软件安装
1 串口驱动下载和安装
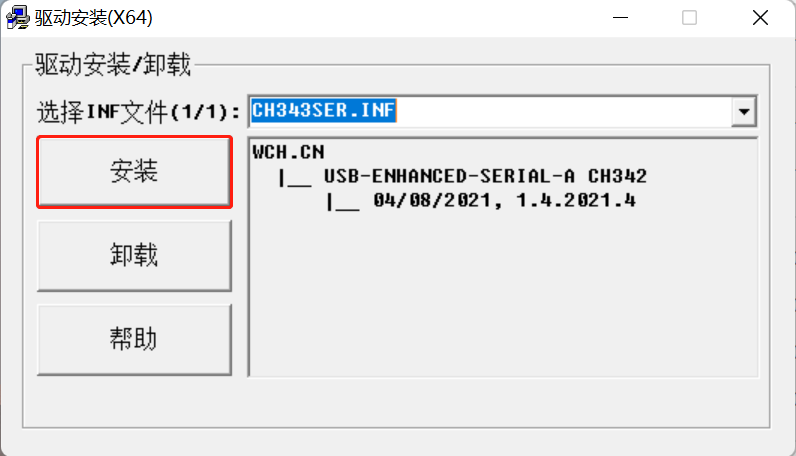
串口驱动程序用于机械臂通信,以接收指令,因此使用myStudio烧录固件之前需要下载串口驱动程序。ultraArm需要安装CP34X (适用于CH9102版本)驱动程序压缩包。
注意:对于 Mac OS,在安装之前确保系统 "偏好设置->安全性和隐私->通用" ,并允许从 App Store 和被认可的开发者。

2 myBlockly安装
点击myBlockly下载。按照提示进行安装即可。
myBlockly界面展示

模块栏:
- 包含程序编写所需的方法模块,可以通过鼠标放入程序编辑区进行拼接
小工具栏:
点击右上角粉红色按钮会出现一个小工具栏,此处可以选择正确的机型、串口号以及波特率。也可以通过点击“读取角度”或“读取坐标”按钮获取机械臂实时关节角度和坐标。点击关节控制或坐标控制栏中的“+/-”可以控制机械臂移动。
