rviz2的简单介绍及使用
rviz是ROS中一款三维可视化平台,一方面能够实现对外部信息的图形化显示,另外还可以通过 rviz 给对象发布控制信息,从而实现对机器人的监测与控制。
1 rviz2的简介
ros2安装成功表明rviz2也一起安装成功了,因为ros2的安装包含了rviz2。
打开一个一个新的终端(快捷键Ctrl+Alt+T)输入命令打开rviz2
rviz2
打开rviz2,显示如下界面:

2 各个区域介绍
- 左侧为显示器列表,显示器是在3D世界中绘制某些内容的东西,并且可能在显示列表中具有一些可用的选项。
- 上方是工具栏,允许用户用各种功能按键选择多种功能的工具
- 中间部分为3D视图: 它是可以用三维方式查看各种数据的主屏幕。3D视图的背景颜色、固定框架、网格等可以在左侧显示的全局选项(Global Options)和网格(Grid)项目中进行详细设置。
- 下方为时间显示区域,包括系统时间和ROS时间等。
- 右侧为观测视角设置区域,可以设置不同的观测视角。
本部分我们只进行粗略的介绍,如果您想了解更多详细的内容,可以前往用户指南进行查看。
3 简单使用
通过launch.py文件启动
本例子建立在您已经完成环境搭建,并成功将本公司的代码从GitHub上复制下来的基础上。
打开一个控制台终端(快捷键Ctrl+Alt+T) 输入一下命令进行ROS2的环境配置。
cd ~/colcon_ws
colcon build --symlink-install
source install/setup.bash
再输入:
ros2 launch ultraarm test.launch.py
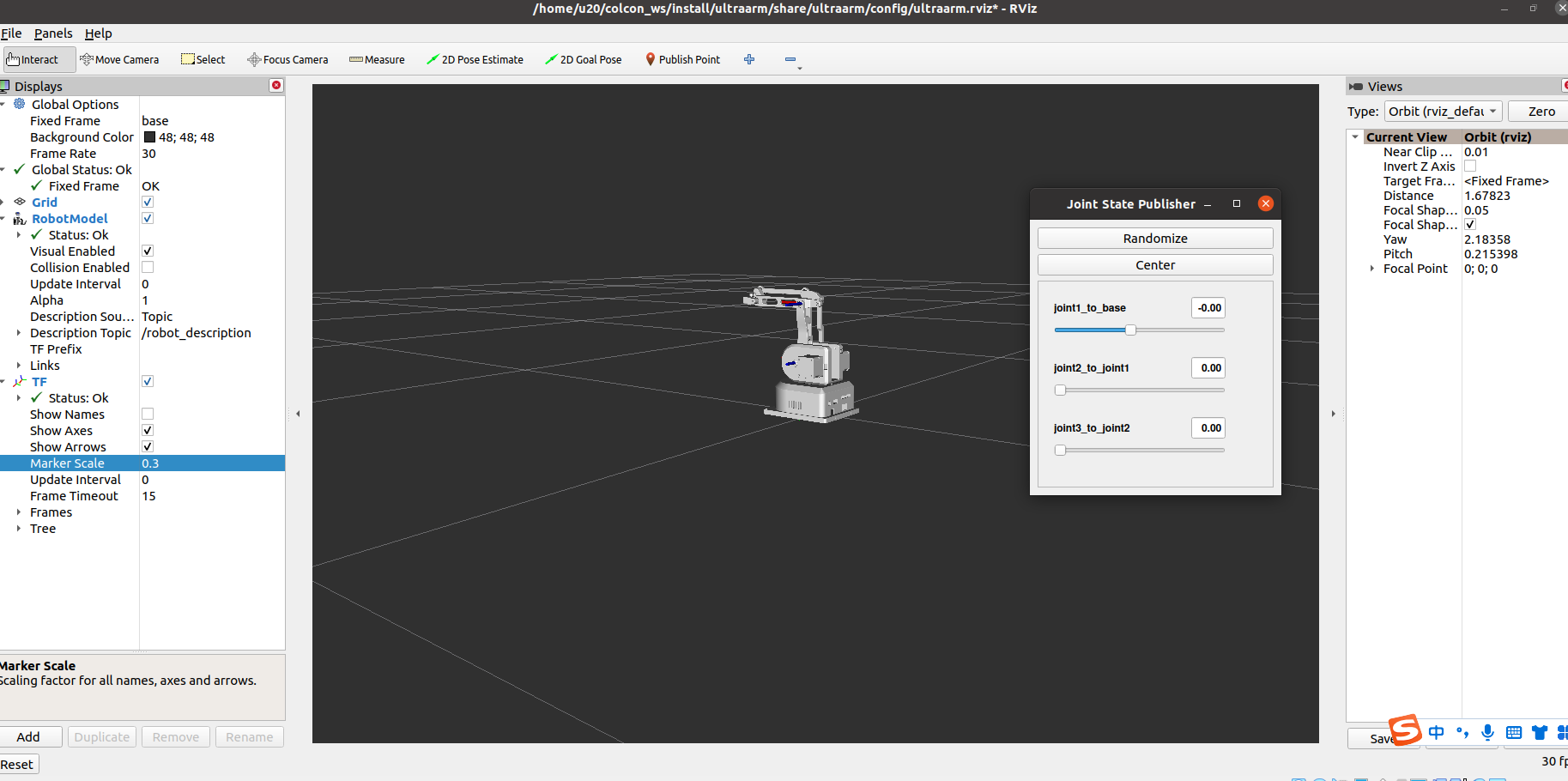
打开rviz2,并得到如下结果:
如果您想了解更多rviz的相关资料信息,您可以前往官方文档进行查看
4 机械臂的控制
4.1 使用环境
使用前需进行环境搭建,具体可查看 环境搭建 章节。
- ROS2版本支持:Ubuntu 20.04 / ROS2 Foxy
- 项目地址:https://github.com/elephantrobotics/mycobot_ros2/tree/humble/ultraArm
4.2 串口权限
使用机械臂示例之前,需确保机械臂串口连接至虚拟机并赋予串口权限:
4.3 滑块控制
打开一个命令行,运行:
# ultraArm 默认串口名为"/dev/ttyUSB0",波特率为115200.
ros2 launch ultraarm slider_control.launch.py
它将打开 rviz2 和一个滑块组件,你将看到如下画面:
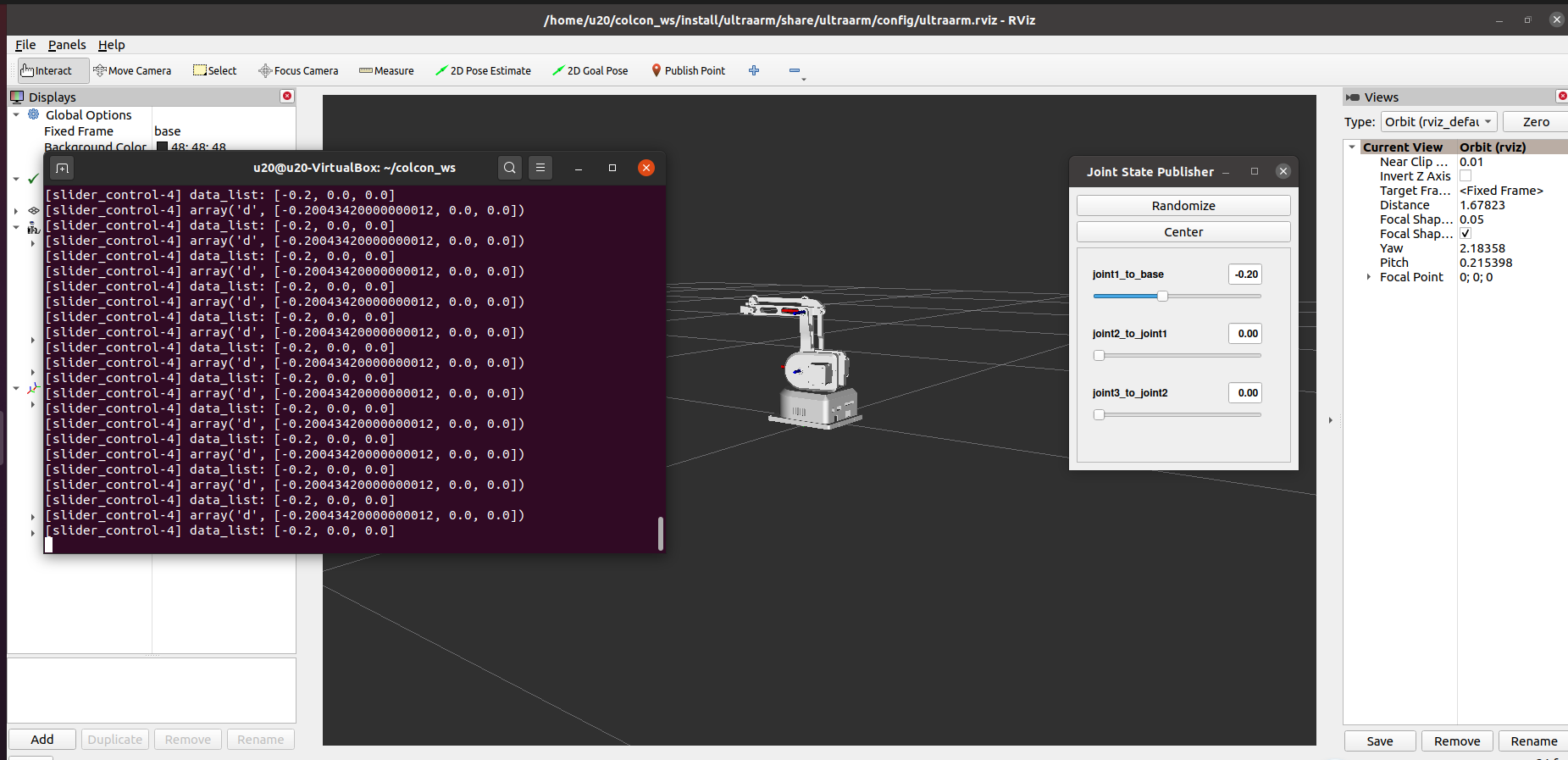
接着你可以通过拖动滑块来控制 rviz2 中的模型移动。真实的 ultraArm 将跟着一起运动。
请注意:由于在命令输入的同时机械臂会移动到模型目前的位置,在您使用命令之前请确保rviz中的模型没有出现穿模现象 不要在连接机械臂后做出快速拖动滑块的行为,防止机械臂损坏