myCobot 320 M5

1 Profile
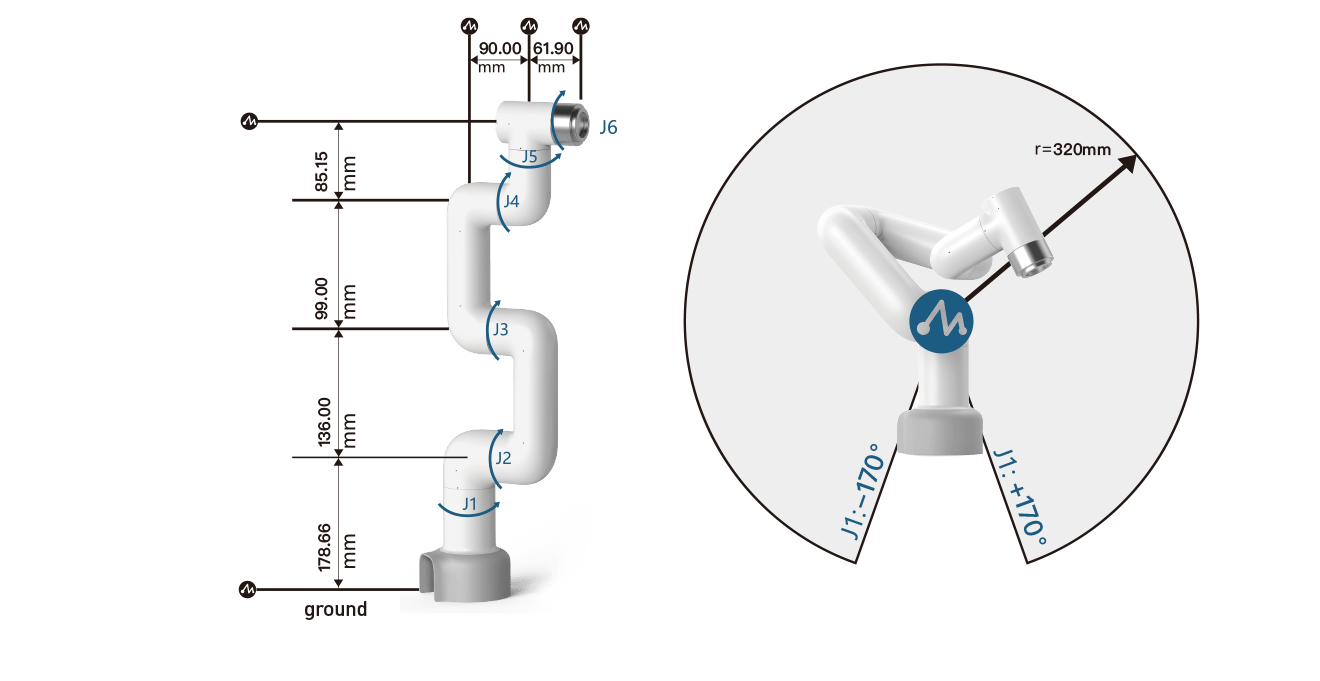
Updated from myCobot 280, myCobot 320 M5 can be redeveloped depending on users\' demands with delicate structure and all-in-one design. myCobot 320 for M5 weights 3kg with a load of 1kg and working radius of 320mm. The small-sized product is endowed with powerful functions and is characterized by easy operation, and the ability to work with human safely.
2 Product Parameters
| Indicator | Parameter |
|---|---|
| Name | myCobot 320 M5 |
| Model | myCobot 320-M5 |
| Effective working radius | 320mm |
| Efficient Load | 1kg |
| Effective Arms Span | 320mm |
| Repeated Positioning Precision | ±0.5mm |
| Net Weight | 3kg |
| Power Input | 24V,5A |
| Operational Environment | -5°~45° |
| Communications | 网口母口 USB Type-C |
| End IO | D-INPUT x2 D-OUTPUT x3 |
3 Product Performance
- Easy to operate and open-source
- Users can operate the robot via myBlockly and dragging teaching easily after quick-start learning.
- It supports the development systems, such as ROS and moveIt.
- Economical and cost-effective
- It adopts a standardized 8-hour working system so as to replace human in doing repetitive and standard jobs.
- Worth over 10,000 RMB, it reduces costs and synergizes efforts for high-efficiency scientific research.
- Powerful performance and equipped with two screens
- It adopts a brushless DC servo so as to realize repeated positioning precision of ±0.5mm.
- The body is equipped with two screens and supports M5 ecological applications, effectively expanding coordinative application.
- On-in-all design and safe collaborative work
- With delicate structure, it optimizes space and integrates with application in a coordinated way.
- It also has kinematics self-interference detection, which can effectively avoid motion collisions.
4 Application Scenarios
myCobot 320 M5 is not only a tool for production but also a tool to expand imagination boundary. It means it can work with multiple types of end effectors to adapt to a variety of application, such as scientific research, education and function showing, etc. The user experience is excellent.
5 Development Support
- 3 Quick learning of robot arm knowledge
- 4 Basic function application
- 5 Blockly Development Guide
- 5.1 myblockly
- 5.1.1 Controlling the RGB light board
- 5.1.2 Controlling the robot arm to make it return to the origin
- 5.1.3 Controlling single-joint motion
- 5.1.4 Controlling multiple joints
- 5.1.5 Controlling the robot arm to make it sway left and right
- 5.1.6 Controlling the robot arm to make it dance
- 5.1.7 Gripper installation and use
- 5.1.8 Installation and use of sucking pump
- 5.1 myblockly
- 6 Roboflow Development Guide
- 7 Python Development Guide
- 12 ROS Development Guide
- 13 Use of senior packages
- 14 FAQ