夹爪使用
开始前请确认:
1.已安装Python环境并下载了pymycobot包;
2.固件已烧录;
3.ultraArm开关已经打开;
4.夹爪接口已接好。
本章学习内容
使用myBlockly控制夹爪。
API模块介绍
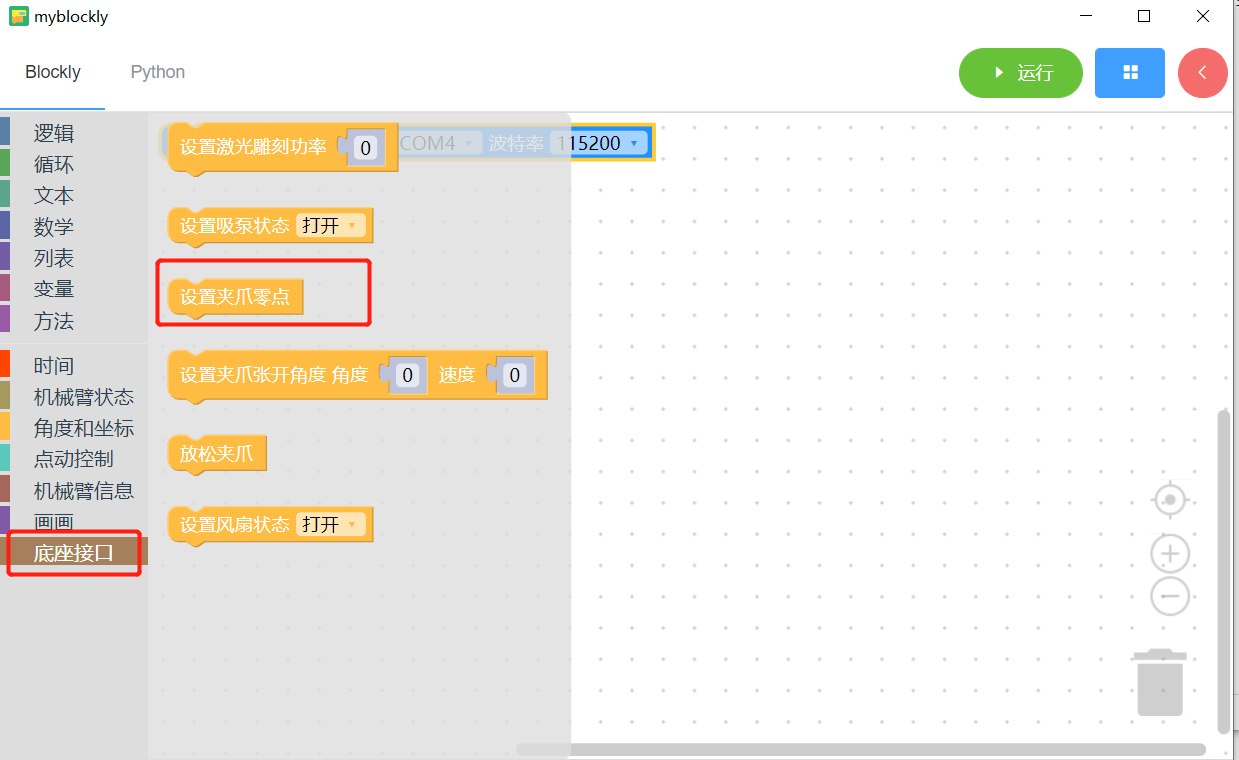
- 方法模块1:
校准夹爪零位 - 目的:校准夹爪零位
- 注意:使用此方法模块前需将夹爪打开到最大位置

- 方法模块2:
设置夹爪开关 - 目的:控制夹爪打开或关闭
- 参数:
- 夹爪状态参数:打开/关闭 0-100: 0-全关 ,100-全开, 速度:0-1500 RPM/s
简单演示
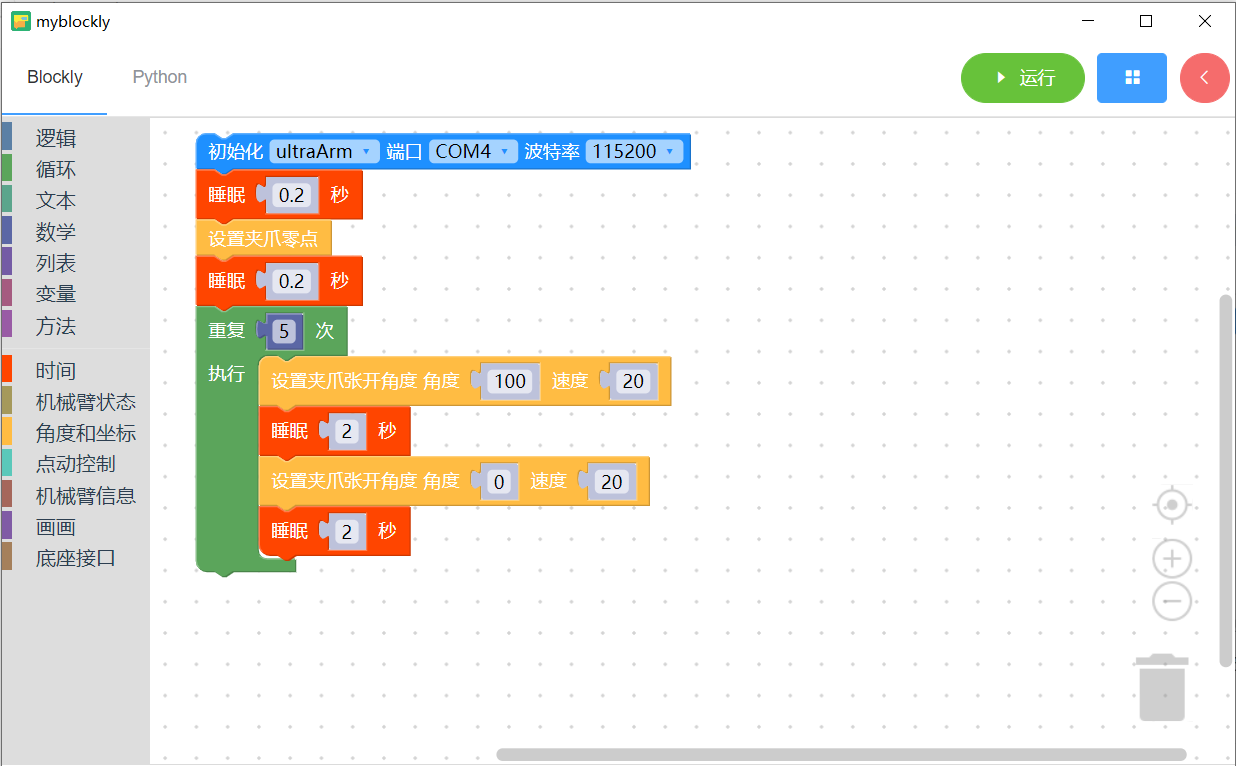
实现动作:0.2秒后,夹爪将当前位置设为零位,0.2秒后,夹爪会在当前位置重复5次打开-关闭动作。