软件问题
Q:在使用写字画画功能时,落笔处到轨迹起始点的之间的轨迹如何消除? A:设置抬笔和落笔高度,同时注意起始点的Z轴的设置,确保Z轴与落笔高度相加能正常让笔刚好落在纸张上
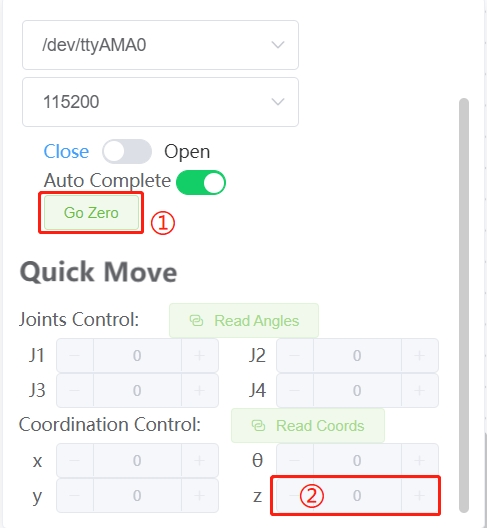
Q:如何控制末端与桌面的距离,比如想让末端贴近桌面如何设置?
A:如果你想让手臂的末端保持靠近桌面,建议你使用myblockly快速移动工具,先点击回零然后让z轴的值减小,调整到合适的位置,然后记录当前xyz轴的关节值,将关节的值填充到代码块中就可以实现使用程序来控制末端靠近桌面。
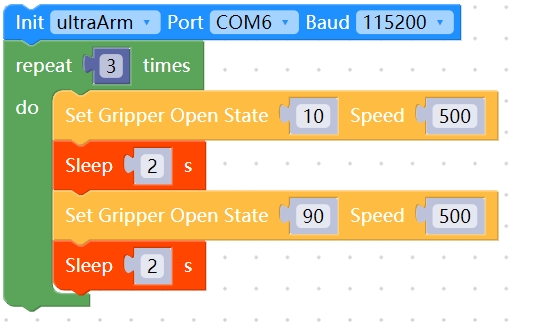
Q: ultraArm+夹爪源码:
Q:p340能做到开机自启动程序控制机械臂吗?
- A:目前做不到
Q:340写字怎么是描边的形式,全填满的要怎么设置
A:参考下图,加工方法选择填充

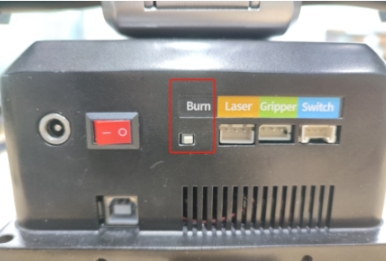
Q:在使用mystudio烧录固件的时候,无法正常烧录如何处理?
A:注意在烧录固件时,在开始这个过程之前必须按下烧录按钮。需要检查此烧录按钮是否被按下,烧录结束之后,记得让按钮保持未按下状态再使用
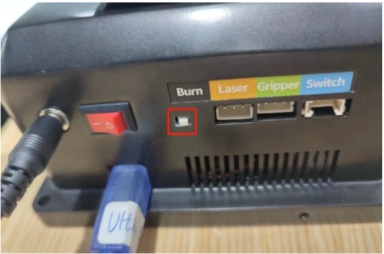
Q:奥创在使用过程机械臂突然掉使能,处于释放状态,如何处理?
A:在使用代码控制机器时,请确保你已经松开了“烧录”按钮,即让按钮处于未按下状态。当按下“烧录”按钮并且在加电复位时松开按钮时,会出现这种突然释放的情况.
Q:奥创最后一笔会歪有可能是什么原因导致的?如果要矫正机械臂抖动顾客可以矫正吗?
- A:机械臂有部分螺丝锁紧力矩不够。把机械臂上的螺丝都再扭紧一些
Q:340机器出现使用mystudio烧录固件无法烧录的情况怎么处理?
- A:p340这个机器我们自己测时有的电脑mystudio烧录不了,把mystudio放到其他盘(除c盘外)就可以了。c盘要求的权限会比较苛刻
1 关于myStudio
Q:myStudio是什么?
- A: 是固件烧录器。
Q:mystudio上识别不到mycobot的串口怎么办?
- A:如果您的电脑设备对连接的机械臂不提示,请先安装串口驱动。另外需要注意的是,树莓派、Arduino和Jetson nano系列机械臂是无法使用数据线连接到笔记本电脑的,需要在内置的系统中使用mystudio进行固件烧录。
2 关于myblockly
Q:myblockly运行时总会出现弹框,是为什么?
- A:运行myblockly程序前要先关闭串口占用。
3 关于ROS1
Q:终端切换到~/catkin_ws/src中使用git安装并更新mycobot_ros时,出现目标路径"mycobot_ros"已经存在,原因是什么?
- A:说明
~/catkin_ws/src中已经存在一个mycobot_ros程序包,需要提前将其删掉,再重新执行git操作即可。
Q:rosrun运行时,终端报错显示counld not open port /dev/ttyUSB0:Permission: '/dev/ttyUSB0',是为什么?
- A:串口权限不够,终端输入
sudo chmod 777 /dev/ttyUSB0赋予权限。
Q:ros程序为什么不能在vscode运行?
- A:因为vscode终端不能加载到ros环境,所以需要在系统终端运行。
Q:rosrun运行时,终端提示Unable to register with master node [http://localhost:11311]: master may not be running yet. Will keep trying的原因是?
- A:运行ros程序前,需开启ros节点,终端输入
roscore。
Q:rosrun运行时,终端报错显示counld not open port /dev/ttyUSB0:No such file or directory: '/dev/ttyUSB1',是为什么?
- A:串口有误。需确认当前机械臂的实际串口。可通过
ls /dev/tty*查看。
Q:在Ubuntu18.04中进行catkin_make构建代码失败,终端提示Project 'cv_bridge' specifies '/usr/include/opencv' as an include dir, which is not found.等报错信息
- A:配置文件中的opencv路径与系统实际路径不相符。需使用sudo修改配置文件(路径为
/opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake),系统实际opencv路径位于/usr/include/路径下。
Q:编译完成后,新开终端运行launch指令时,为什么会出现下面的错误?

- A1:系统没有添加ros环境变量,所以每次开启新终端都要source:
cd ~/catkin_ws/
source devel/setup.bash
- A2:系统添加ros环境变量,每次开启新终端后无需执行source:
# noetic为Ubuntu20.04系统
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
- A3:可能是指令中的文件名与实际中mycobot_ros包里面的文件名不一致,请仔细检查指令是否有误。