舵机
适配型号:ultraArm P340
产品图示

舵机 : 增加机械臂关节自由度
工作原理
什么是舵机?
- 舵机其实就是伺服电机,因为国内的用户已开始使用在航模等设备的舵轴控制,所以国内对这些轻量级的伺服电机称之为舵机
什么是伺服电机?
- 伺服电机是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置
伺服电机工作原理
- 伺服系统是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。
适用物体
- 作为机械臂 J4 关节使用
安装教程文字
第一步: 从上至下插入快换舵机
第二步: 插入连接线
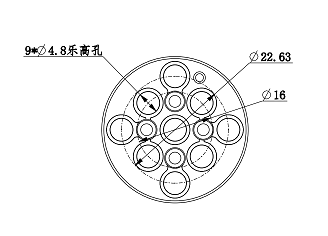
孔位安装尺寸
注意事项
- 请确保产品已经按照说明连接成功
- 请确保产品供电为附带适配器供电
- 请确保电源适配器能正常工作
Python环境下使用舵机:
from pymycobot import ultraArm
# 连接机械臂
ua = ultraArm('COM17', 115200)
ua.sleep(0.5)
# 回零
ua.go_zero()
ua.sleep(1)
# 简单控制四个关节
ua.set_angles([20, 30, 40, 50], 100)
参考视频