myBuddy Moveit
mycobot_ros has integrated the MoveIt section.
Click the ROS1 Shell icon on the desktop or the corresponding icon in the lower bar of the desktop to open the ROS1 environment terminal:



Then run the command:
roslaunch mybuddy_moveit demo.launch
If you want a real robot arm to execute a plan synchronously, you need to open another ROS1 environment terminal:
Then run the command:
# The default serial port name of the mybuddy is "/dev/ttyACM0", and the baud rate is 115200".
rosrun mybuddy_moveit sync_plan.py _port:=/dev/ttyACM0 _baud:=115200
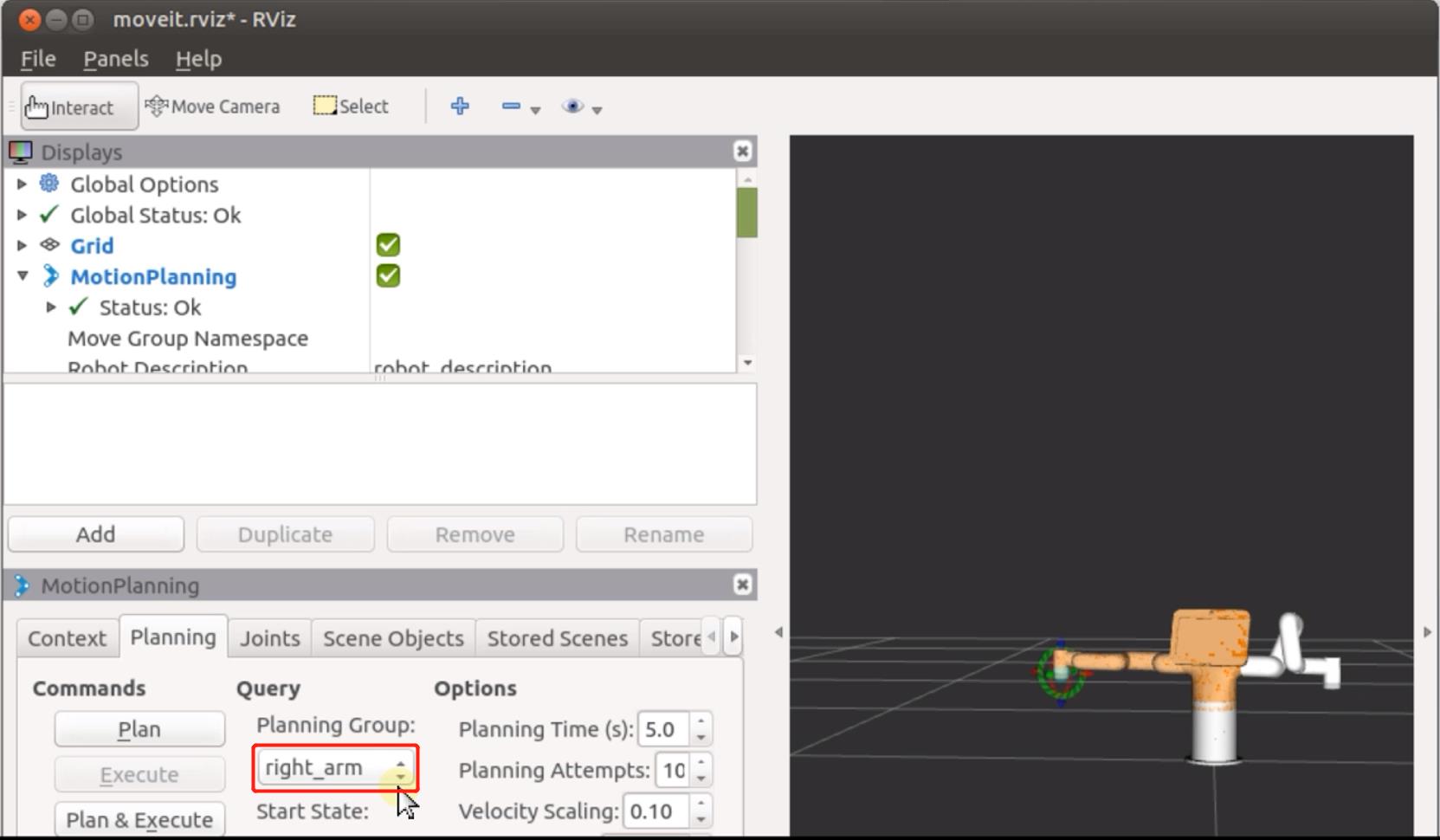
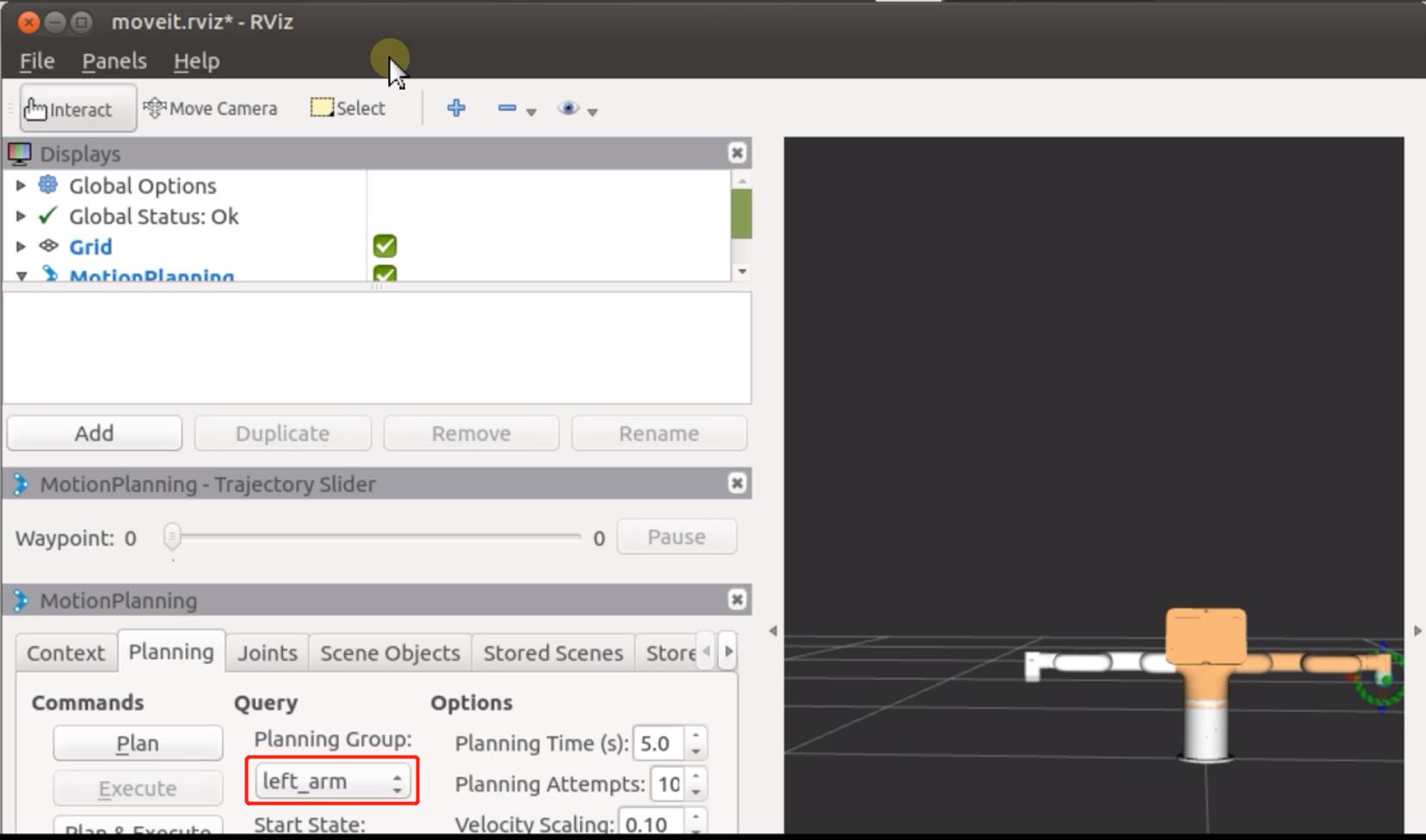
Moveit has four control groups, the operation effect is as follows:
1.Left Arm Control Group: plan the movement direction of left arm by dragging the trackball.
2.Right Arm Control Group: plan the movement direction of right arm by dragging the trackball.