程序编辑区域:
- 运行程序之前需要在初始化模块中或者小工具栏内选择正确的机型、端口以及波特率,否则程序无法正常运行。
- 把所需的模块方法拖拽到该区域拼接起来实现自己的程序。
3 python安装
Step 1: Python的下载和安装(建议安装python3.7版本以上)
- Python官方下载地址: https://www.python.org/downloads/
点击
Downloads选项,开始下载Python,点击Add Python 3.10 to PATH,点击Install Now,开始安装Python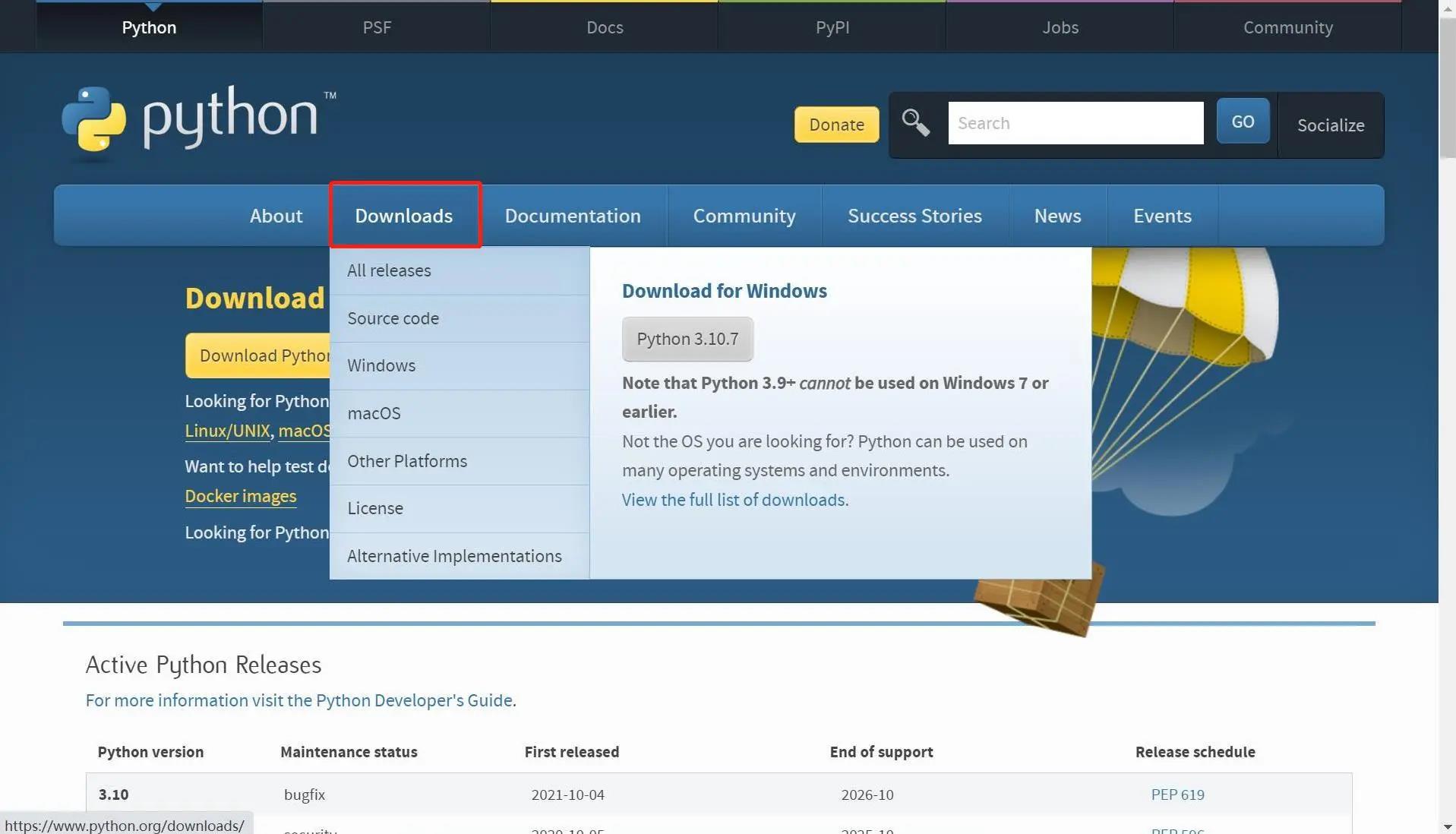

出现“Setup was successful”提示,说明安装完成
Step 2: pymycobot安装
