoveIt configuration - move_group will look in the ROS parameter server for additional MoveIt-specific configurations, including joint constraint, kinematics, motion planning, perception, and other information. w The configuration files for these components are automatically generated by the MoveIt Setup Assistant and stored in the configuration directory of the robot's corresponding MoveIt configuration package.