使用MoveIt
mycobot_ros 现已集成了 MoveIt 部分。
打开命令行运行:
- 2022 mycobot 320-M5版本:
roslaunch new_mycobot_320_moveit mycobot320_moveit.launch
# 如果末端装配自适应夹爪,则运行(仅支持M5版本):
roslaunch new_mycobot_320_gripper_moveit mycobot320_gripper_moveit.launch
- 2022 mycobot 320-Pi版本:
roslaunch new_mycobot_320_pi_moveit mycobot320_moveit.launch
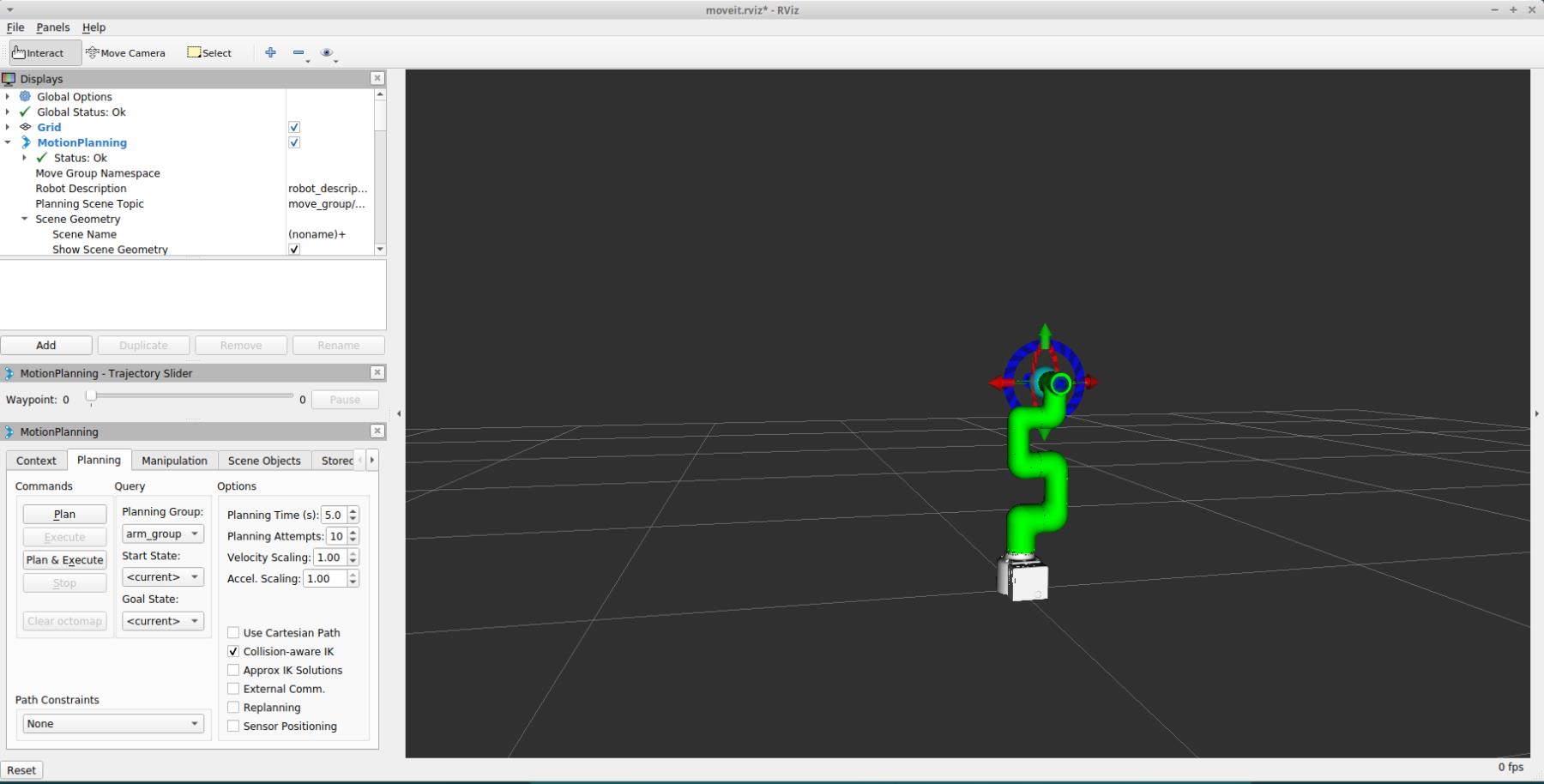
运行效果如下:
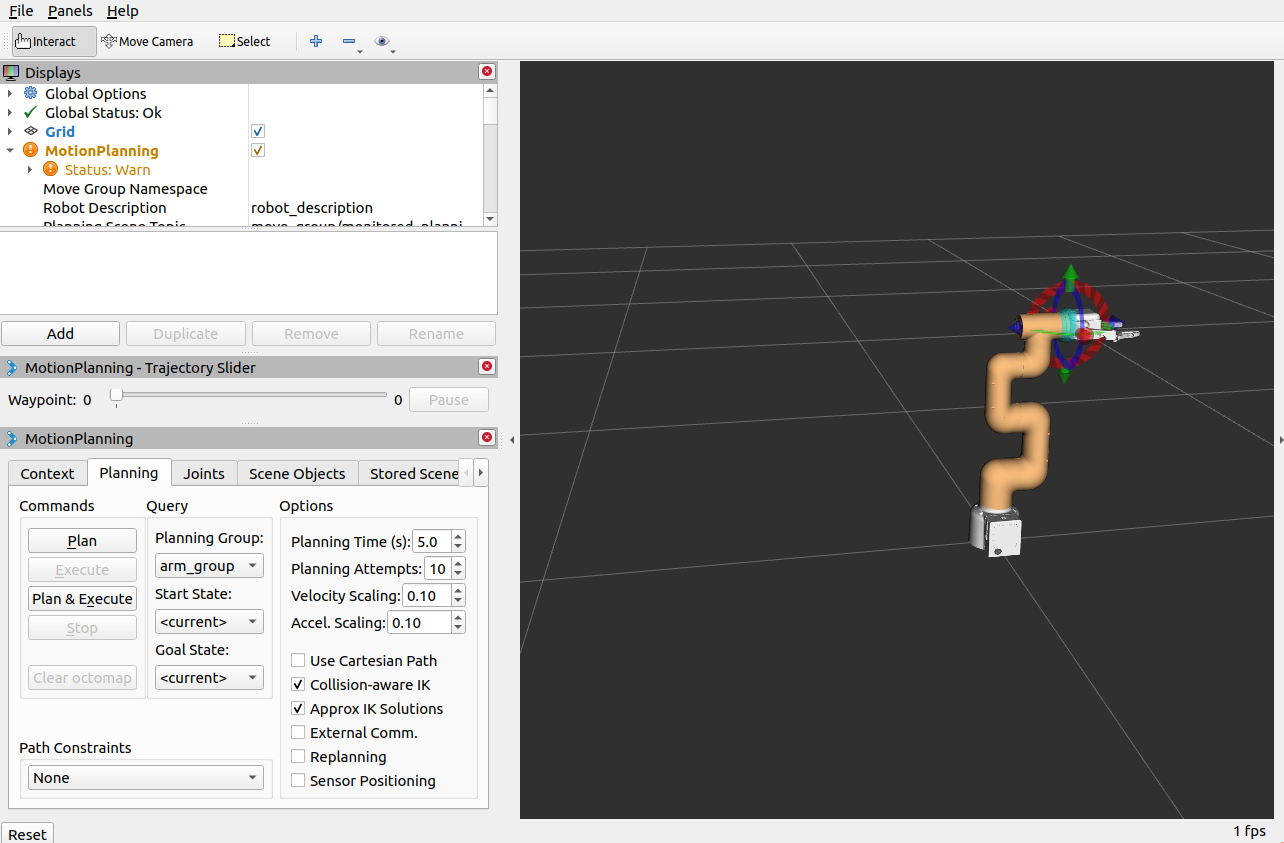
如果末端装配自适应夹爪,运行效果如下:
 >
>
如果需要让真实的机械臂同步执行计划,需要再打开一个命令行,运行:
- 2022 mycobot 320-M5版本:
# 2022 mycobot 320-M5版本默认串口名为"/dev/ttyUSB0",波特率为115200.部分机型的串口名为 "dev/ttyACM0",若默认串口名发生错误,可将串口名改为"/dev/ttyACM0".
rosrun new_mycobot_320_moveit sync_plan.py _port:=/dev/ttyUSB0 _baud:=115200
# 如果末端装配自适应夹爪,则运行(仅支持M5版本,串口修改同上):
rosrun new_mycobot_320_gripper_moveit sync_plan.py _port:=/dev/ttyUSB0 _baud:=115200
- 2022 mycobot 320-Pi版本:
# 2022 mycobot 320-Pi版本默认串口名为"/dev/ttyAMA0",波特率为115200.
rosrun new_mycobot_320_pi_moveit sync_plan.py _port:=/dev/ttyAMA0 _baud:=115200
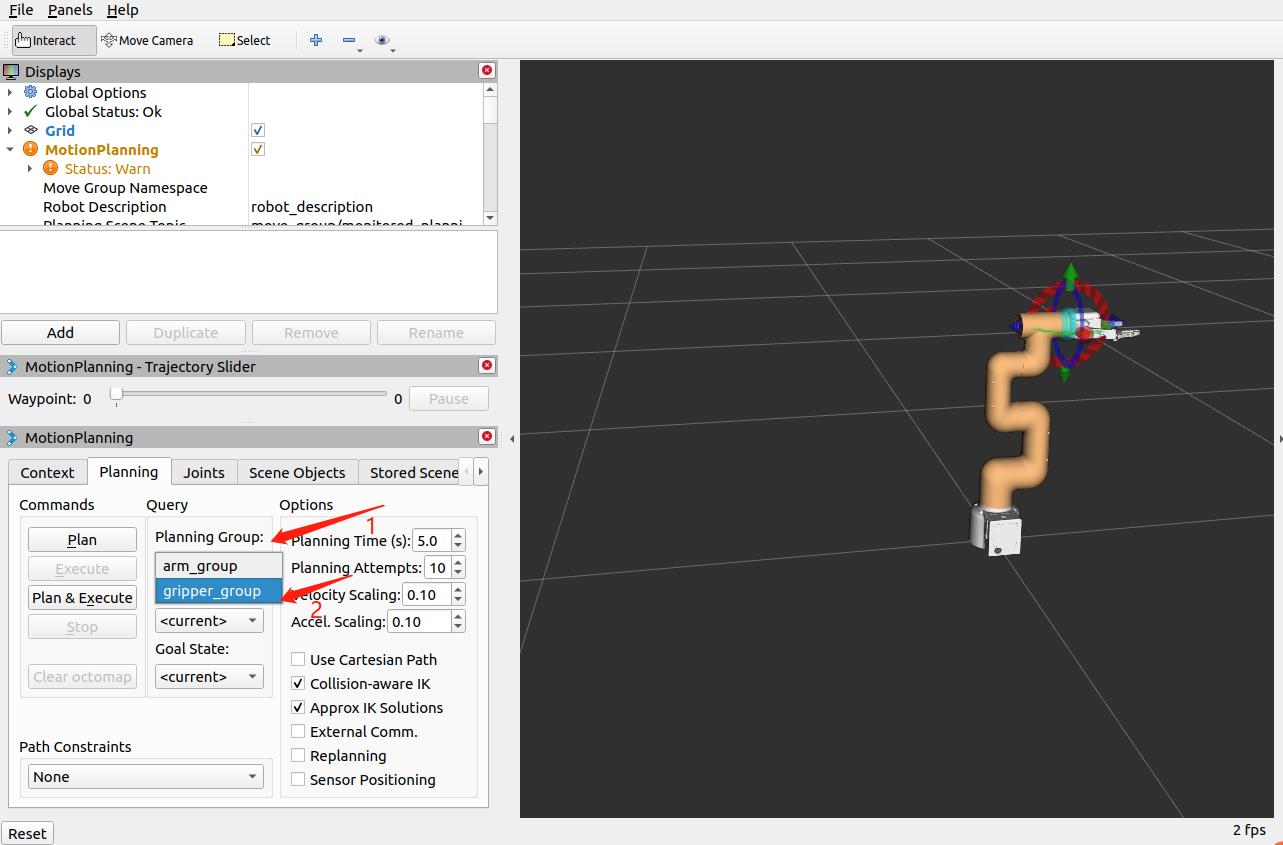
注意: 如果末端装配自适应夹爪,需要对夹爪进行规划时,需要将规划组切换至夹爪的规划组。
 >
>