- 指令直接安装,无需克隆下载代码,打开一个控制台终端(快捷键Win+R,输入cmd进入终端),输入以下命令后按下键盘回车键:
pip install pymycobot --upgradeStep 2: opencv 安装
OpenCV-Python是基于Python的库,旨在解决计算机视觉问题。安装之前需确保Python环境已完成搭建。
打开一个控制台终端(快捷键Win+R,输入cmd进入终端),分别输入以下命令:
# 二者版本号需保持一致,这里安装4.5.5.62版本
pip install opencv-python==4.5.5.62
pip install opencv-contrib-python==4.5.5.62
4 Git安装
Git是一个开源的分布式版本控制系统,用以有效、高速的处理从很小到非常大的项目版本管理。
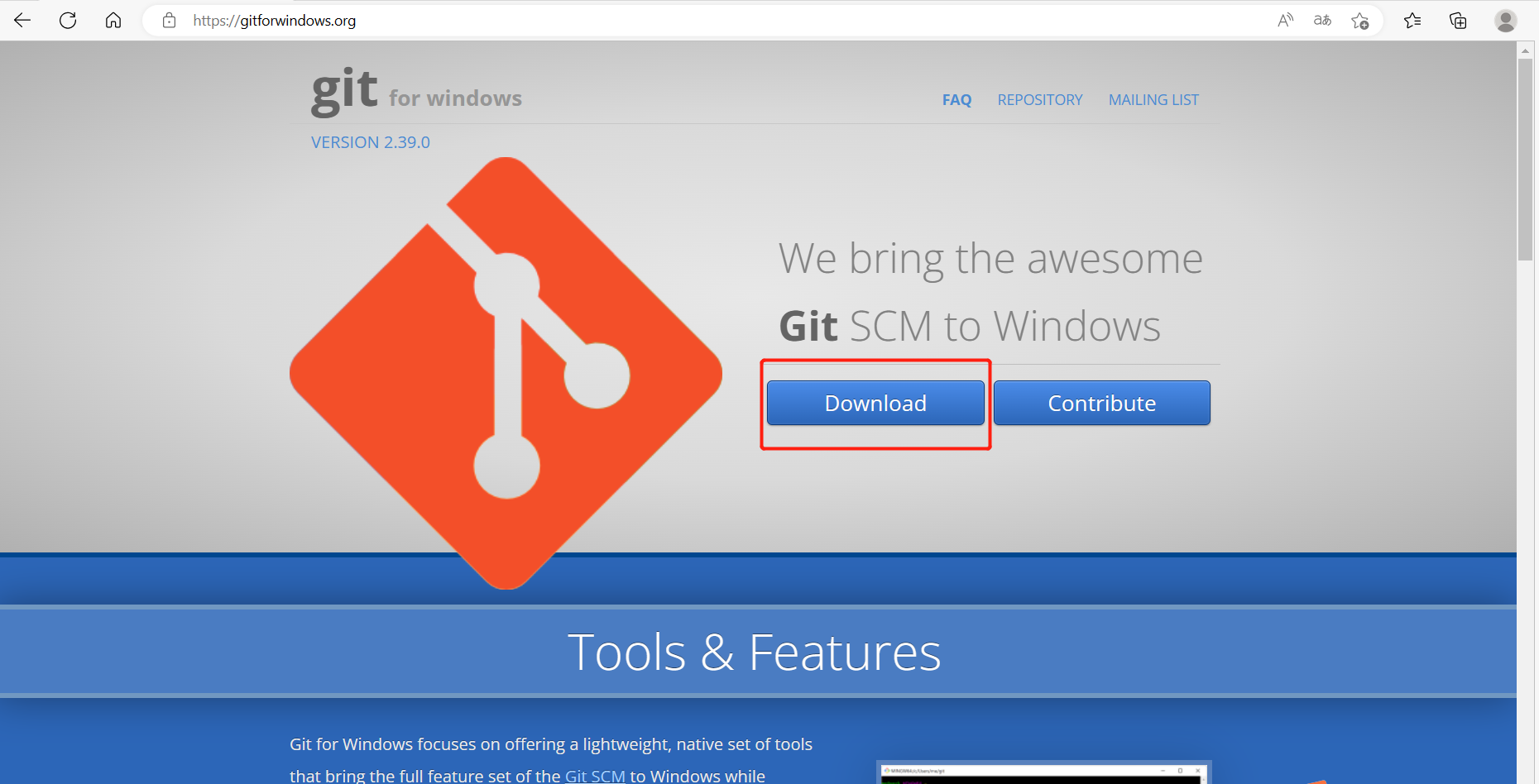
