机械臂参数介绍

1 结构参数
1.1 机械臂参数
| 指标 | 参数 |
|---|---|
| 名称 | 大象奥创机械臂 |
| 型号 | ultraArm P340 |
| 自由度 | 3/4 |
| 重复定位精度 | ±0.1 mm |
| 负载 | 650g |
| 自重 | 2.9kg |
| 工作半径 | 340mm |
| 材料 | 铝合金、光敏树脂SLA |
| 电源 | AC100-240V / 50-60Hz |
| 输入电源 | 12V 5A 60W |
| 输出电源 | 12V 8.4V 5V |
| 电机类型 | 高精度步进电机 |
| TCP最大速度 | 100mm/s |
| 机械控制核心 | Mega2560 |
| 通信方式/连接方式 | RS485通讯/USB串口线 |
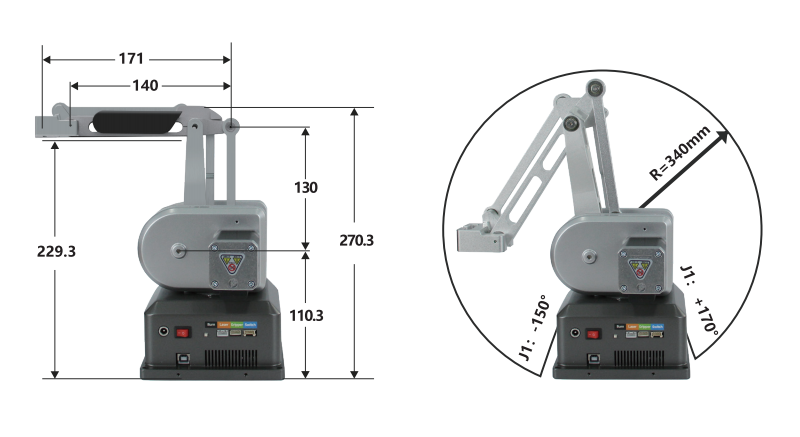
1.2 工作空间
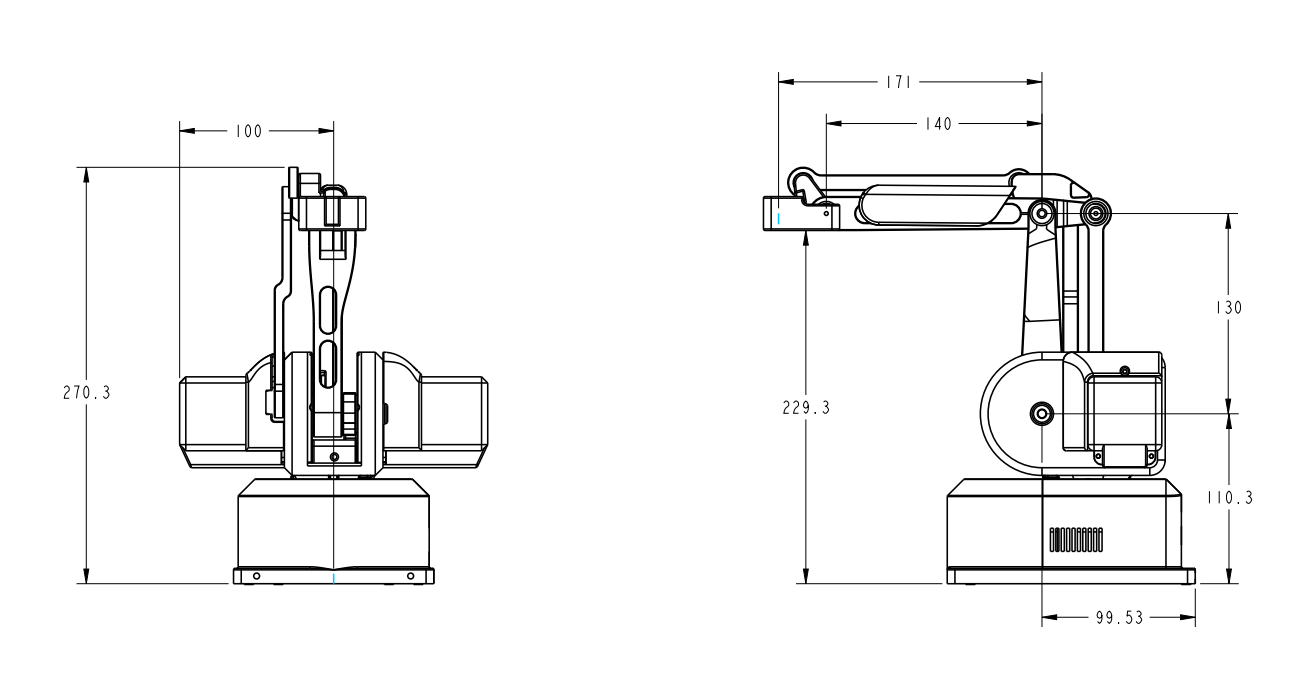
1.3 规格尺寸
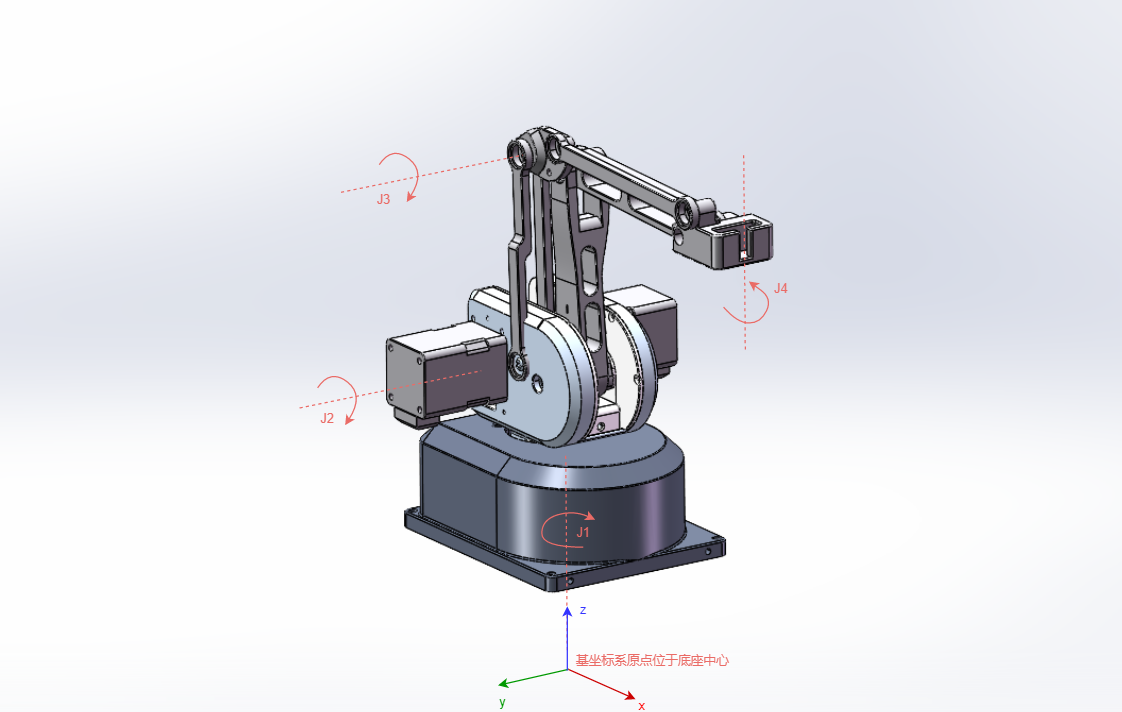
1.4 关节运动范围
| 关节 | 范围 |
|---|---|
| J1 | -150° ~ +170° |
| J2 | -20° ~ +90° |
| J3 | -5° ~ +70° |
| J4(配件) | 无限制 |
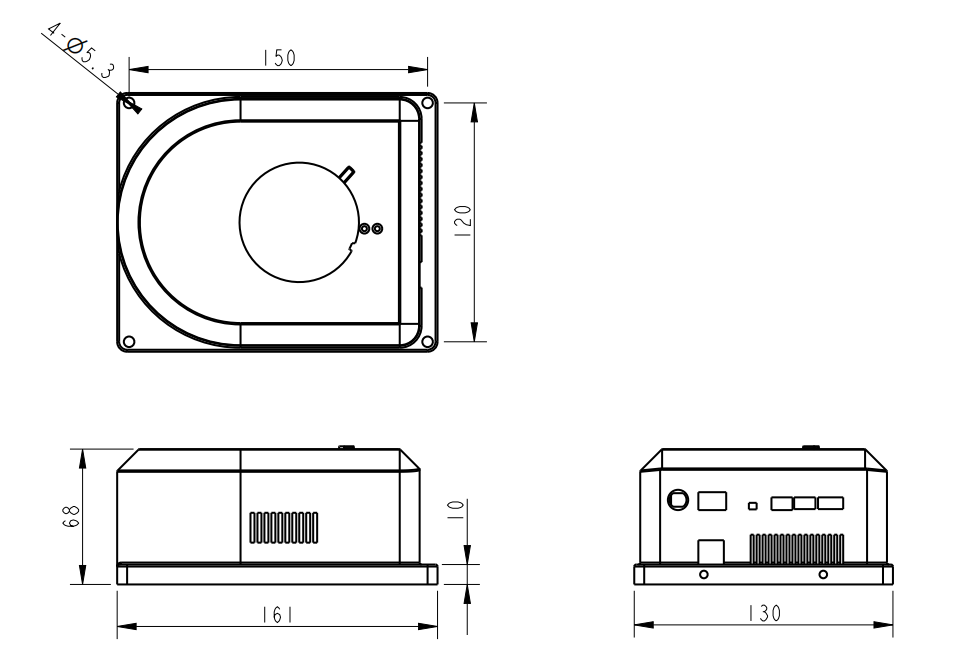
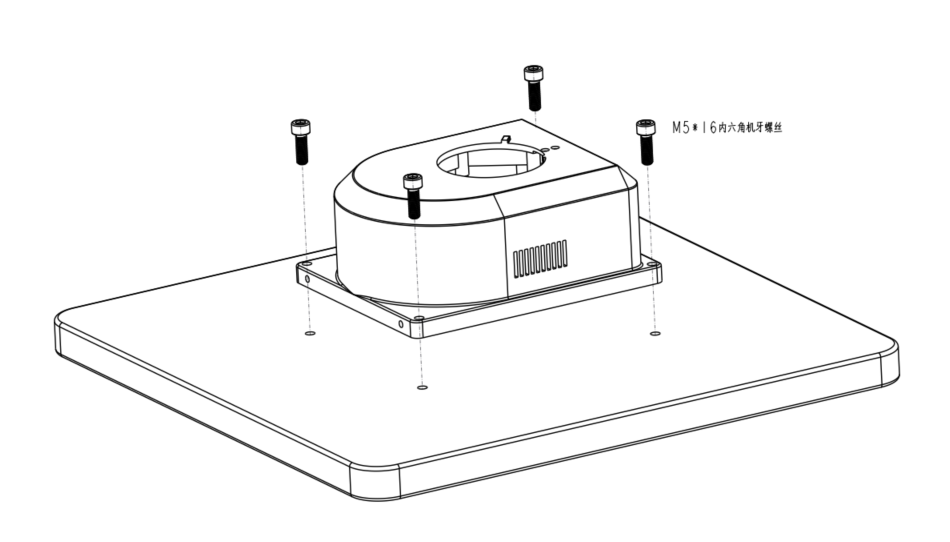
