控制坐标轴运动
开始前请确认:
1.已安装Python环境并下载了pymycobot包;
2.固件已烧录;
3.ultraArm开关已经打开。
本章学习内容
使用myBlockly控制ultraArm坐标轴运动。
API模块介绍

- 方法模块1:
设置单座标轴 - 目的:仅设置X、Y、Z轴坐标
参数:
- 坐标轴参数:可选择X、Y、Z坐标
- 坐标参数:范围为-300-300
- 速度参数:范围为0-100
方法模块2:
设置坐标X()Y()Z()- 目的:同时设置X、Y和Z轴坐标
参数:
- 坐标轴参数:可以同时分别设置X、Y和Z轴坐标
- 速度参数:范围为0-100
方法模块3:
设置当前位置为零点- 目的:将机械臂当前坐标设置为零点
- 参数:
- 坐标轴参数:可以同时分别设置X、Y和Z轴坐标
简单演示
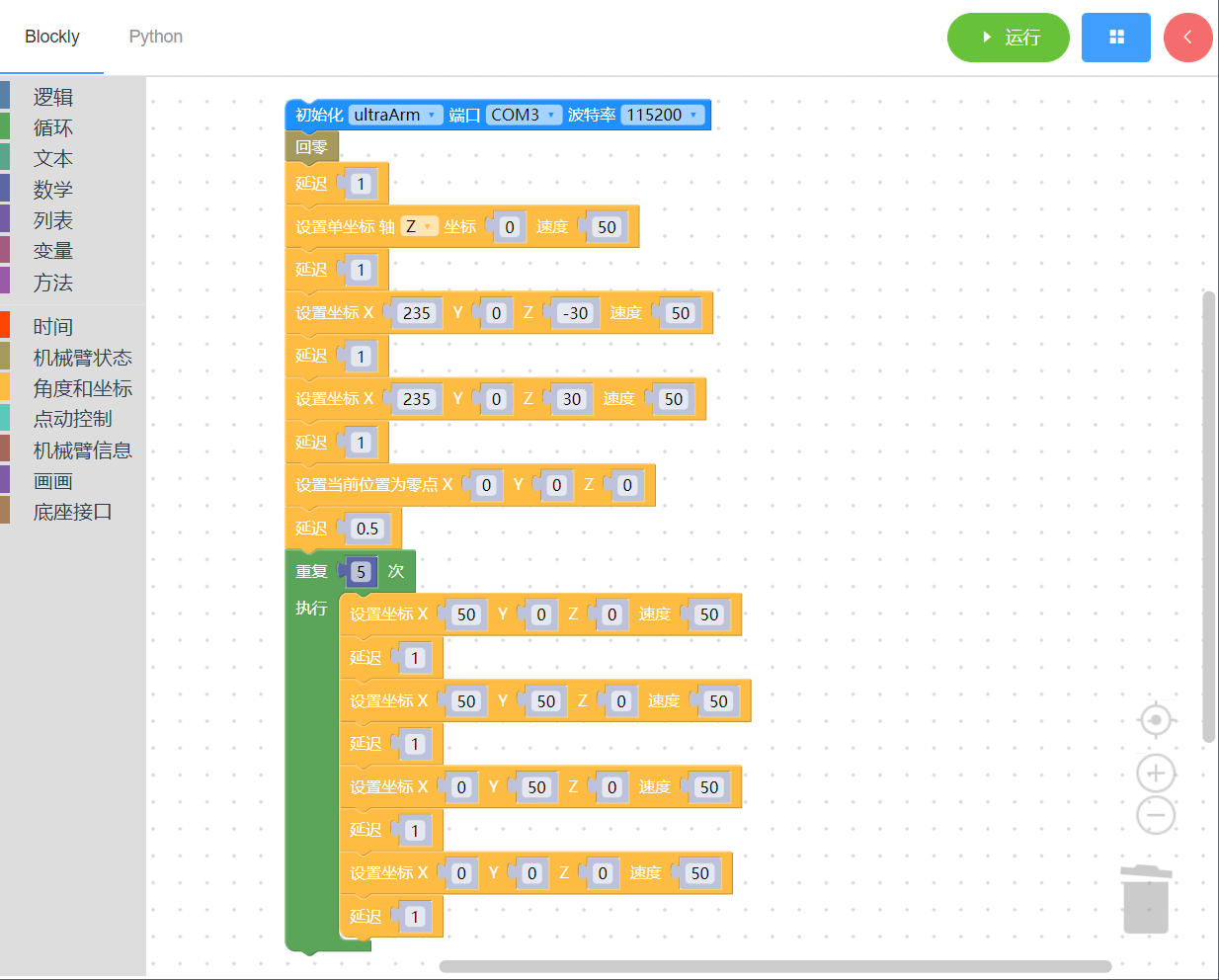
实现动作:机械臂回零,延迟1秒后,Z轴以50速度移动至0,1秒后,Z轴以速度50移动至-30,1秒后,Z轴以速度50移动至30,1秒后,Z轴以速度50移动至0,1秒后,将当前位置设置为零点,0.5秒后,在零点重复五次画50×50矩形动作。