自适应夹爪+快换舵机使用说明
适配型号:ultraArm P340
1 硬件连接
新版本快换舵机+自适应夹爪
将乐高连接键的一侧插入夹爪中

然后乐高连接键的另一侧插入快换舵机中
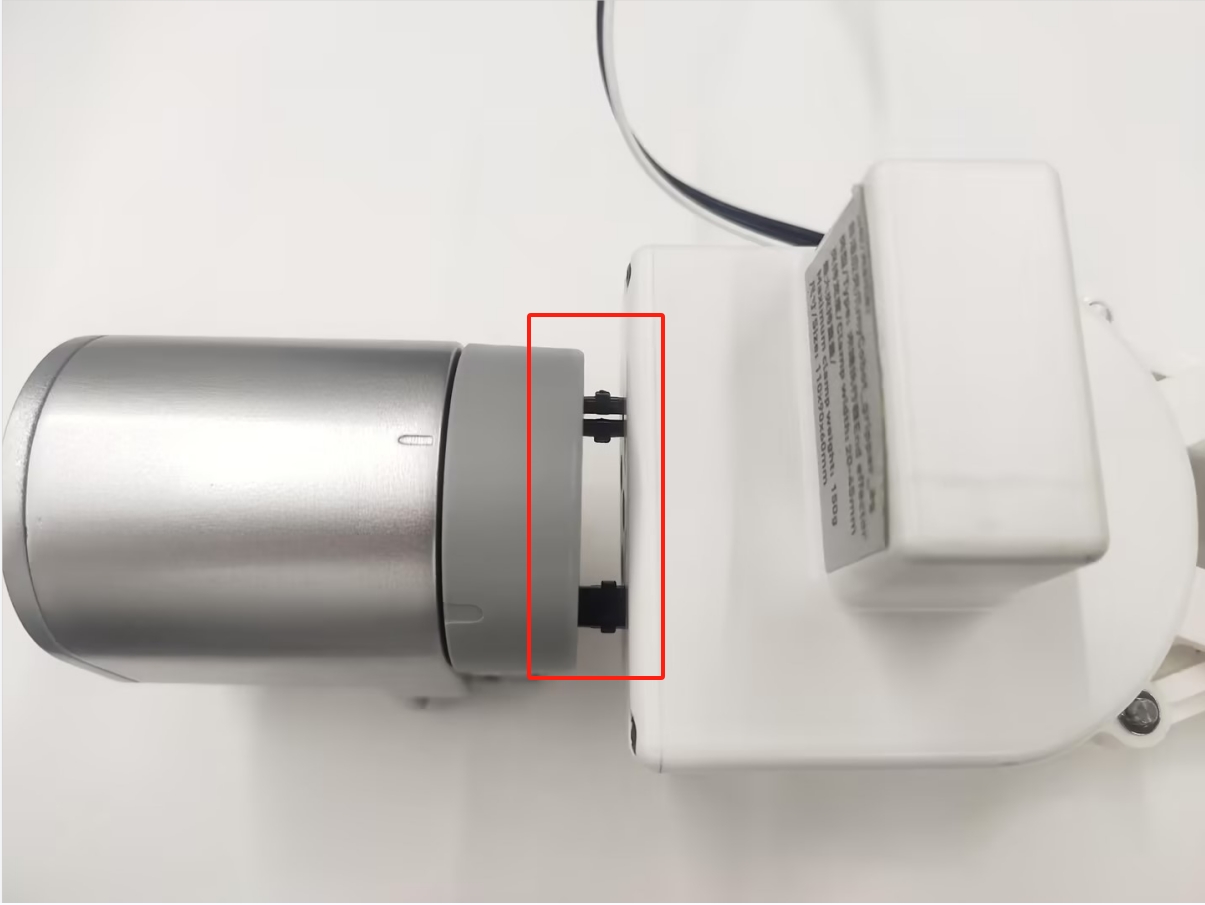
