控制吸泵和码垛搬运
开始前请确认:
1.已安装Python环境并下载了pymycobot包;
2.固件已烧录;
3.ultraArm开关已经打开。
本章学习内容
使用myBlockly控制吸泵以实现码垛和搬运。
API模块介绍
- 方法模块1:
设置全关节角度 - 目标:全关节角度设置可以实现机器人码垛搬运
参数:
角度参数:请参照ultraArm参数设置各个关节角度(需要哪个关节就设置哪个关节即可)
| 关节、 | 范围 | | ---------- | ------------- | | J1 | -150° ~ +170° | | J2 | -20° ~ +90° | | J3 | -5° ~ +70° | | J4(配件) | 无限制 |
速度参数:范围为0-100

- 方法模块2:
设置吸泵状态 - 目标:设置吸泵开关
- 参数:
- 状态参数:开/关

简单演示
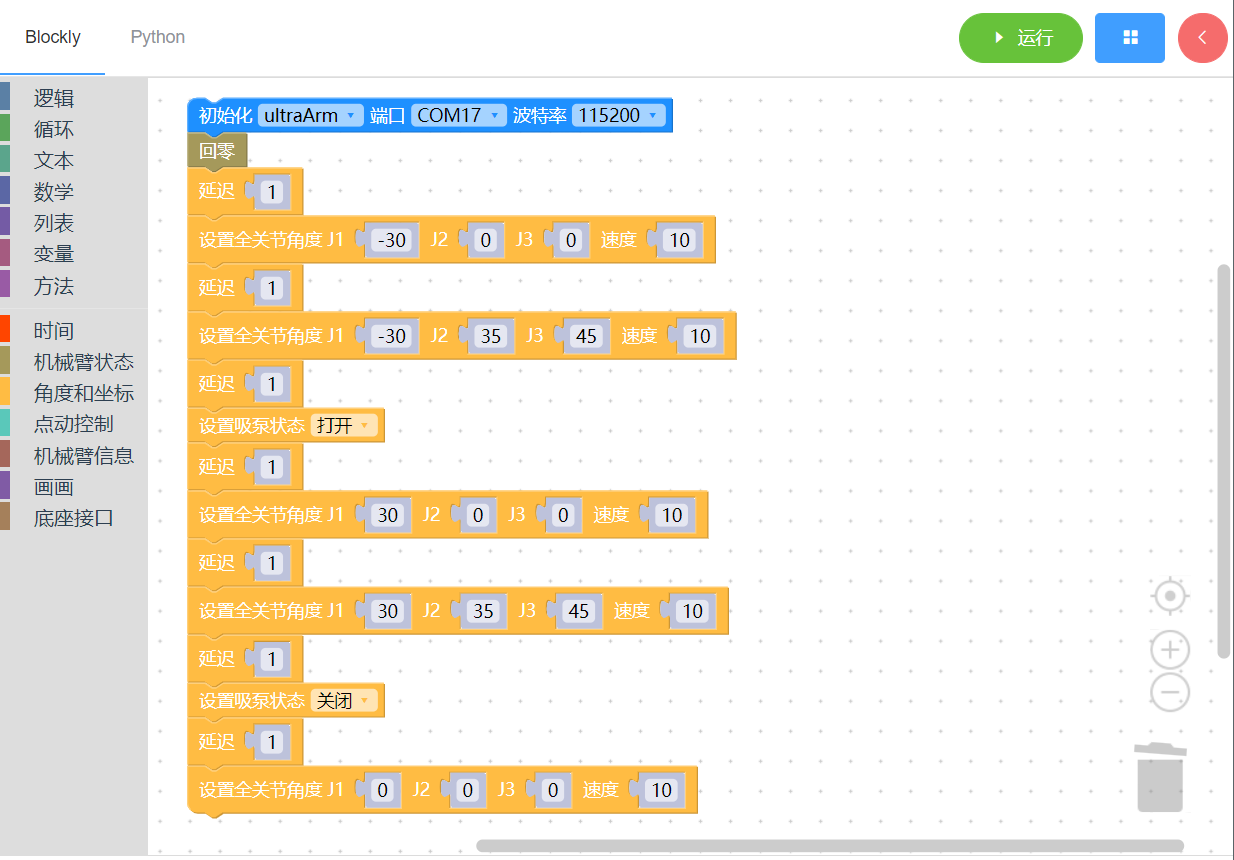
实现动作:机械臂回零,延迟一秒后,关节1以速度10移动至-30°,一秒后关节2、关节3以速度10移动至35°、45°,一秒后,吸泵开始工作,一秒后,关节1、关节2、关节3以速度10移动至30°、0°、0°,一秒后关节2、关节3以速度10移动至35°、45°,一秒后,吸泵停止工作,一秒后,机械臂回到零位。