Git官方下载地址: https://gitforwindows.org/
点击
Download选项,开始下载Git
- 双击下载好的exe文件进行安装
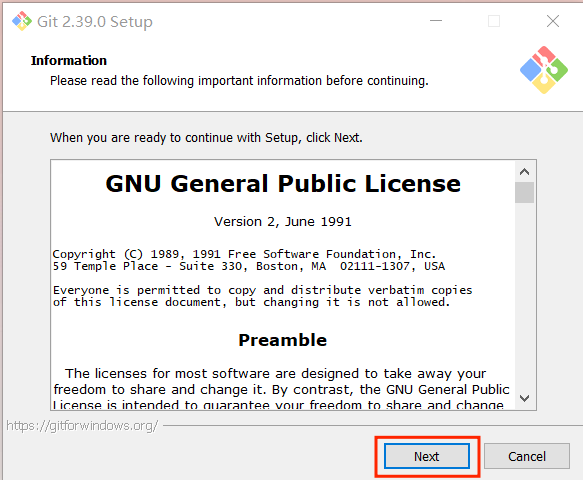
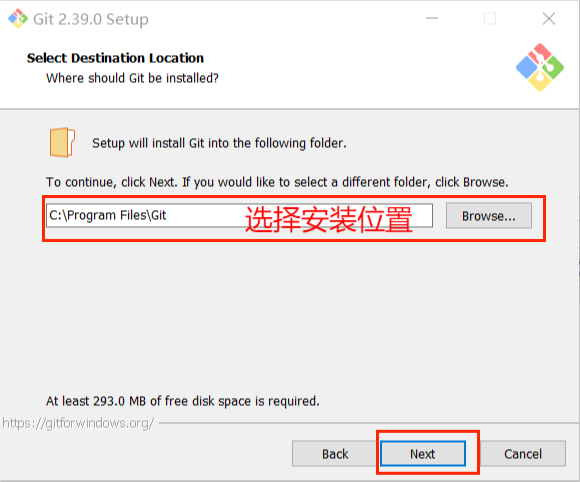
- 选择安装位置,默认是在C盘下,如果不想放在C盘下可以进行位置更换。选择好安装位置以后点击next。
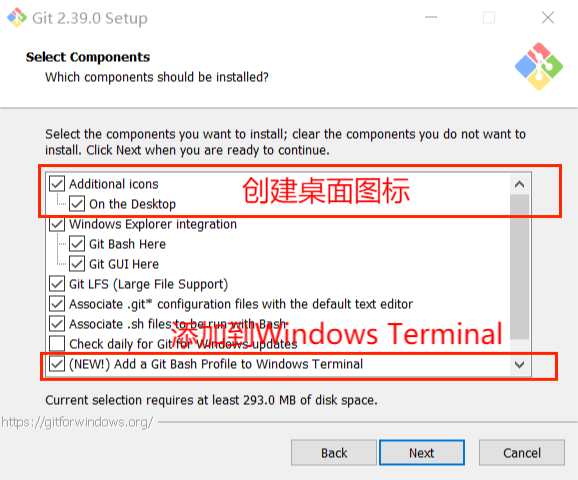
- 默认不会在桌面创建图标,并且增加了一个新的特性,将GItBash添加到Windows terminal中,建议勾选。
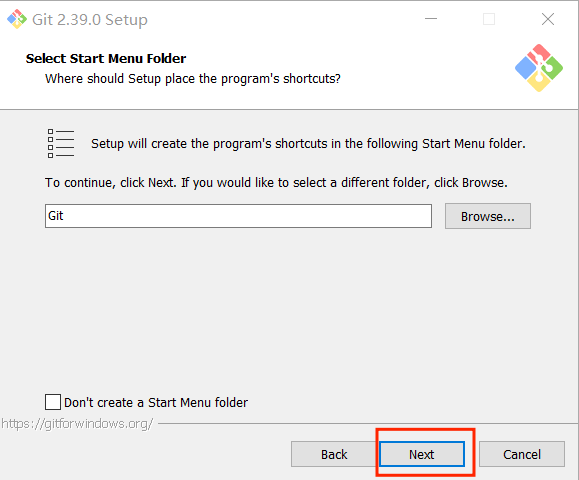
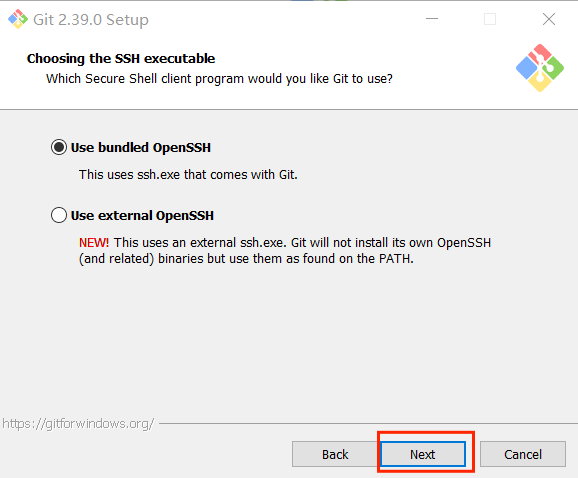
- 下一步默认,选择Next即可。
