Use environment
Before use, the environment needs to be set up. For details, please refer to 12.1.2 Environment Building chapter.
- ROS1 version support: Ubuntu 20.04 / ROS1 Noetic
- Project address: https://github.com/elephantrobotics/mycobot_ros/tree/noetic/Mira
Control of the robotic arm
1 Slider control
Open a command line and run:
# Mira default serial port name is "/dev/ttyUSB0", baud rate is 115200.
roslaunch mira slider_control.launch
It will open rviz and a slider component, you will see the following screen:
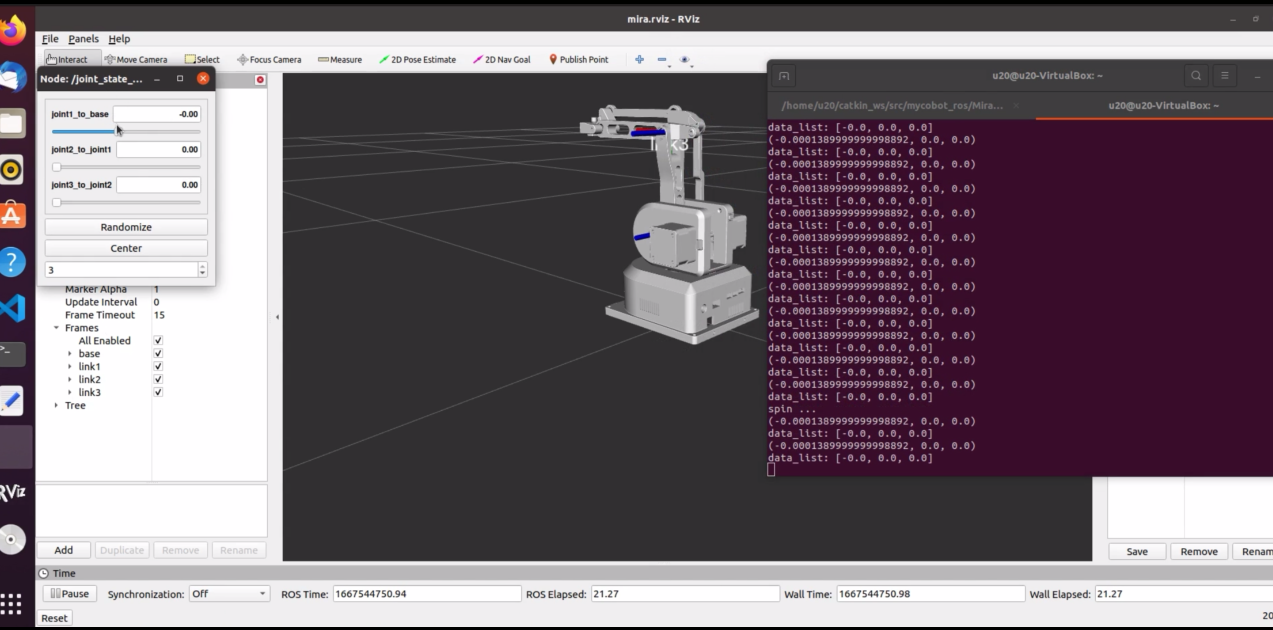
Then you can control the movement of the model in rviz by dragging the slider. If you want the real mira to move with it, you need to open another command line and run:
# Mira default serial port name is "/dev/ttyUSB0", baud rate is 115200.
rosrun mira slider_control.py
Please note: Since the robot arm will move to the current position of the model when the command is input, please make sure that the model in rviz does not appear to be through the mold before you use the command Do not drag the slider quickly after connecting the robotic arm to prevent damage to the robotic arm