乐高连接键的两侧都插紧
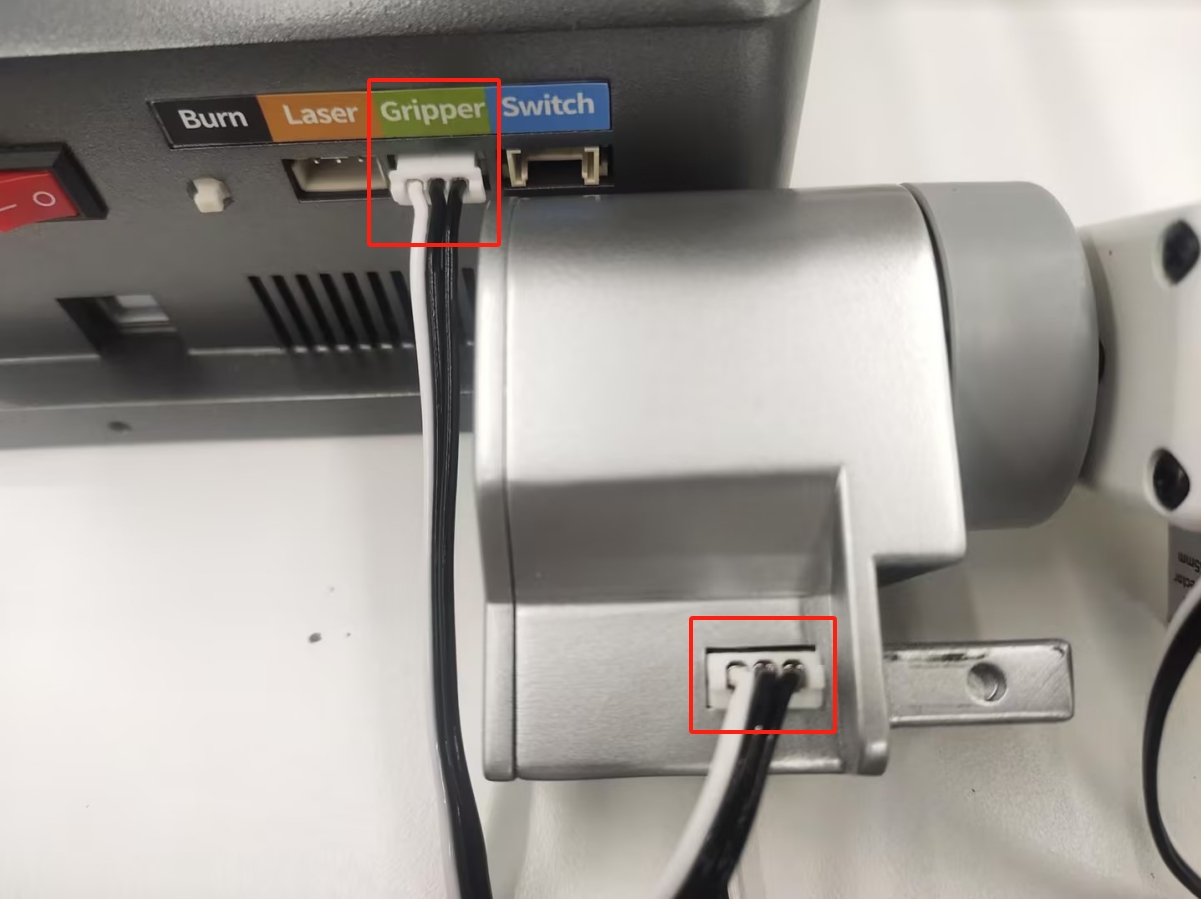
将夹爪的线接到快换舵机的任意一个接口上

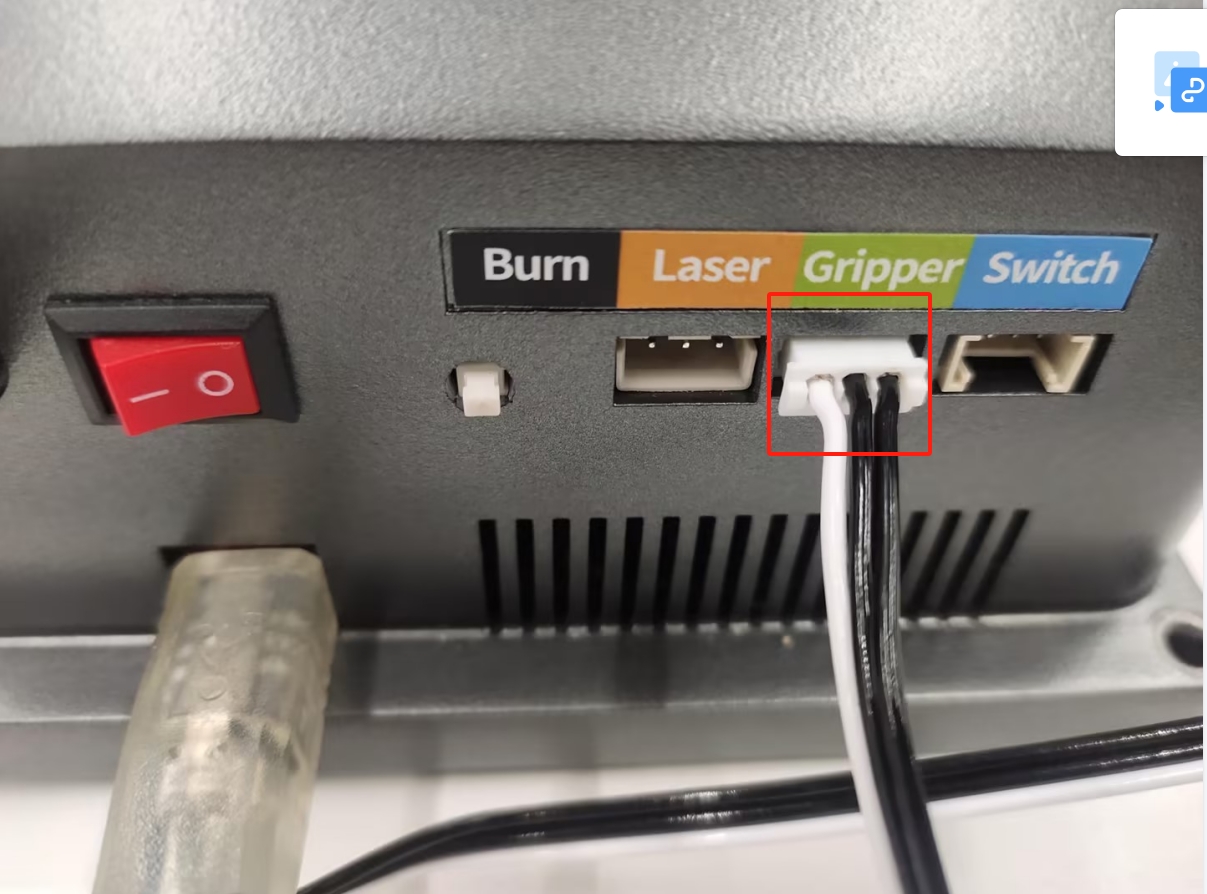
