软件安装
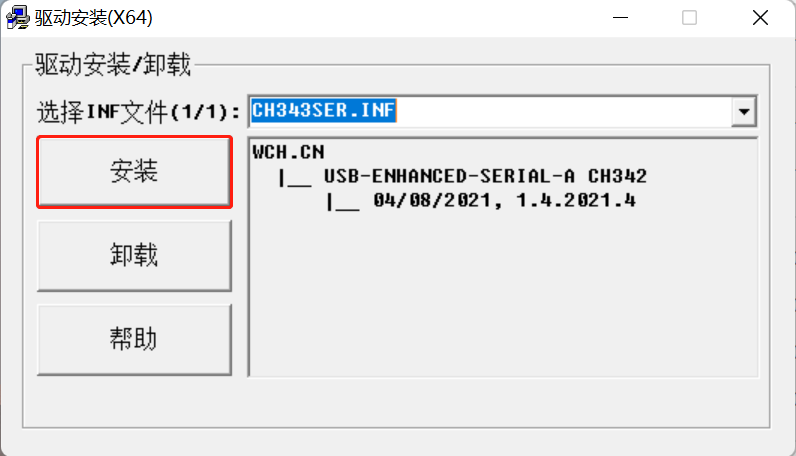
1 串口驱动下载和安装
串口驱动程序用于机械臂通信,以接收指令,因此使用myStudio烧录固件之前需要下载串口驱动程序。ultraArm需要安装CP34X (适用于CH9102版本)驱动程序压缩包。
注意:对于 Mac OS,在安装之前确保系统 "偏好设置->安全性和隐私->通用" ,并允许从 App Store 和被认可的开发者。

2 myBlockly安装
点击myBlockly下载。按照提示进行安装即可。
myBlockly界面展示

模块栏:
- 包含程序编写所需的方法模块,可以通过鼠标放入程序编辑区进行拼接
小工具栏:
