C++ 环境搭建
1 确认开发目标
MycobotCpp是一个和mycobot进行串口通讯的接口程序,调用的是我们公司自己开发的mycobot库,里面有简单的使用案例。如果您想通过c++进行自由开发,控制我们公司已经研发出来的机器人,那么它是您的选择。
支持的机械臂型号:myCobot 280-M5、myCobot 320-M5
运行MycobotCpp所需要的软件:vs2019、qt5.12.10、vsaddin(qt插件)。
2 Windows环境配置
2.1 安装vs2019
下载:
首先在官网下载vs2019。安装:
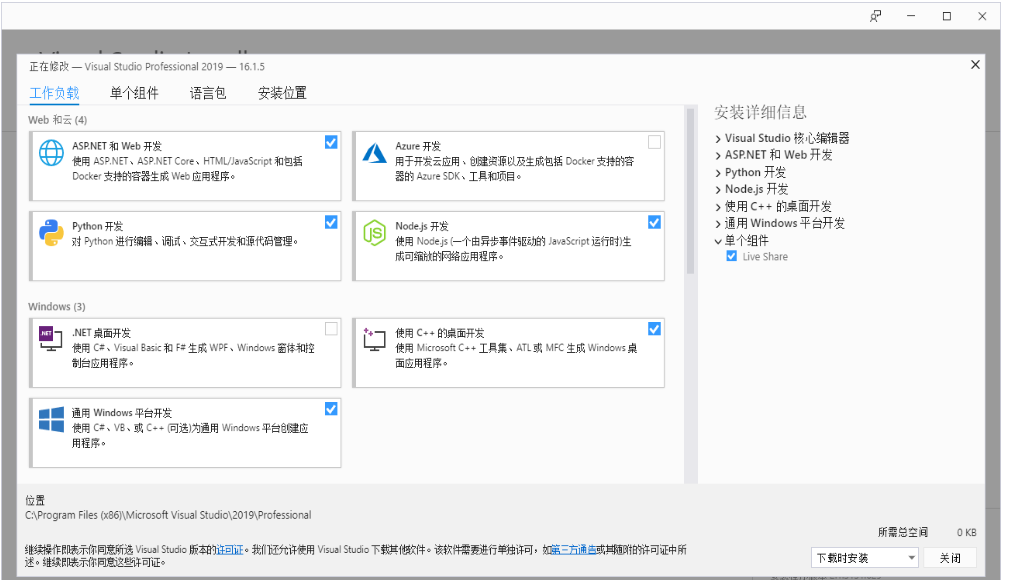
安装完成后,会出现下图所示界面,主要选择“通用Windows平台开发、使用C++的桌面开发、ASRNET和Web开发”这3个(此处只是建议,具体可根据自己的需求选择,vs2019安装时间较长)。
环境变量配置:
此电脑--》右键 属性--》高级系统设置--》环境变量--》看系统变量处,点击新建--》变量名:VCINSTALLDIR 变量值:找到Redist所在目录(如:D:\vs2019\VC),具体如下图所示:

2.2 安装qt5.12.10
下载:
下载qt5.12.10及以上版本都可以,具体操作如下图:
安装:
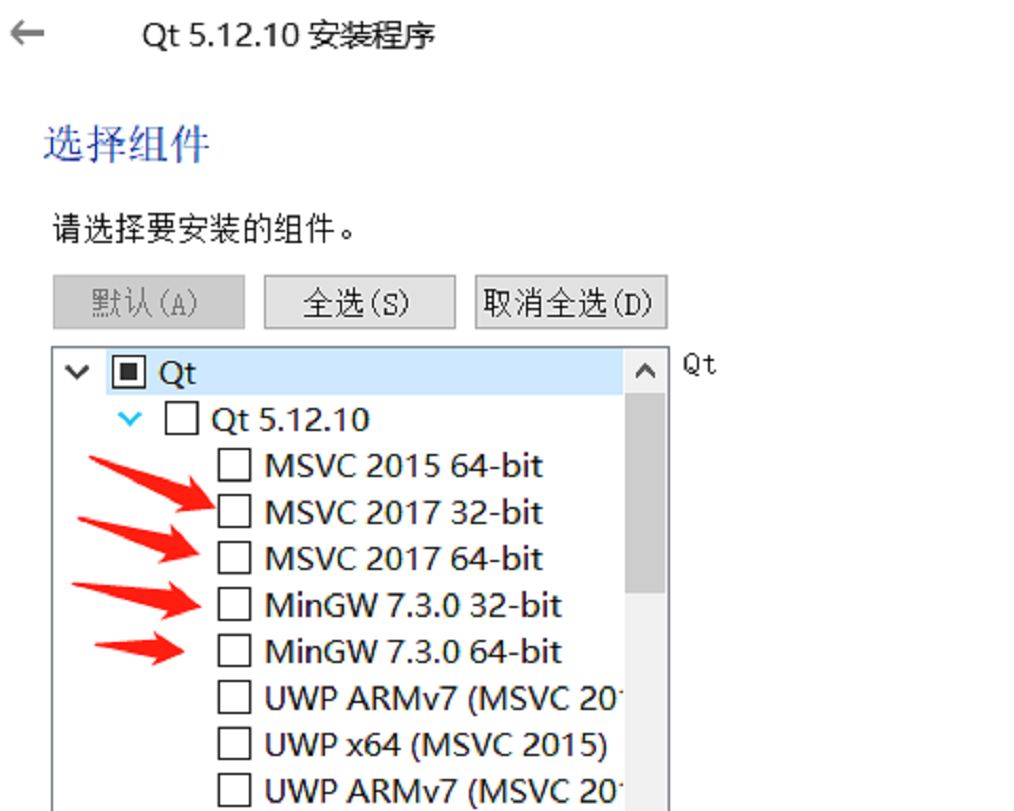
首先登录qt账号,没有就先注册。接下来会出现选择组件的界面,windows上选择MinGW和MSVC即可,具体如下图所示:
环境变量配置:
此电脑--》右键 属性--》高级系统设置--》环境变量--》看系统变量处,点击新建--》变量名:QTDIR 变量值:msvc2017_64所在目录(如:D:\qt5.12.10\5.12.10\msvc2017_64,具体看自己电脑的安装路径),具体如下图所示:

2.3 安装qt插件vsaddin
下载:
首先选择对应vs2019的vsaddin版本,具体操作如下图:
安装:直接安装即可
- 配置:
vs2019菜单栏 扩展--》QT VS ToolS--》QT Versions--》add new qtversion Path选择msvc2017_64所在路径(如:D:\qt5.12.10\5.12.10\msvc2017_64),具体操作如下图所示:
3 Linux环境配置
3.1 安装qt5.12.10
下载:
下载地址和Windows一样,选择linux上的安装包即可,具体可看上面的8.1.2.2。安装:
命令行安装:运行./“安装包名称”,如果没有执行权限,加执行权限:sudo chmod +x “安装包名称”,然后进入图形界面,和Windows一样;
图形界面安装:和Windows一样。
建议直接普通用户权限安装qt,安装成功后可以执行qmake --version,出现如下界面安装成功:
配置:
打开配置文件,普通用户安装qt:vi ~/.bashrc,root用户安装qt:vi ~/.profile。在配置文件中添加:export QTDIR=“qt所在目录”(如:export QTDIR=$HOME/Qt/5.12.10/gcc_64),具体如下图所示: