关于M5版本和PI版本机器的区别
M5
M5版本机器是大象机器人和深圳市明栈科技有限公司 - M5STACK 联合出品,采用Esp32核心处理器,带有两块显示屏幕和多个实体按键,是为用户应用于桌面级机械臂开发应用而设计,产品深度糅合M5扩展生态,根据我司提供开发环境教程,即可搭建UIFlow、python、Arduino等多种开发环境的一款机械臂
M5版本机身搭载两块显示屏,多个实体按键,底座以 M5Stack-basic 作为主控,末端以M5STACK Atom 作为副控
M5版本机器本身只具备 录制播放 功能,即录制动作&播放动作,如需进一步使用 UIFlow、python、Arduino 等方式进行开发,需连接PC进行开发,连接方式如下:
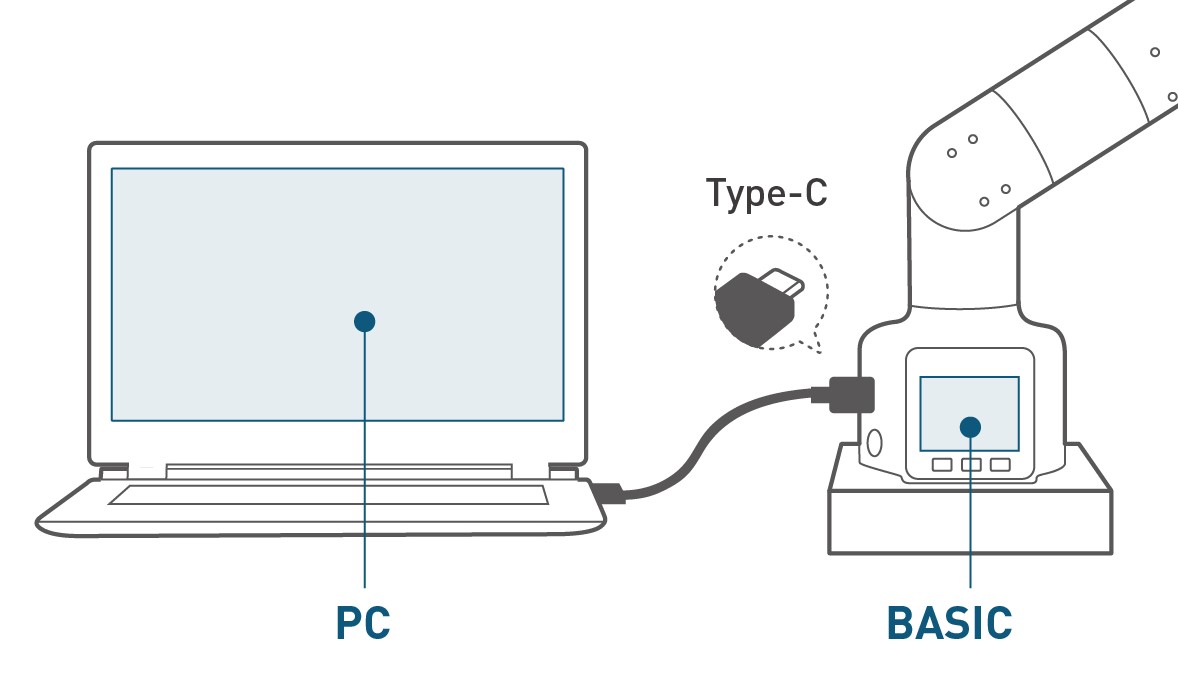
连接完成后,根据以下步骤打开机械臂通讯:
❗❗❗❗❗❗❗❗❗❗提示⚠:以下步骤极其重要,请一定要进行,不进行则机械臂无法正常通讯❗❗❗❗❗❗❗❗❗❗
