关节控制和坐标控制
RoboFlow中关节和坐标控制在QuickMove页面中,运行RoboFlow,进入程序编辑界面,选择Tools--QuickMove(如何进入程序编辑界面,请看6.2 RoboFlow 简单使用)。控制机械臂运动方式分为连续运动、步进运动,连续运动按着按钮直到释放按钮,机械臂才会停止运动;步进运动,设置好增量,机械臂到达点位就会停止。
1 关节控制
Joint Control为关节控制,Joint1-6分别对应关节1-6(myPalletizer 260是四个关节,Joint1-4分别对应关节1-4)
功能说明:
1.1 speed处选择连续运动(Continue Motion)或者步进运动(Discrete Motion),如果时步进运动需要设置增量值;
1.2 Joint Control处每个关节都有加减角度按钮,减小角度按减号这边的按钮,加大角度按加号这边的按钮。连续运动,按下按钮后,直到释放按钮才会停止(达到限位后也会停止),步进运动到达点位就会停止(比如关节1现在角度30,增量值50,按下减号这边按钮,那么机械臂运动到-20就会停止),具体步骤如下图所示:
2 坐标控制
注意:使用坐标控制前,需要先按着home按钮(280需要按着home按钮,320点击一下home按钮即可),让机械臂达到一定的姿态,到达姿态后,再点击home按钮,会提示“机械臂已到达要求的点位”。
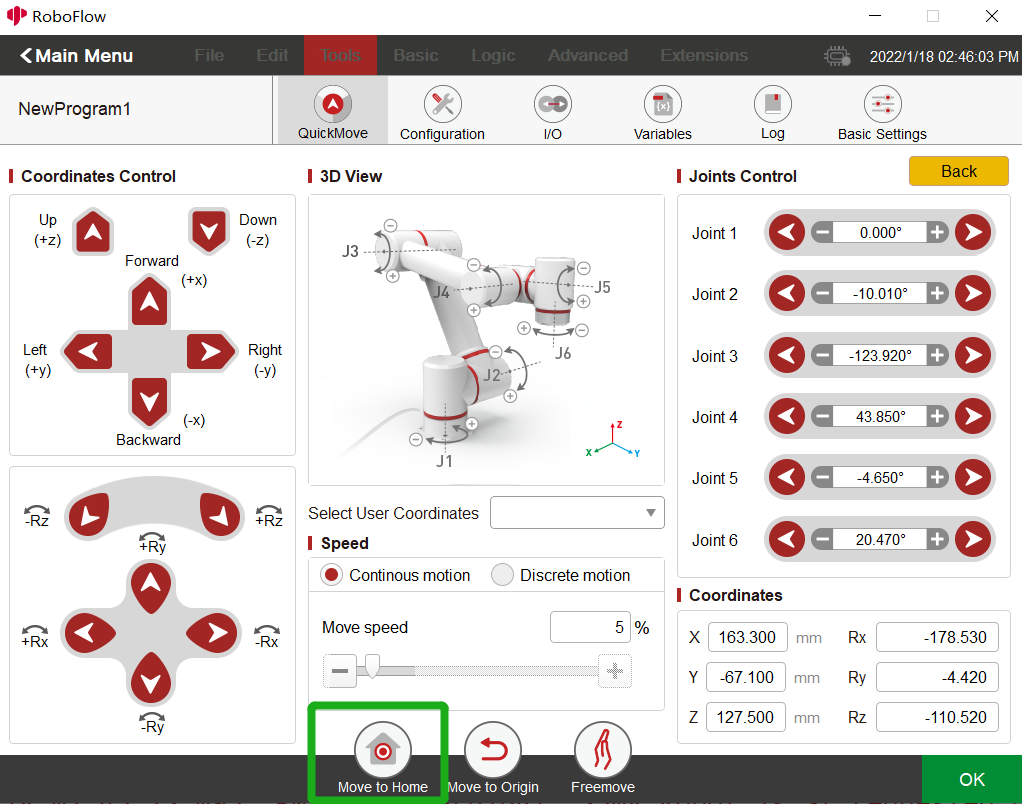
Coordinates Control为坐标控制
功能说明:
2.1 speed处选择连续运动(Continue Motion)或者步进运动(Discrete Motion),如果时步进运动需要设置增量值;
2.2 Coordinates Control处每个坐标轴都有加减按钮,减小按减号这边的按钮,加大按加号这边的按钮。连续运动,按下按钮后,直到释放按钮才会停止(达到限位后也会停止),步进运动到达点位就会停止(比如X轴现在坐标30,增量值50,按下加号这边按钮,那么机械臂运动到80就会停止),具体步骤如下图所示: