Gripper control
Installing the gripper:
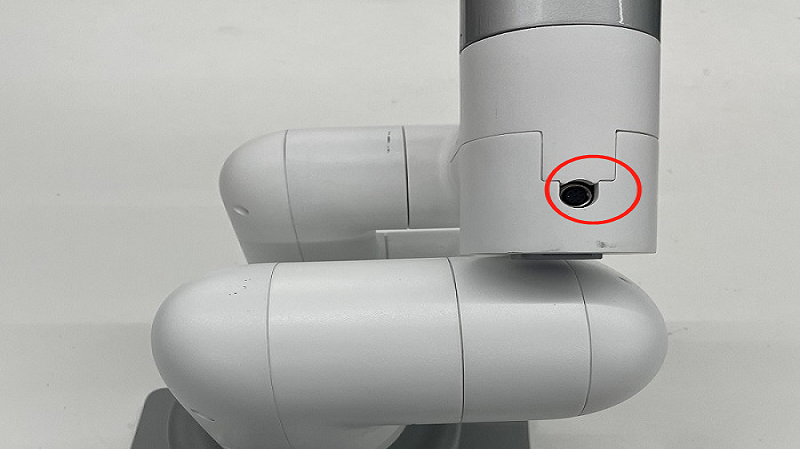
- For an adaptive gripper, insert it on the pin on the atom, as shown in the following figure:
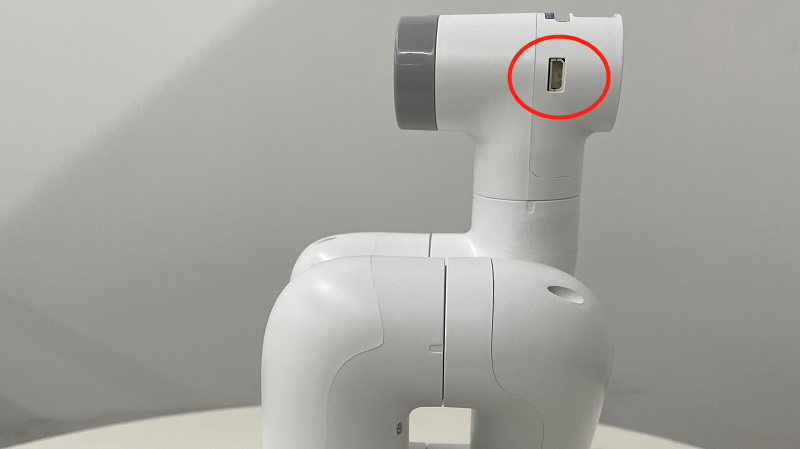
- For an electric gripper, insert it into the 485 interface on the top, as shown in the following figure:
1 The equipment that the adaptive gripper
supports: myCobot280, myCobot320 and myPalletizer 260.
Function description: - Run RoboFlow, enter the program editing interface, and select M5Stack-basic – Gripper (For the way to enter the program editing interface, see 6.2 Simple use of RoboFlow);
- click Define New Gripper, fill in Gripper Name as " CAG-1 ” (must be this name), and then click Save;
- select open or close for Saved status. The overall steps are shown in the following figure:
2 Electric gripper
It supports myCobot320. Function Description:
- Run RoboFlow and select M5Stack-basic – Gripper ;
- click Define New Gripper, fill in Gripper Name as "DH PGE 8” (must be this name), and then click Save;
- select open or close for Saved status. The overall steps are shown in the following figure: