myCobot PRO 600 Moveit
mycobot_600_moveit has integrated the MoveIt section.
Open the command line and run:
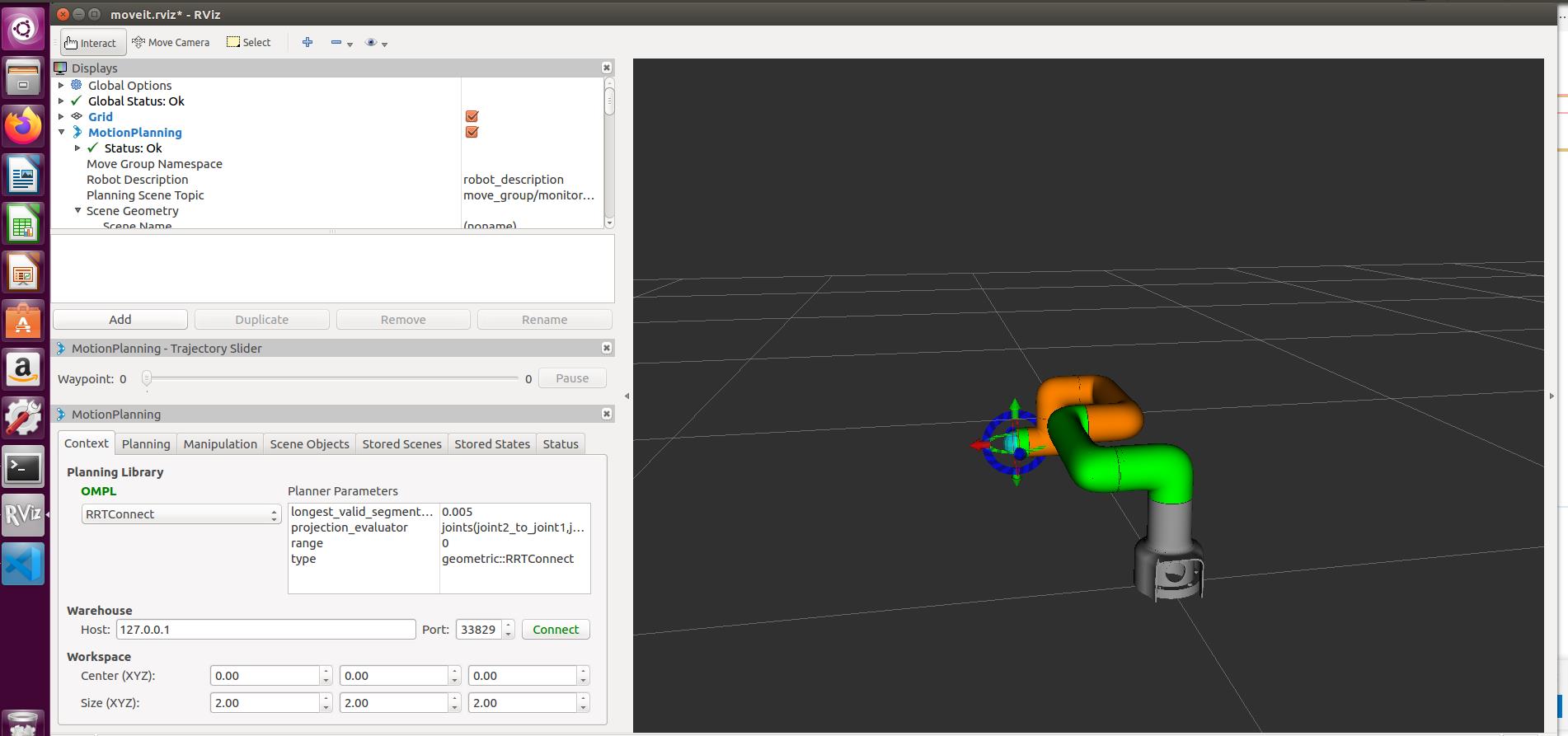
roslaunch mycobot_600_moveit mycobot600_moveit.launch
The operation effect is as follows:
If you want a real robot arm to execute a plan synchronously, you need to open another command line and run:
# # The default IP of mycobot pro 600 is "192.168.10.159" and the port number is 5001. The specific IP is subject to the network connected to the actual robot arm.
rosrun mycobot_600_moveit sync_plan.py