单元测试
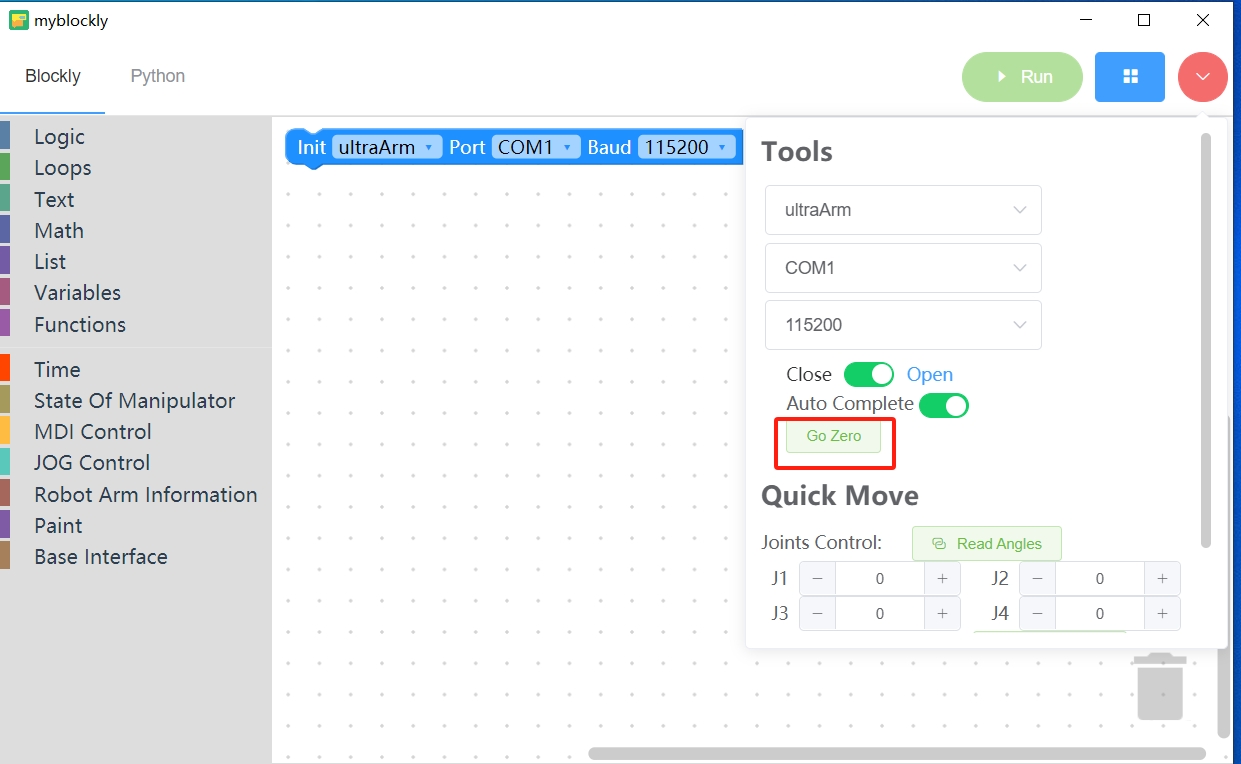
1 机械臂测试
使用myblockly对机械臂进行回零测试
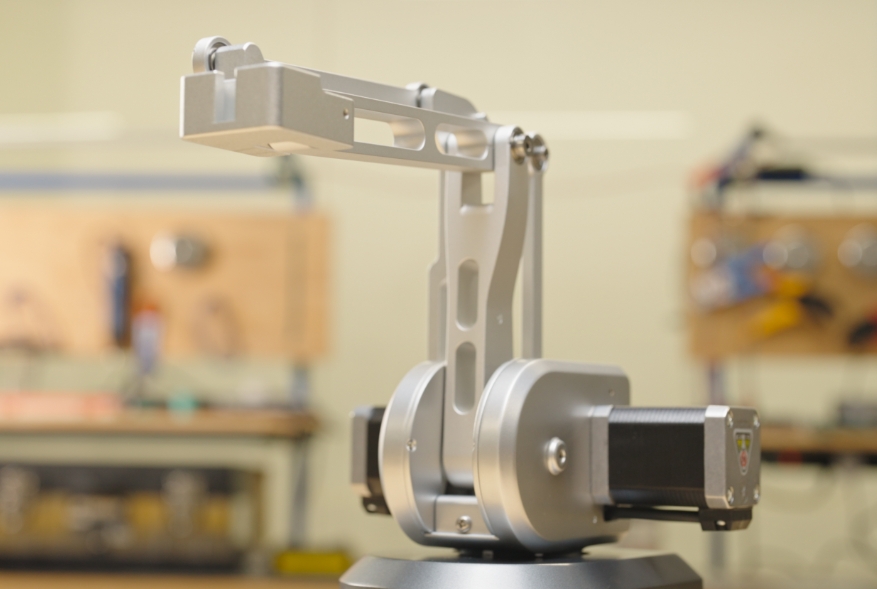
正常回零后,机械臂姿态会如下图所示
2 吸泵测试
先关闭myblockly,然后运行下面程序
from pymycobot import ultraArm
# 连接机械臂,填写机械臂的实际串口号
ua = ultraArm('COM1', 115200)
ua.sleep(0.5)
# 打开吸泵
ua.set_gpio_state(0)
ua.sleep(2)
# 关闭吸泵
ua.set_gpio_state(1)
ua.sleep(2)
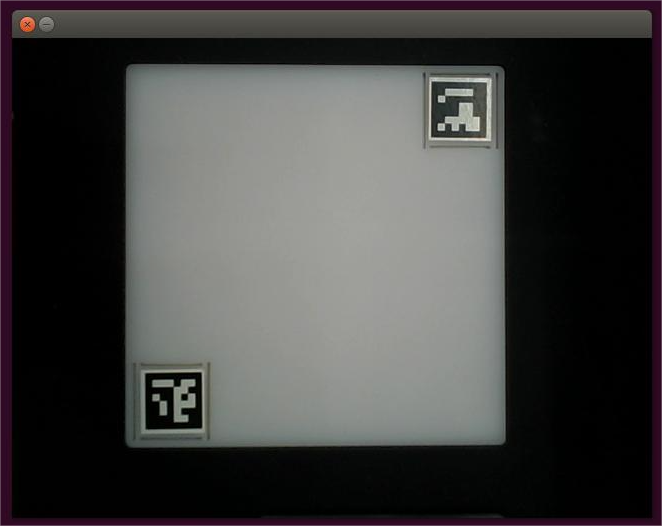
3 摄像头测试
首先,需要使用python运行aikit_V2包下的OpenVideo.py。若开启的摄像头为电脑摄像头则需要修改cap_num,具体可参考:注意事项。确保摄像头完全包含整个识别区域,且识别区域在视频中是正正方方的,如下图所示。若识别区域在视频中不符合要求,则需要调整摄像头的位置。
- 打开一个控制台终端(快捷键Win+R,输入cmd进入终端),输入以下命令进入目标文件夹
cd Desktop/aikit_V2/AiKit_ultraArm_P340/
- 输入以下命令,打开摄像头进行调整
python scripts/OpenVideo.py