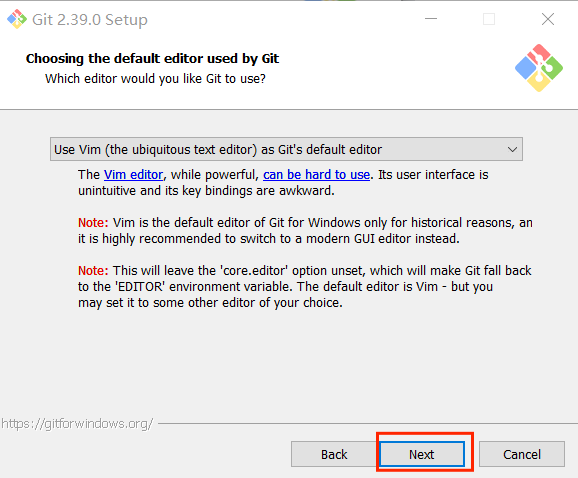
- 选择一个默认的编辑器,默认为Vim(Linux的),里面还有Notepad,我选择使用Vim
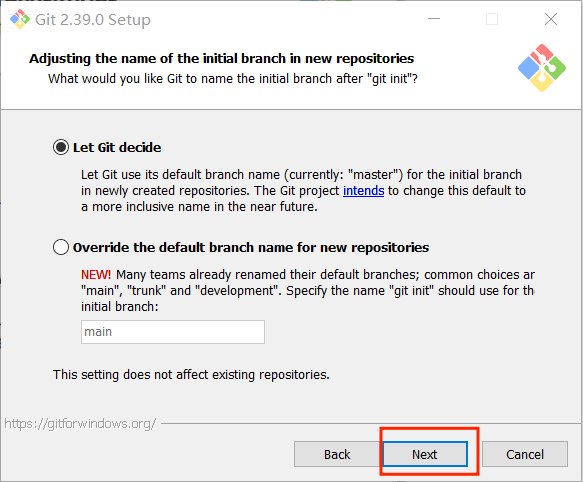
- 在Git创建分支后的默认的名字(master),如果没有特别的使用默认的设置,点击next即可。
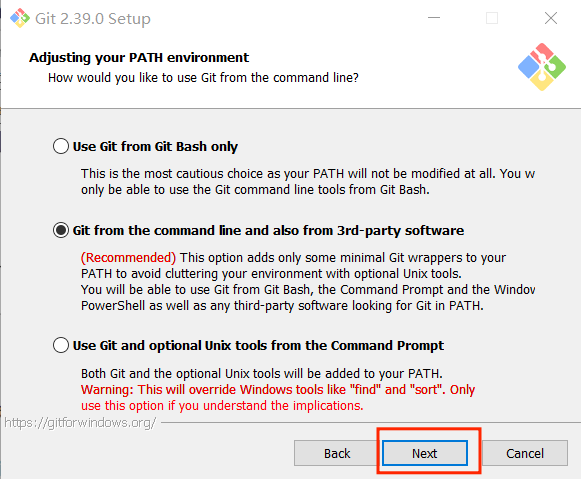
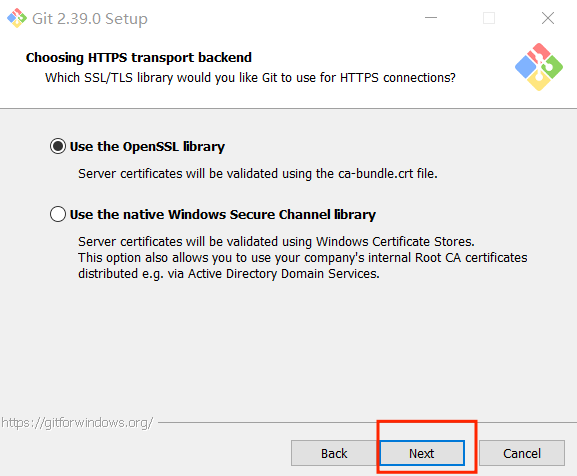
- 下一步默认,选择Next即可。
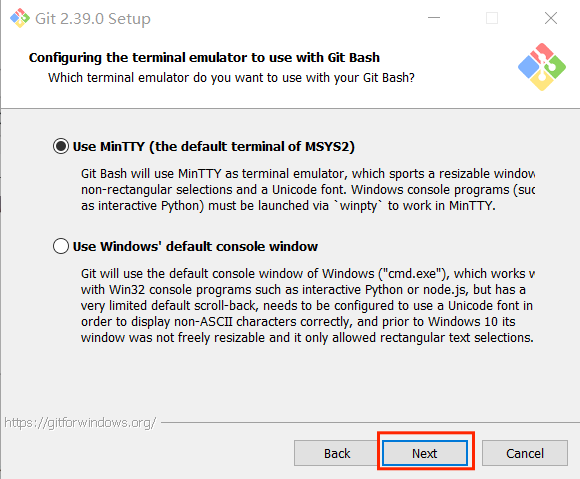
- 下一步默认,选择Next即可。
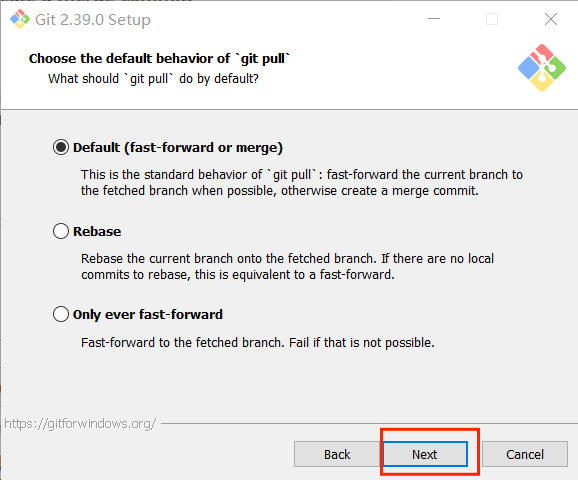
- 下一步默认,选择Next即可。