❗❗❗❗❗❗❗❗❗❗提示⚠:以下步骤极其重要,请一定要进行,不进行则机械臂无法正常通讯❗❗❗❗❗❗❗❗❗❗
❗❗❗❗❗❗❗❗❗❗提示⚠:以下步骤极其重要,请一定要进行,不进行则机械臂无法正常通讯❗❗❗❗❗❗❗❗❗❗
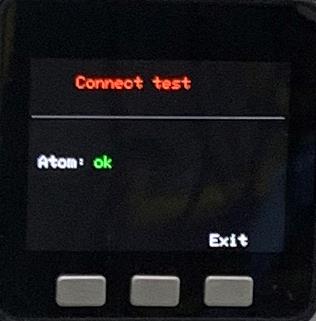
M5Stack-basic选择Transponder功能
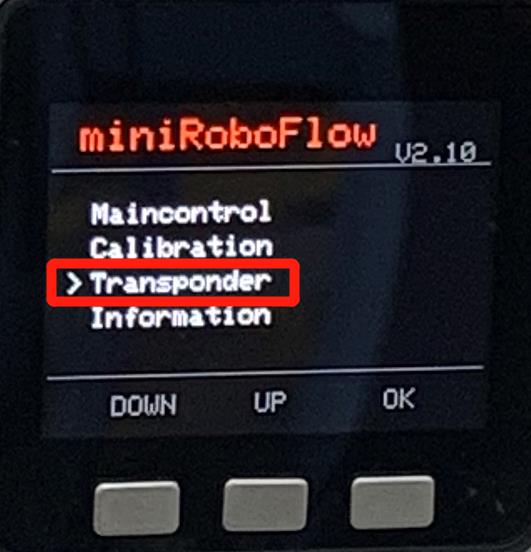

检测Atom的连接(ok表示连接正常,否则显示no)
❗❗❗❗❗❗❗❗❗❗提示⚠:到达此页面后,需要一直停留在此页面才可保持通讯❗❗❗❗❗❗❗❗❗❗
❗❗❗❗❗❗❗❗❗❗提示⚠:到达此页面后,需要一直停留在此页面才可保持通讯❗❗❗❗❗❗❗❗❗❗
❗❗❗❗❗❗❗❗❗❗提示⚠:到达此页面后,需要一直停留在此页面才可保持通讯❗❗❗❗❗❗❗❗❗❗
PI
PI版本机器是大象机器人和树莓派官方联名产品,机械臂采用树莓派 RaspBerry PI 4B 核心处理器,为应对客户Linux系统应用的需求,以及一体式集成机器人开发便捷的设备的需求而设计,产品保留了RaspBerry PI 4B 的原生硬件接口,同时设备内置 Ubuntu 18.04 操作系统, python、ROS、myBlockly 等多种开发环境,
PI版本机器内嵌树莓派4B,1.5GHz 4核微处理器,运行Debian/Ubuntu平台,支持4路USB,2路HDMI,标准化GPIO接口、TF卡可插拔
PI版本机器的本质是带有独立系统的开发板,是可以看做一个微型的电脑主机,主机和主机之间无法简单的通过一根线构成通讯。它只能连接到一台独立显示器上,并搭配电源、鼠标、键盘,进入到开发板内置的系统后对其进行开发和操作
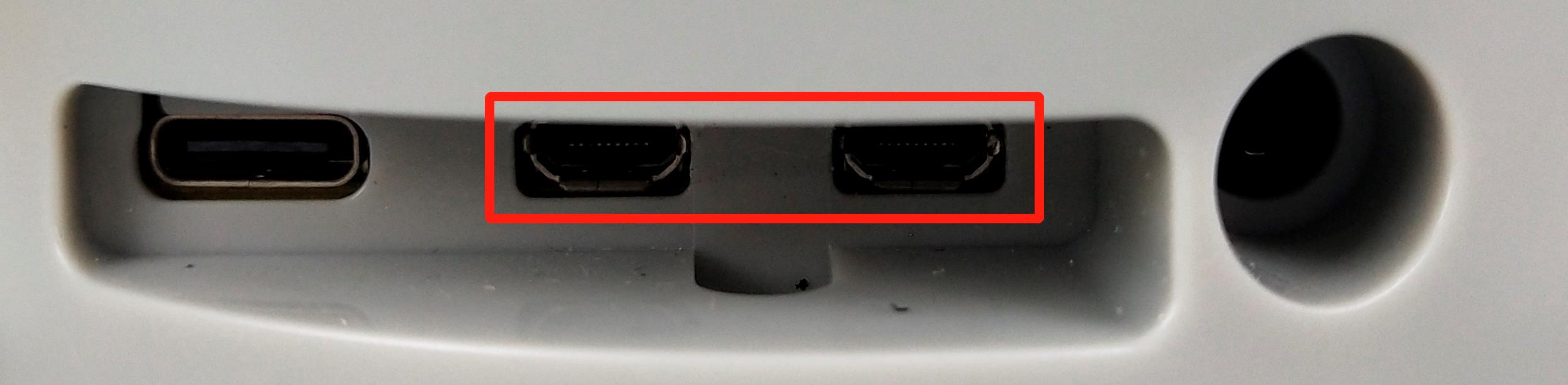
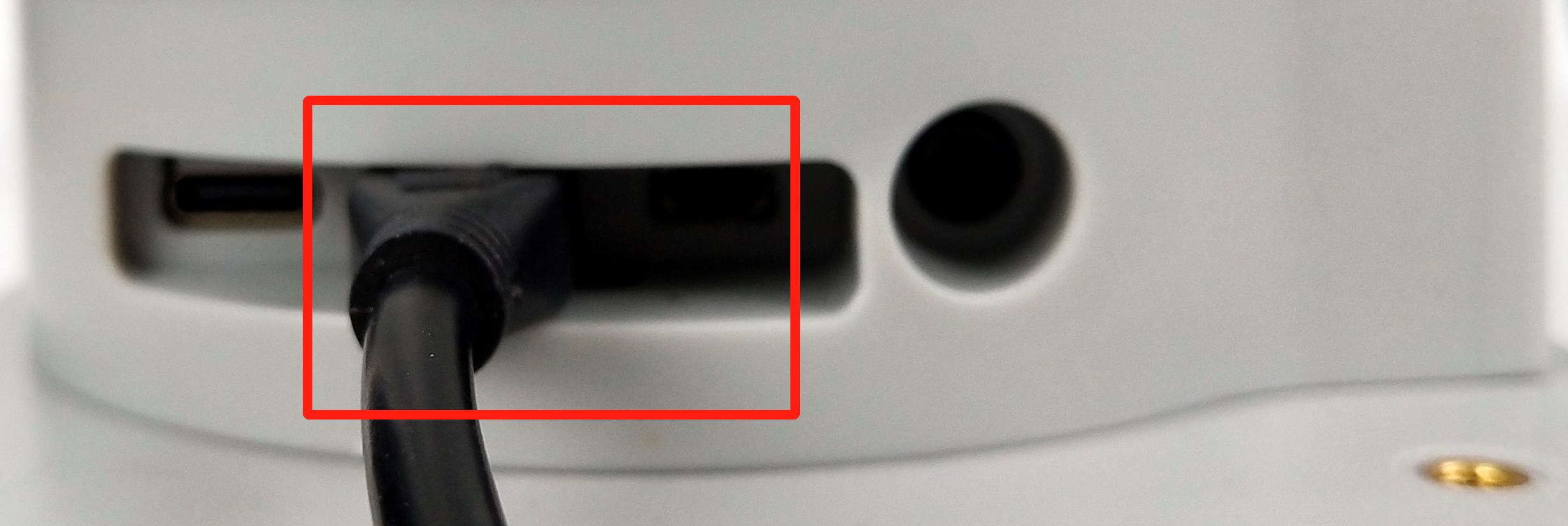
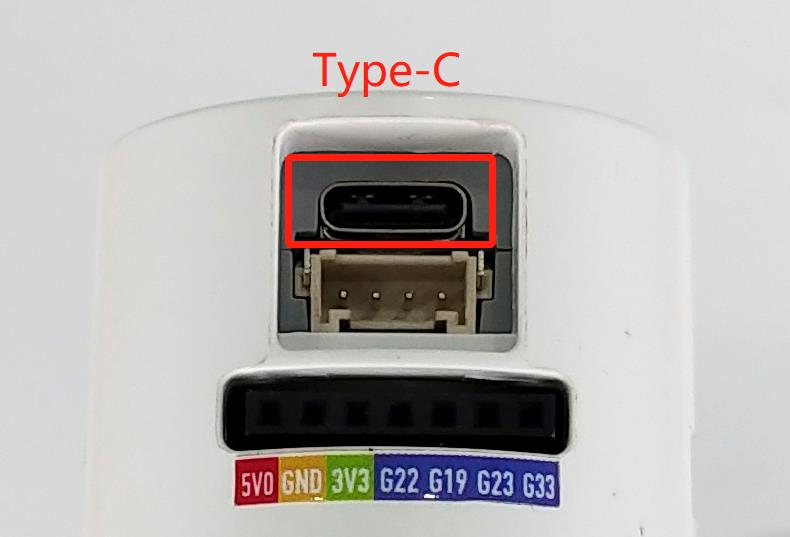
❗❗❗❗❗❗❗❗❗❗提示⚠:以下图中圈出的Type-C口,HDMI口,USB口全部无法用于与PC以及笔记本电脑通讯❗❗❗❗❗❗❗❗❗❗
❗❗❗❗❗❗❗❗❗❗提示⚠:以下图中圈出的Type-C口,HDMI口,USB口全部无法用于与PC以及笔记本电脑通讯❗❗❗❗❗❗❗❗❗❗
❗❗❗❗❗❗❗❗❗❗提示⚠:以下图中圈出的Type-C口,HDMI口,USB口全部无法用于与PC以及笔记本电脑通讯❗❗❗❗❗❗❗❗❗❗

- PI版本机器无需搭配PC、笔记本等设备,连接显示器即可进行应用开发
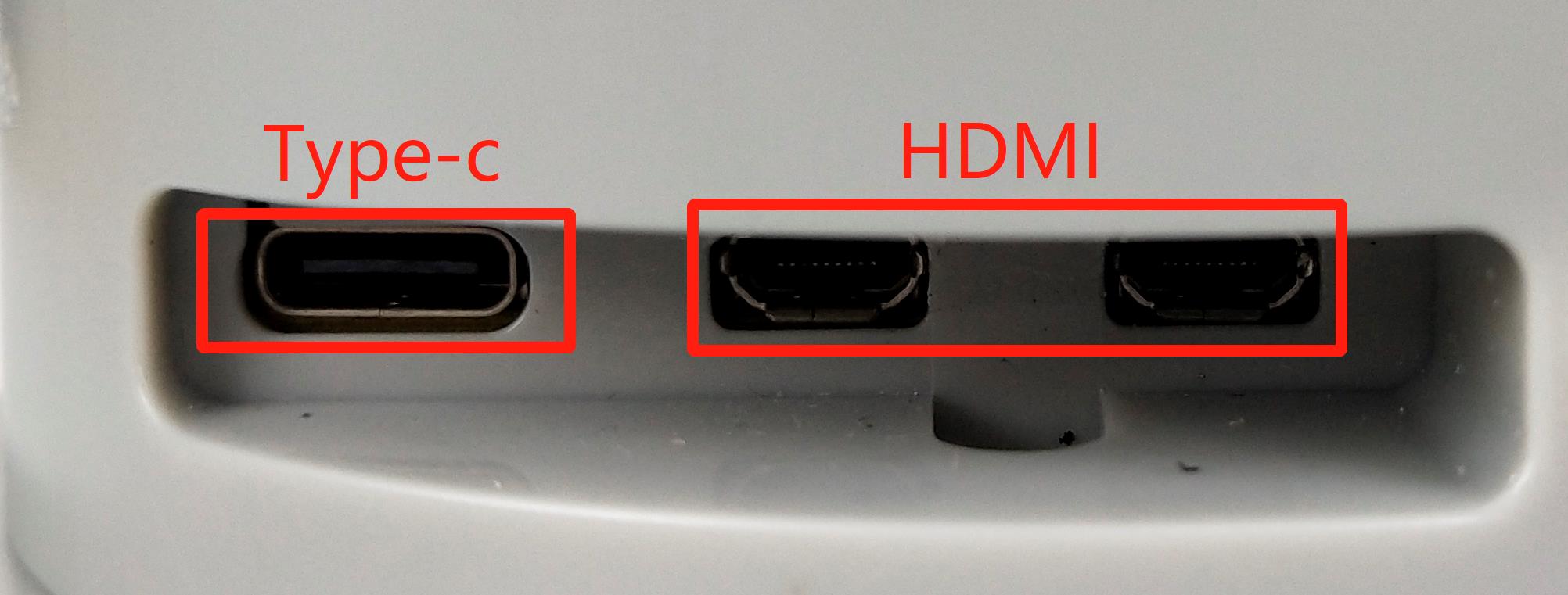
❗❗❗❗❗❗❗❗❗❗提示⚠:请使用配套发货的HDMI线连接显示器,使用内置系统进行开发❗❗❗❗❗❗❗❗❗❗
❗❗❗❗❗❗❗❗❗❗提示⚠:请使用配套发货的HDMI线连接显示器,使用内置系统进行开发❗❗❗❗❗❗❗❗❗❗
❗❗❗❗❗❗❗❗❗❗提示⚠:请使用配套发货的HDMI线连接显示器,使用内置系统进行开发❗❗❗❗❗❗❗❗❗❗
先将HDMI线插入显示器的HDMI接口

再将另一头插入机械臂的HDMI接口即可