开始前请确认:
1.已安装Python环境并下载了pymycobot包;
2.固件已烧录;
3.ultraArm开关(电源线旁)已经打开。
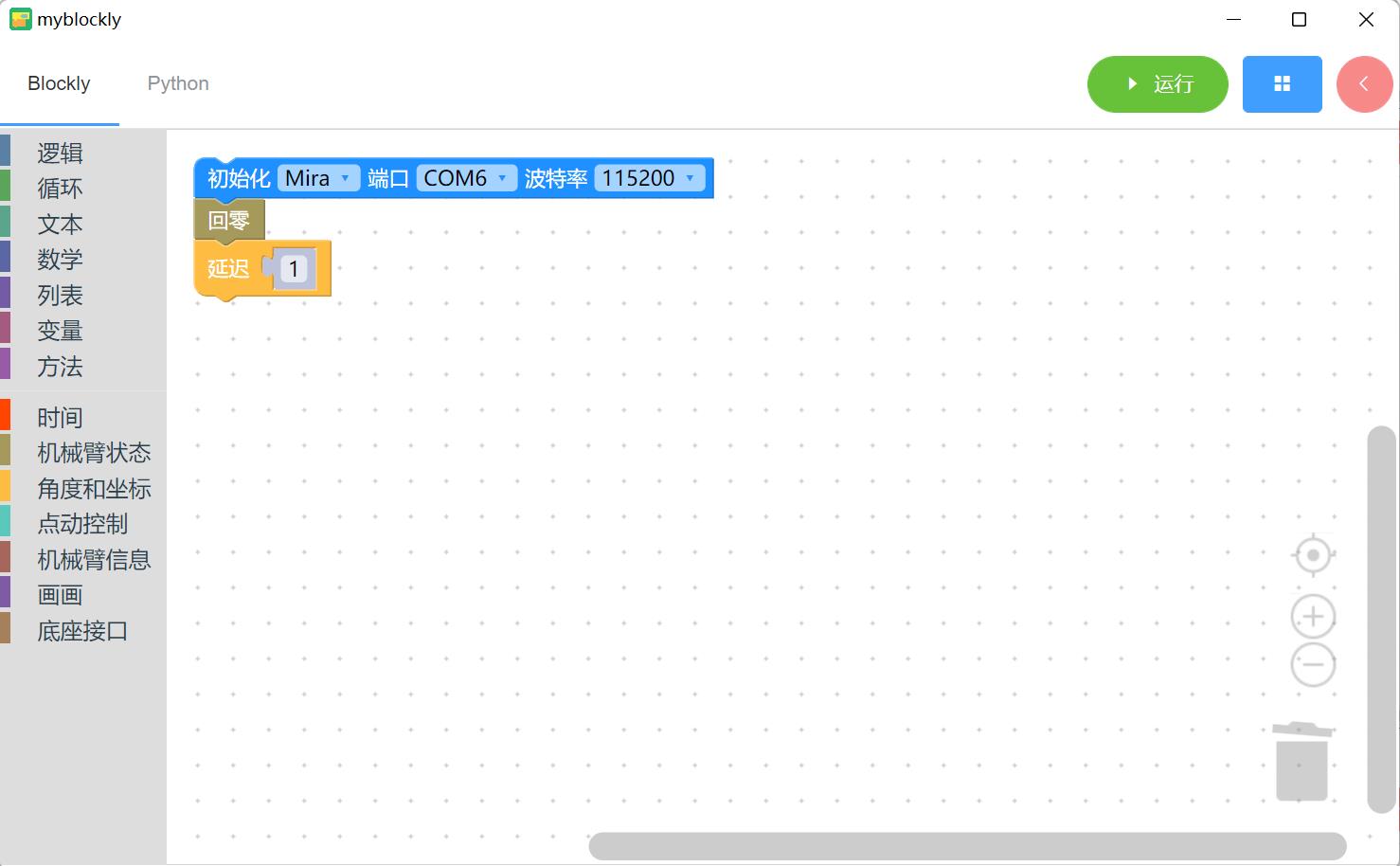
如何控制ultraArm回零。
注意:ultraArm每次运动之前必须回零,否则无法正确读取角度。
回零
回零模块后可以给机械臂加个延时模块,稍微停顿一下再继续做其他动作。
延时
实现动作:各个关节回归零位。