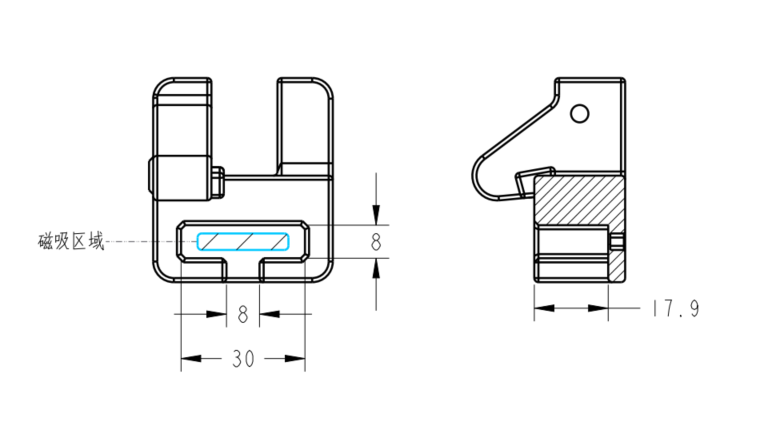
1.5 孔位安装
机器人底座安装
机器人末端安装法兰
1.6 关节与笛卡尔坐标系
2 芯片参数
| 项目 | 参数 |
|---|---|
| 核心参数 | ATMEGA2560-16AU |
| 核心处理器 | AVR |
| 内核位数 | 8位 |
| 频率 | 16MHz |
| 连通性 | EBI/EMI,I2C,SPI,UART/USART |
| FLASH容量 | 256KB (256K x 8) |
| EEPROM 大小 | 4K x 8 |
| RAM 容量 | 8K x 8 |
| 输入/输出数 | 86 |
| 工作温度 | -40°C ~ 85°C |
| 核心型号 | Mega2560 |