将快换舵机线接入到快换舵机的另一侧接口上,然后接入到机械臂底座的夹爪插口上
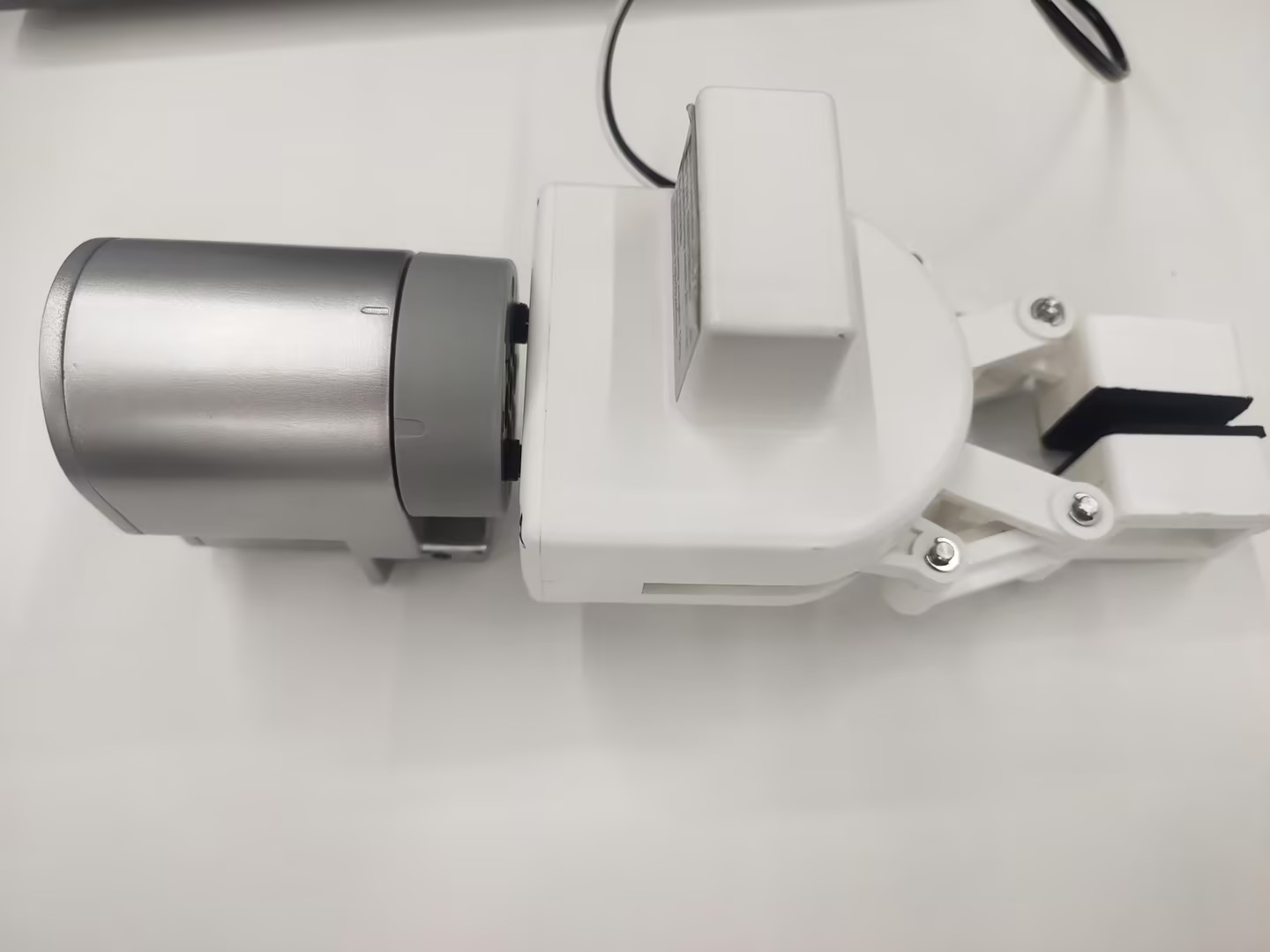
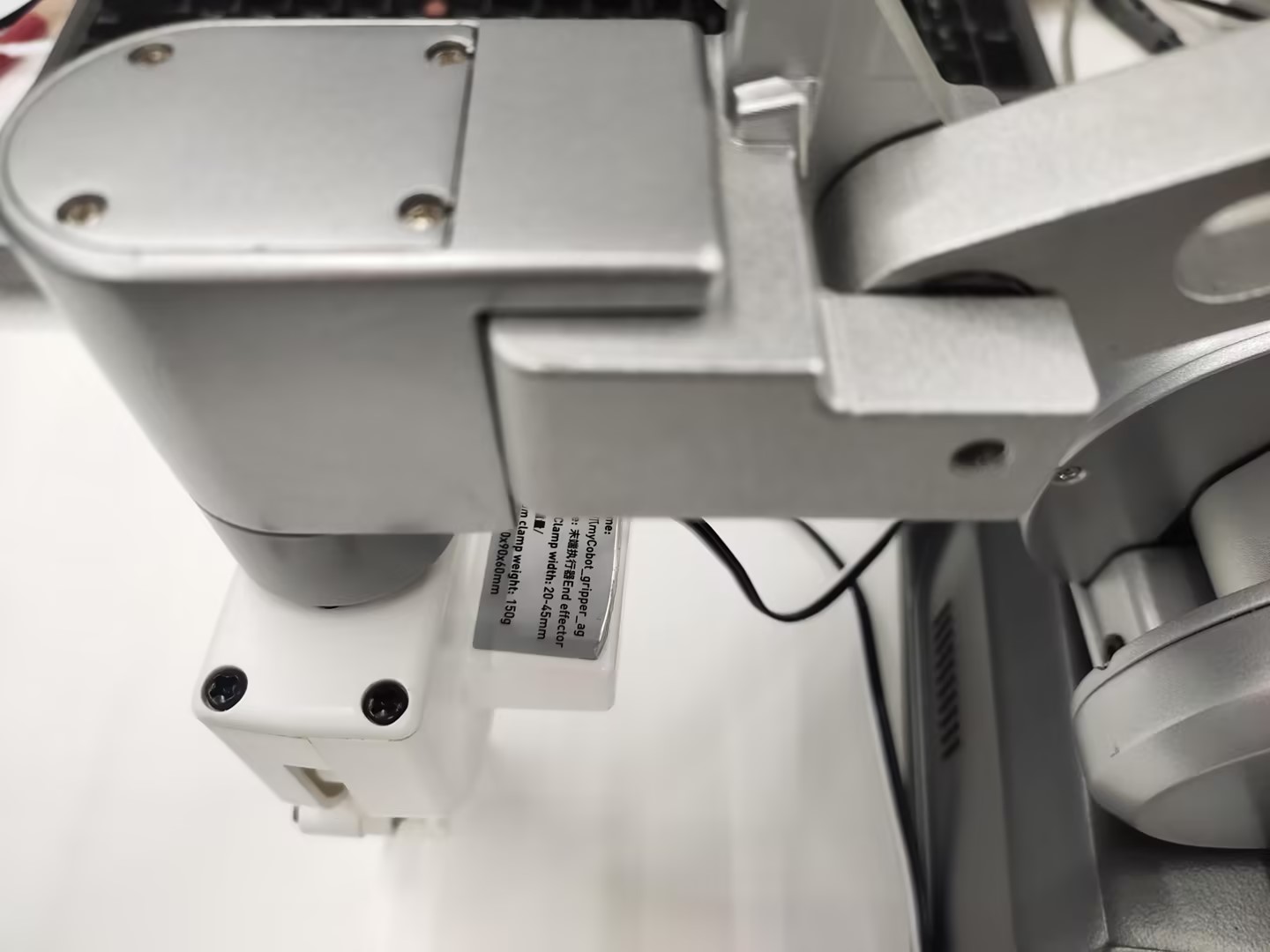
将快换舵机安装到机械臂末端上

旧版本快换舵机+自适应夹爪
将乐高连接键的一侧插入夹爪中
然后乐高连接键的另一侧插入快换舵机中

乐高连接键的两侧都插紧

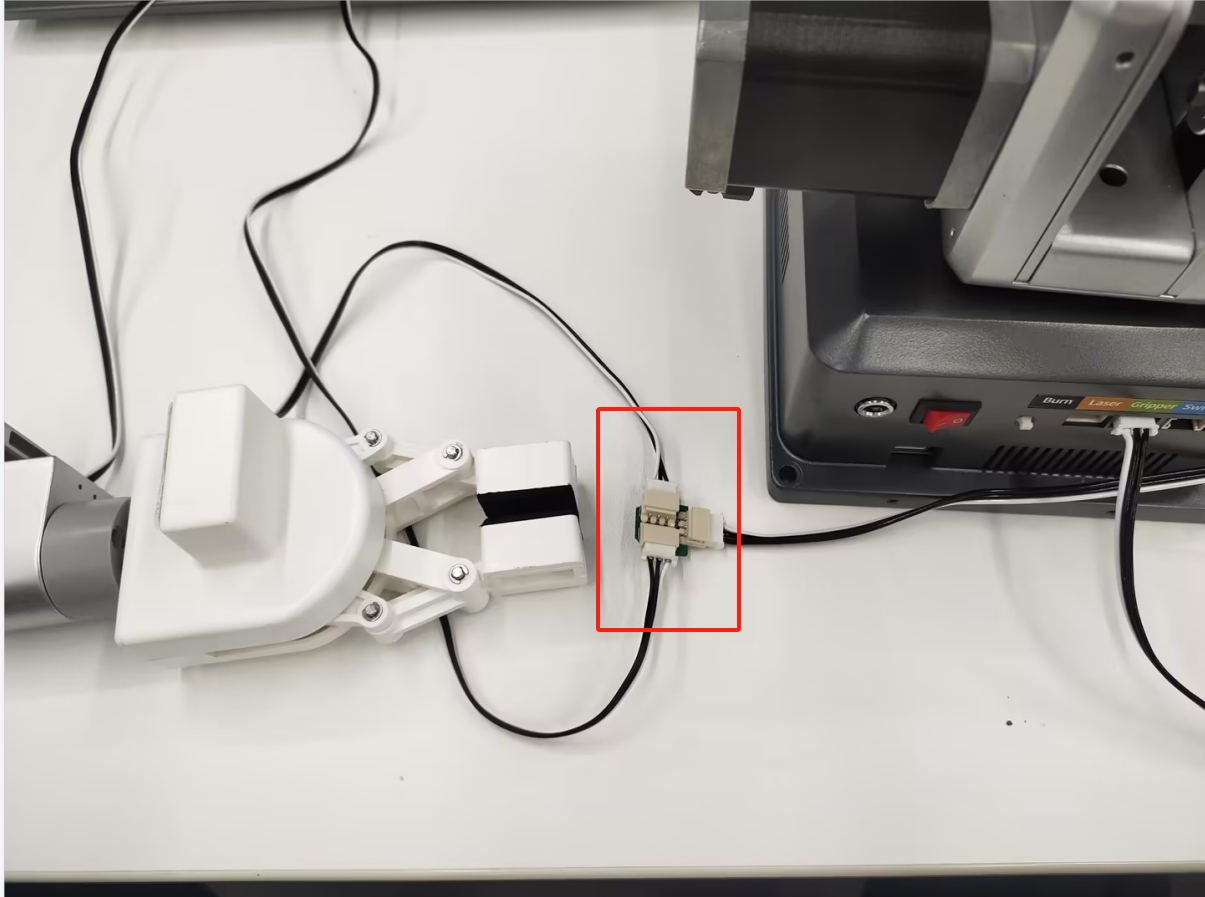
用一根3pin线连接到机械臂底座的夹爪插口上
将舵机线,夹爪线,机械臂底座的线,连接到转接板上
将快换舵机安装到机械臂末端上
2 Python案列程序
from pymycobot import ultraArm
# 连接机械臂,要填入机械臂实际的串口号
ua = ultraArm('COM13')
# 回零
ua.go_zero()
#控制快换舵机
ua.set_angle(4,90,90)
#控制夹爪
ua.set_gripper_state(50, 50)