Setting All Arms to Starting Point
Preparation
M5Stack series: Make sure robot is connected with PC (Go to 5.1 myBlockly for more information).
Other series: Make sure the robot is in normal status.
Purpose for this section
This section introduces instructions for setting all arms to starting point.
Introduction to API
Set Angle ()
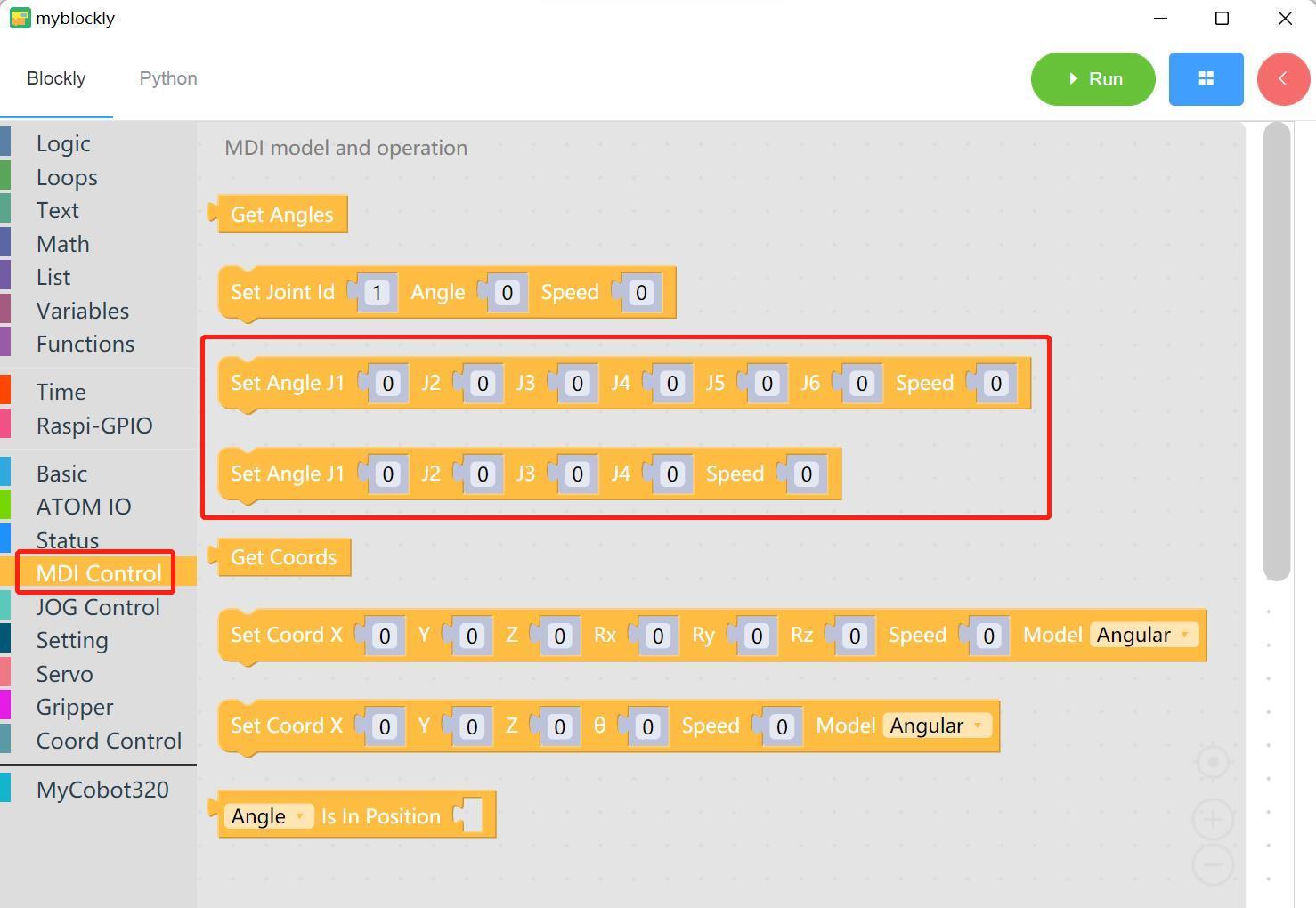
- Applicable to six-axis robots (myCobot 280 series, mechArm series and myCobot 320 series)

- Applicable to four-axis robots (myPalletizer series)

Parameters:
Joint angle: if arms are set to starting point, set parameters of angles as
0Speed: Refer to 2 Products Profile
Function: Set all arms to the starting point (Angle
0)
Simple demo
- Program for display
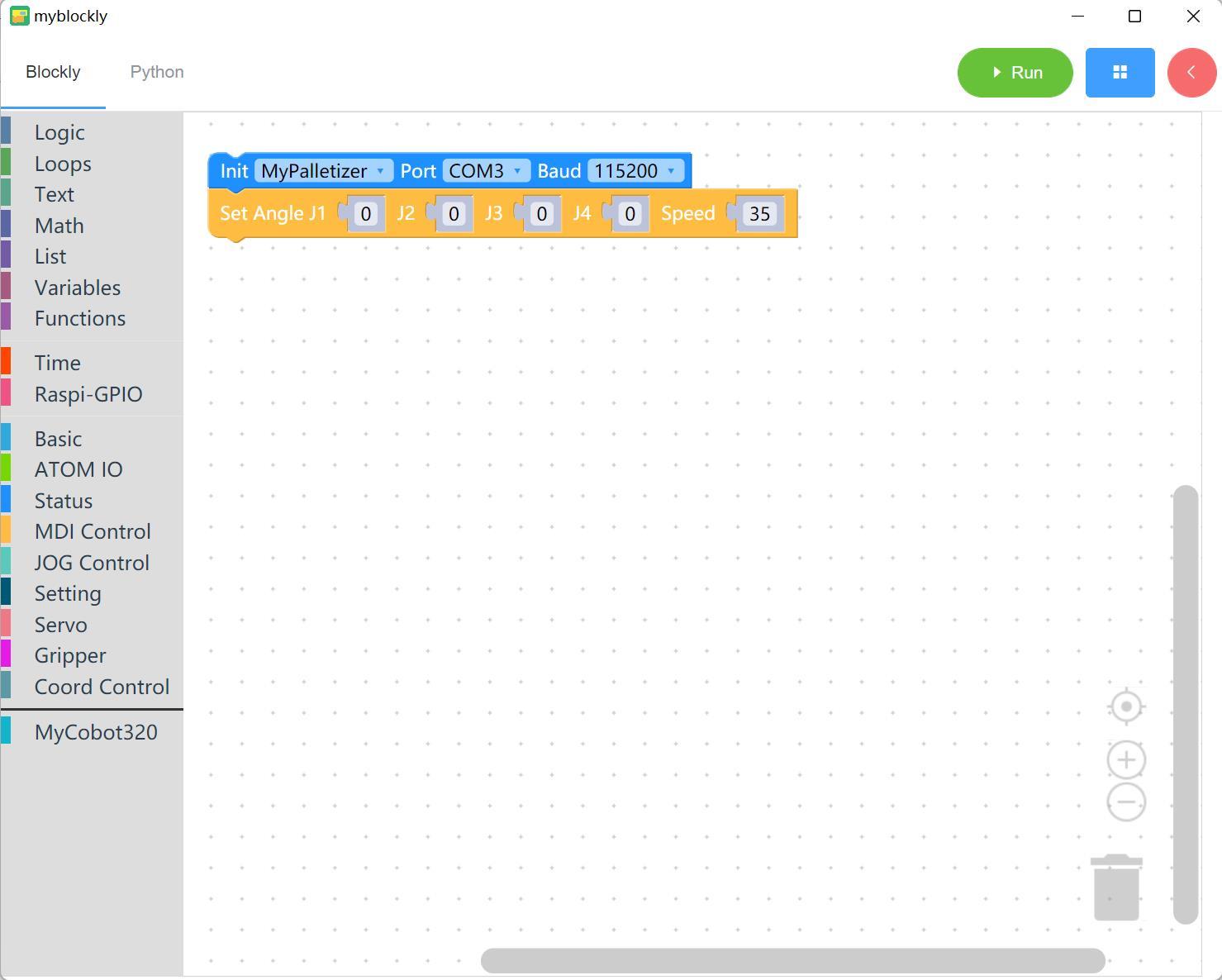
Motion:
All arms move to its starting point in 35 seconds.