功能说明
为避免输入过多繁琐命令使用ROS2,这里准备了ultraArm一键启动工具,包括编译程序、rviz2展示、滑块控制。
使用前提
ultraArm一键启动工具依赖pyqt5,所以使用前需安装pyqt5工具。
打开一个控制台终端(快捷键Ctrl+Alt+T),输入如下指令:
sudo apt-get install python3-pyqt5
sudo apt-get install qt5-default qttools5-dev-tools
使用步骤
1 打开 文件管理器 --> colcon_ws ---> src--> mycobot_ros2--> ultraArm 后,双击打开 ultraArm.sh 文件,进入工具界面。



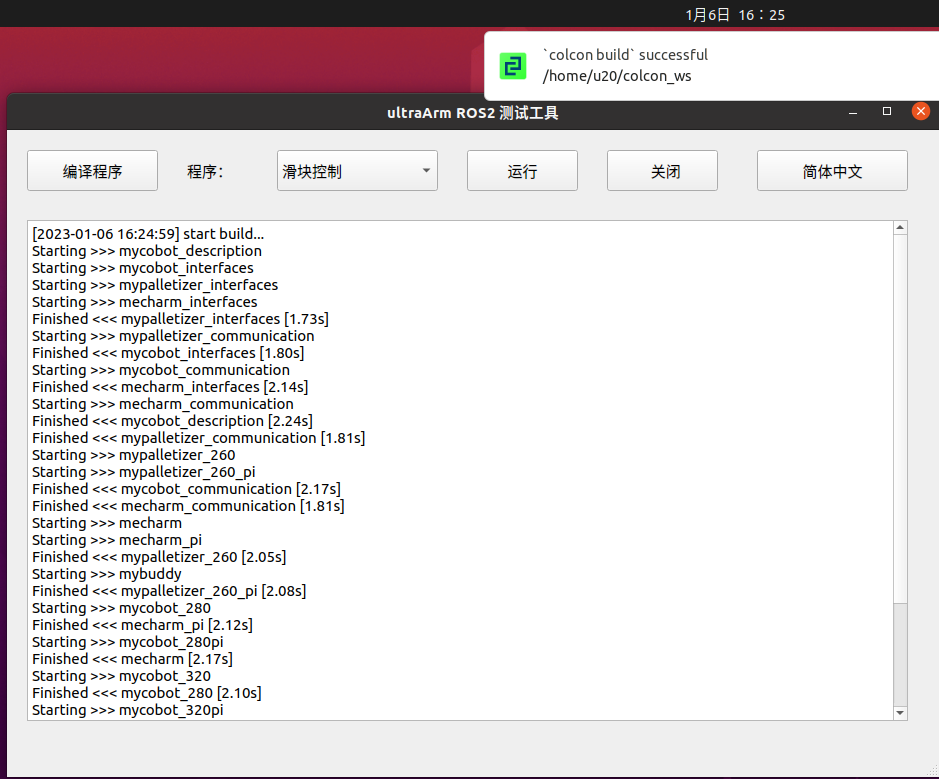
2 若首次从远程克隆 mycobot_ros2 包 或者mycobot_ros2 包下的文件有所改动时,则需要编译程序。

若编译成功,将出现如下提示:
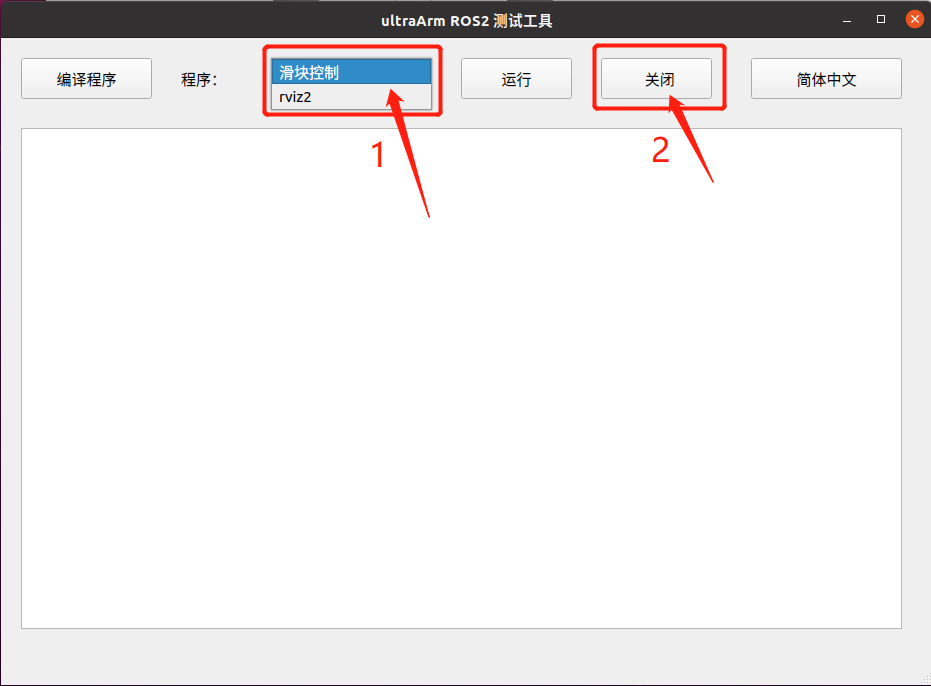
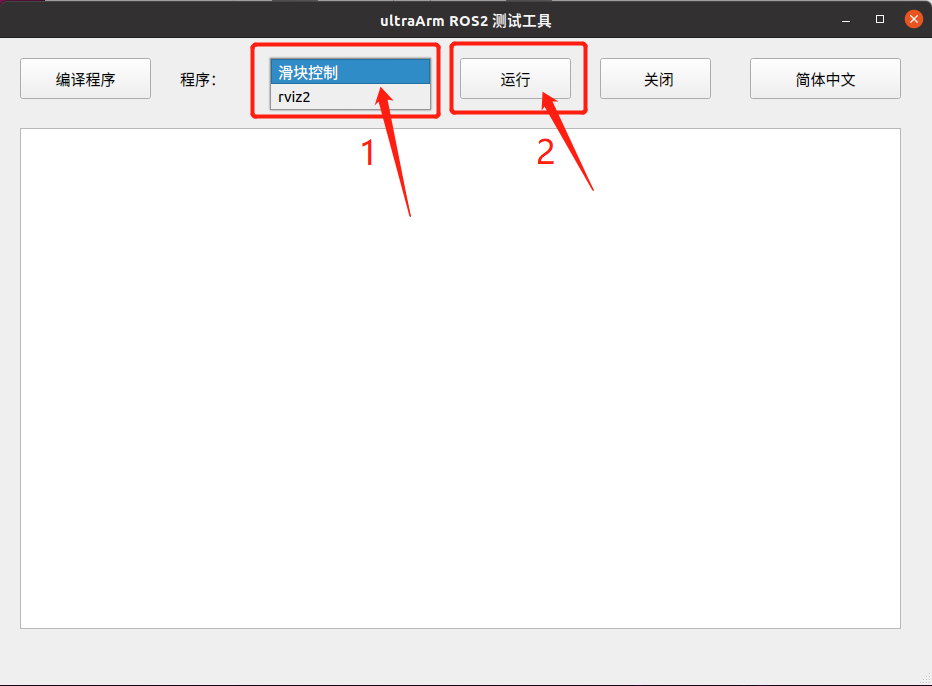
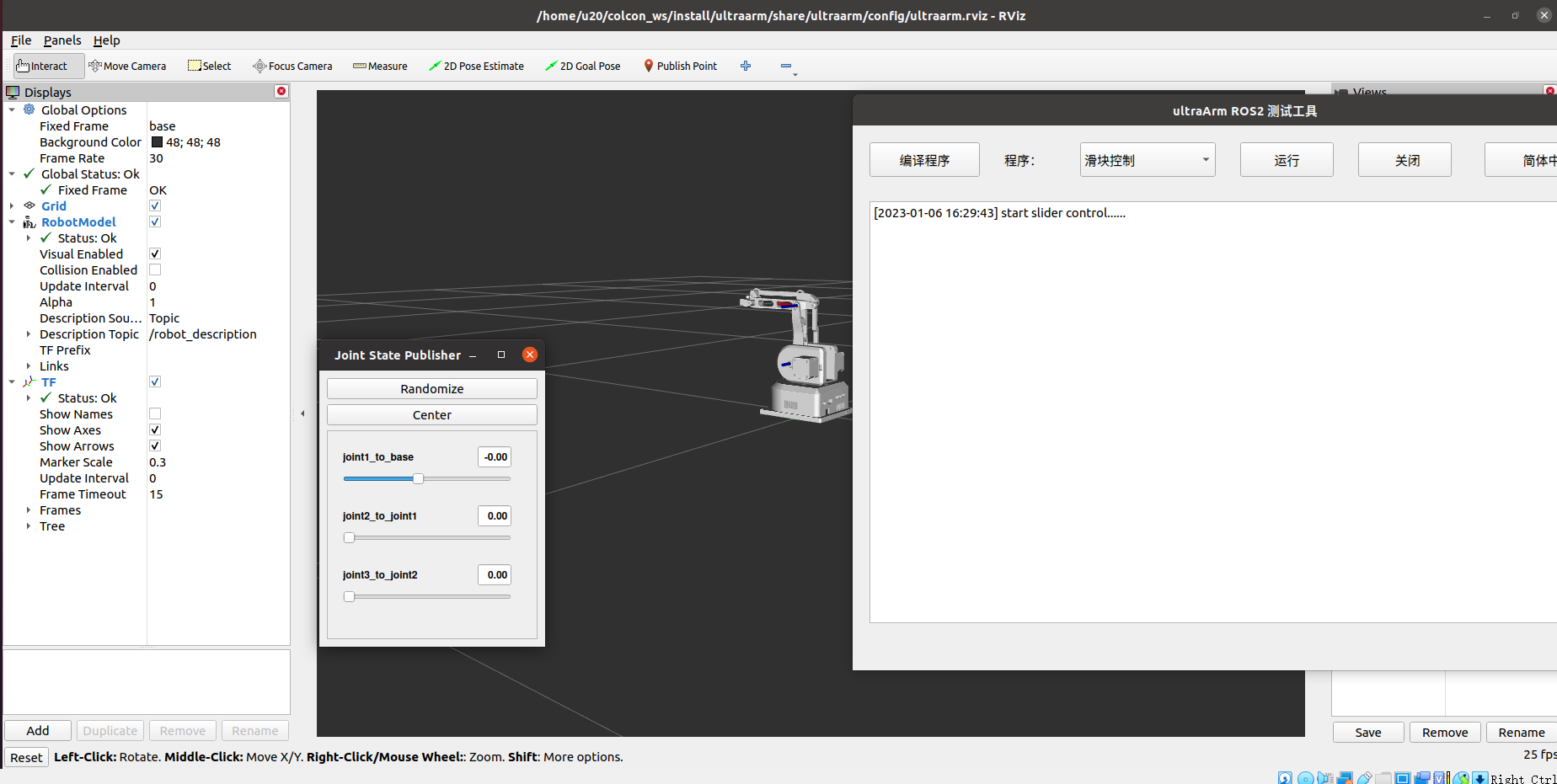
3 选择需要运行的程序后,点击运行即可。
4 选择当前运行的程序后,点击关闭即可。