Swinging Arms Left and Right
Preparation
M5Stack series: Make sure robot is connected with PC (Go to 5.1 myBlockly for more information).
Other series: Make sure the robot is in normal status.
Purpose for this section
This section introduces instructions for swinging arms left and right.
Introduction to API
power_on()
Applicable to myCobot 280 series, mechArm series, myCobot 320 series and myPalletizer series
Function: initiate system
release_all_servos()
Applicable to myCobot 280 series, mechArm series, myCobot 320 series and myPalletizer series
- Function: set robot arm into free moving mode
Simple Demo
Program for display:
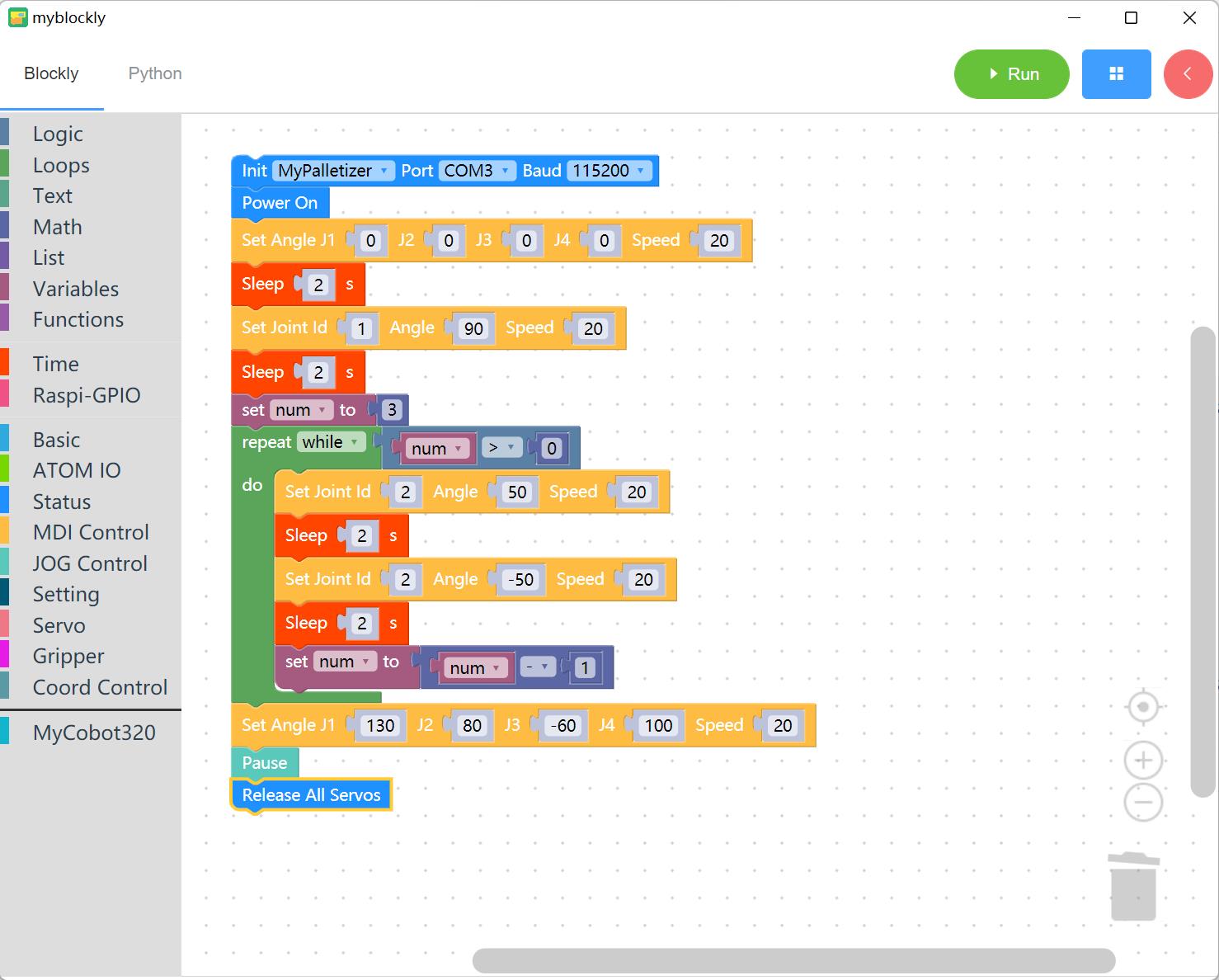
Motion:
Initiating system, arms move to starting point, after 2 seconds,
Joint 1 move to 50 degree at the speed of 20, after 2 seconds,
Joint 2 move to -50 degree at the speed of 20, after 2 seconds,
the above process loops again,
Joint 1, Joint 2, Joint 3 and Joint 4 move to 130 degree, 80 degree, -60 degree and 100 degree respectively.
Motion stops, and then all servos release.