点击右上角粉红色按钮会出现一个小工具栏,此处可以选择正确的机型、串口号以及波特率。也可以通过点击“读取角度”或“读取坐标”按钮获取机械臂实时关节角度和坐标。点击关节控制或坐标控制栏中的“+/-”可以控制机械臂移动。
程序编辑区域:
- 运行程序之前需要在初始化模块中或者小工具栏内选择正确的机型、端口以及波特率,否则程序无法正常运行。
- 把所需的模块方法拖拽到该区域拼接起来实现自己的程序。
3 python安装
注意:安装之前,请先确认您的电脑是64位还是32位。右键点击
我的电脑,选择属性。如下图显示是64位的操作系统,所以选择64位的Python安装包。


Step 1: Python的下载和安装(建议安装python3.7版本以上)
- Python官方下载地址: https://www.python.org/downloads/
点击
Downloads选项,开始下载Python,点击Add Python 3.10 to PATH,点击Install Now,开始安装Python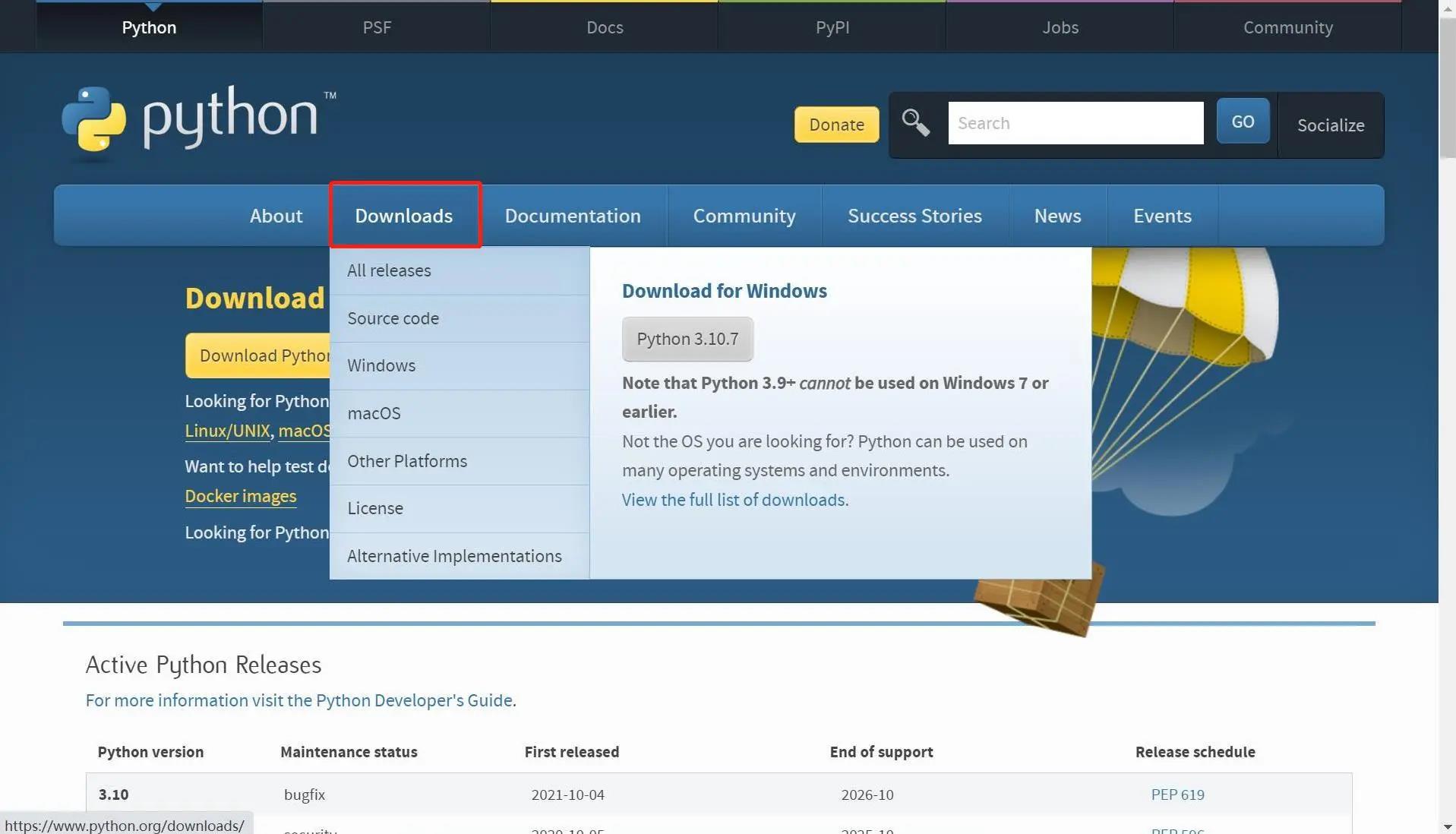

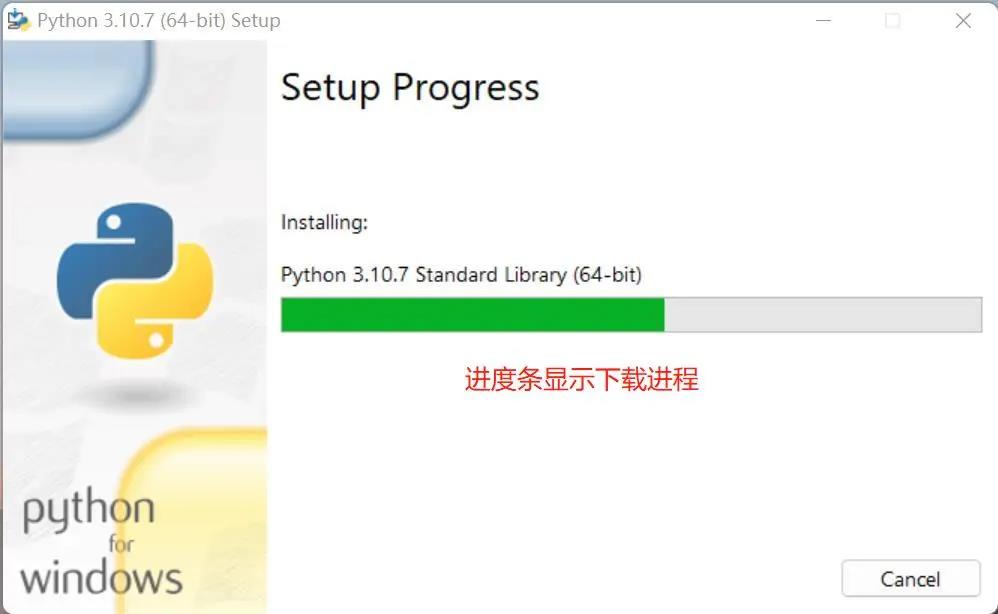
出现“Setup was successful”提示,说明安装完成
Step 2: pymycobot安装
- 指令直接安装,无需克隆下载代码,打开一个控制台终端(快捷键Win+R,输入cmd进入终端),输入以下命令后按下键盘回车键:
pip install pymycobot --upgrade
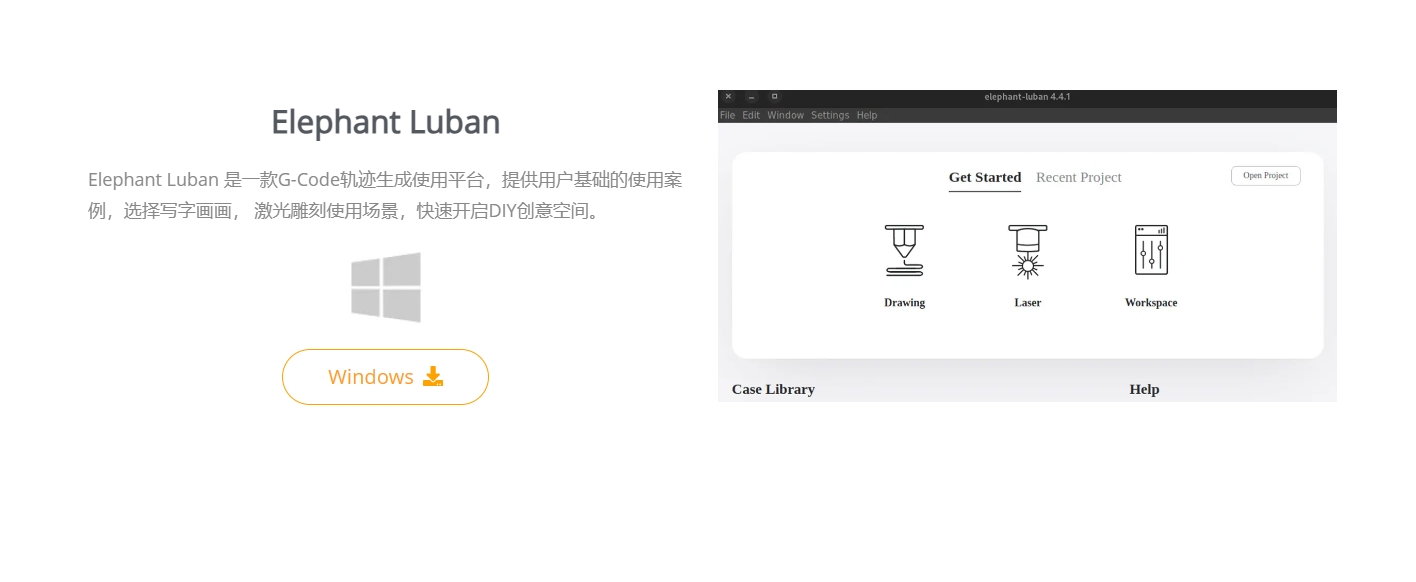
4 Elephant Luban安装
软件下载
将Elephant Luban安装到电脑上