- 下一步默认,选择Next即可。

- 下一步默认,选择Next即可。
- 下一步默认,选择Next即可。
- 下一步默认,选择Next即可。

- 下一步默认,选择Next即可。

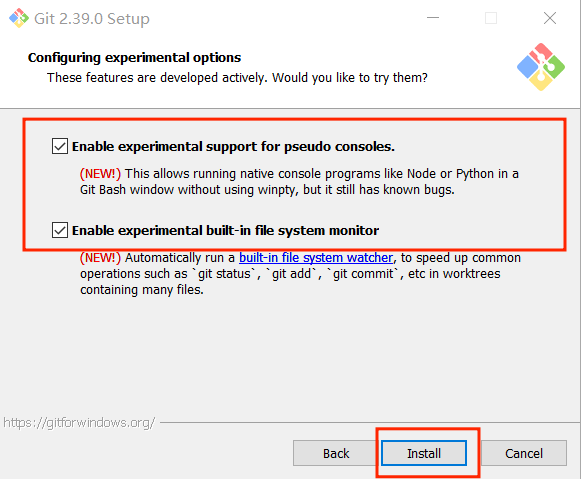
- 额外的配置选项,这里面默认都没有选,可以将这两个选框勾选上,支持(node、python虽然还有bug)然后选择install。
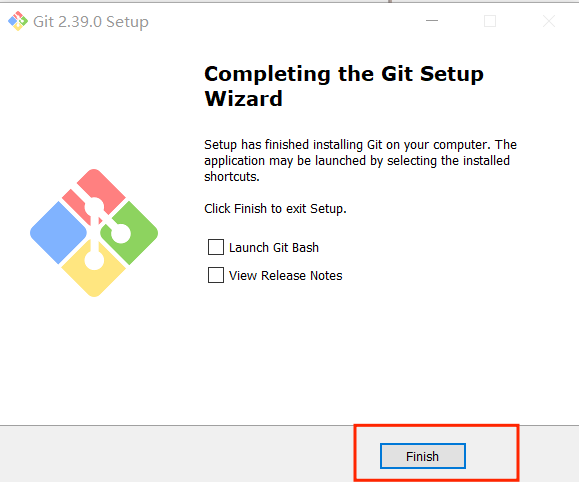
- 安装完成后,点击FInish安装完成。
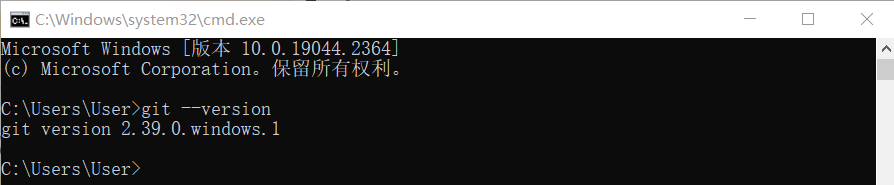
检查
打开一个控制台终端(快捷键Win+R,输入cmd进入终端),输入以下命令查看Git版本信息:
git --version
在后续下载 aikit 包需要用到git,git 的使用可以参考下面链接:
