Using MyCobot
mycobot_ros has integrated the MoveIt section.
Open the command line and run:
- 2022 mycobot 320-M5 version:
roslaunch new_mycobot_320_moveit mycobot320_moveit.launch
- 2022 mycobot 320-Pi version:
roslaunch new_mycobot_320_pi_moveit mycobot320_moveit.launch
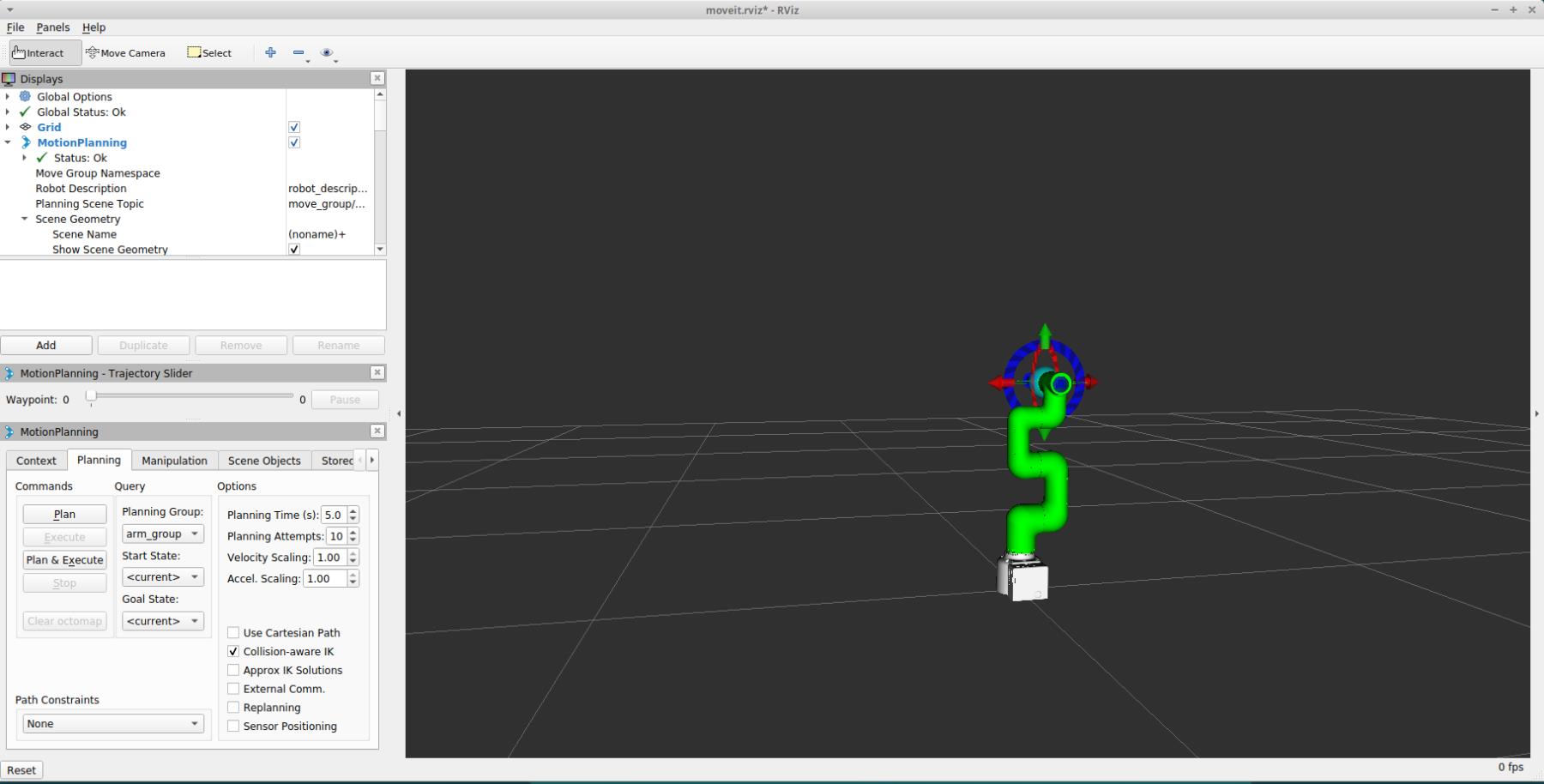
The operation effect is as follows:
If you want a real robot arm to execute a plan synchronously, you need to open another command line and run:
- 2022 mycobot 320-M5 version:
# The default serial port name of 2022 mycobot 320-M5 version is "/dev/ttyUSB0", and the baud rate is 115200. The serial port name of some models is "dev/ttyACM0". If the default serial port name is wrong, you can change the serial port name to "/dev/ttyACM0".
rosrun new_mycobot_320_moveit sync_plan.py _port:=/dev/ttyUSB0 _baud:=115200
- 2022 mycobot 320-Pi version:
# The default serial port name of 2022 mycobot 320-Pi version is "/dev/ttyAMA0", and the baud rate is 115200.
rosrun new_mycobot_320_pi_moveit sync_plan.py _port:=/dev/ttyAMA0 _baud:=115200