5 aikit_V2 安装
aikit_V2 是 ElephantRobotics 推出的,适配旗下桌面机械臂的人工智能套装V2.0 程序包。
项目地址:https://github.com/elephantrobotics/aikit_V2
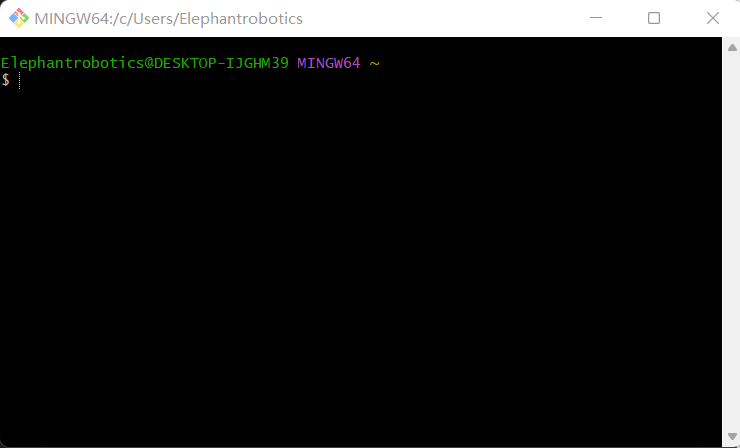
- 1 双击桌面
Git Bash图标,进入Git终端。

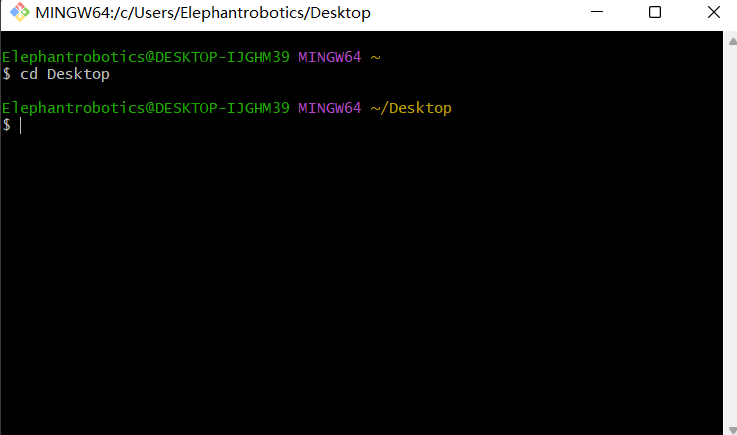
- 2 在Git终端输入以下命令:
cd Desktop
git clone https://github.com/elephantrobotics/aikit_V2.git
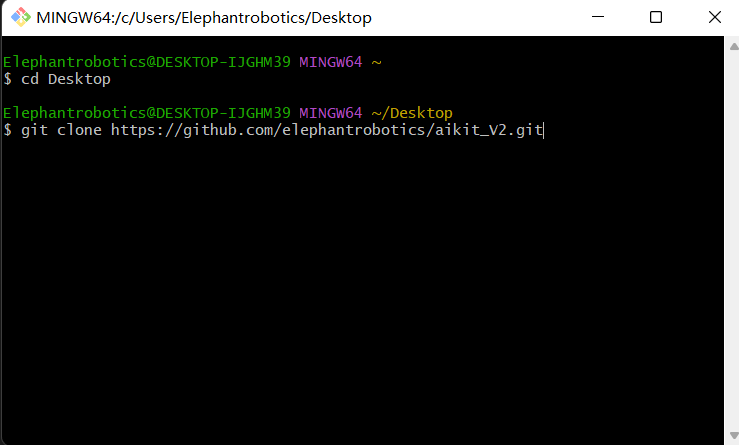
然后桌面会出现 aikit_V2 文件夹。

至此,Windows环境搭建完成。