3. 积木块API介绍
3.1 系统信息
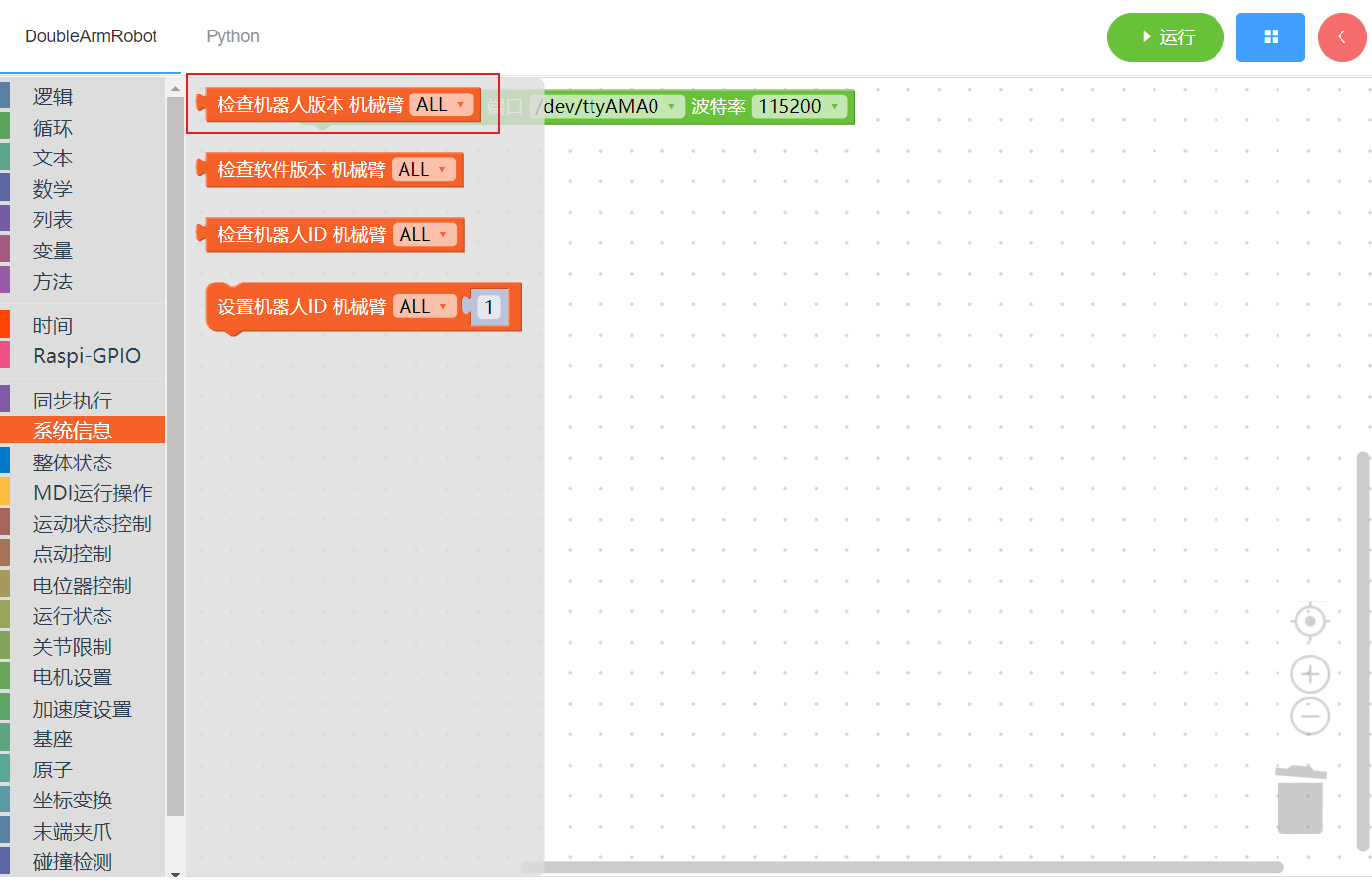
3.1.1 获取机器人版本
1. API说明
- 功能:获取机器人版本信息
- 参数:
ID(ALL/L/R/W):ALL 对应所有机械臂,L对应左臂,R对应右臂,W对应腰部
- 返回值 :机器人版本信息
2. 积木块展示
3.1.2 检查软件版本
1. API说明
- 功能:获取系统版本信息
- 参数:
ID(ALL/L/R/W):ALL 对应所有机械臂,L对应左臂,R对应右臂,W对应腰部
- 返回值 :版本信息
2. 积木块展示

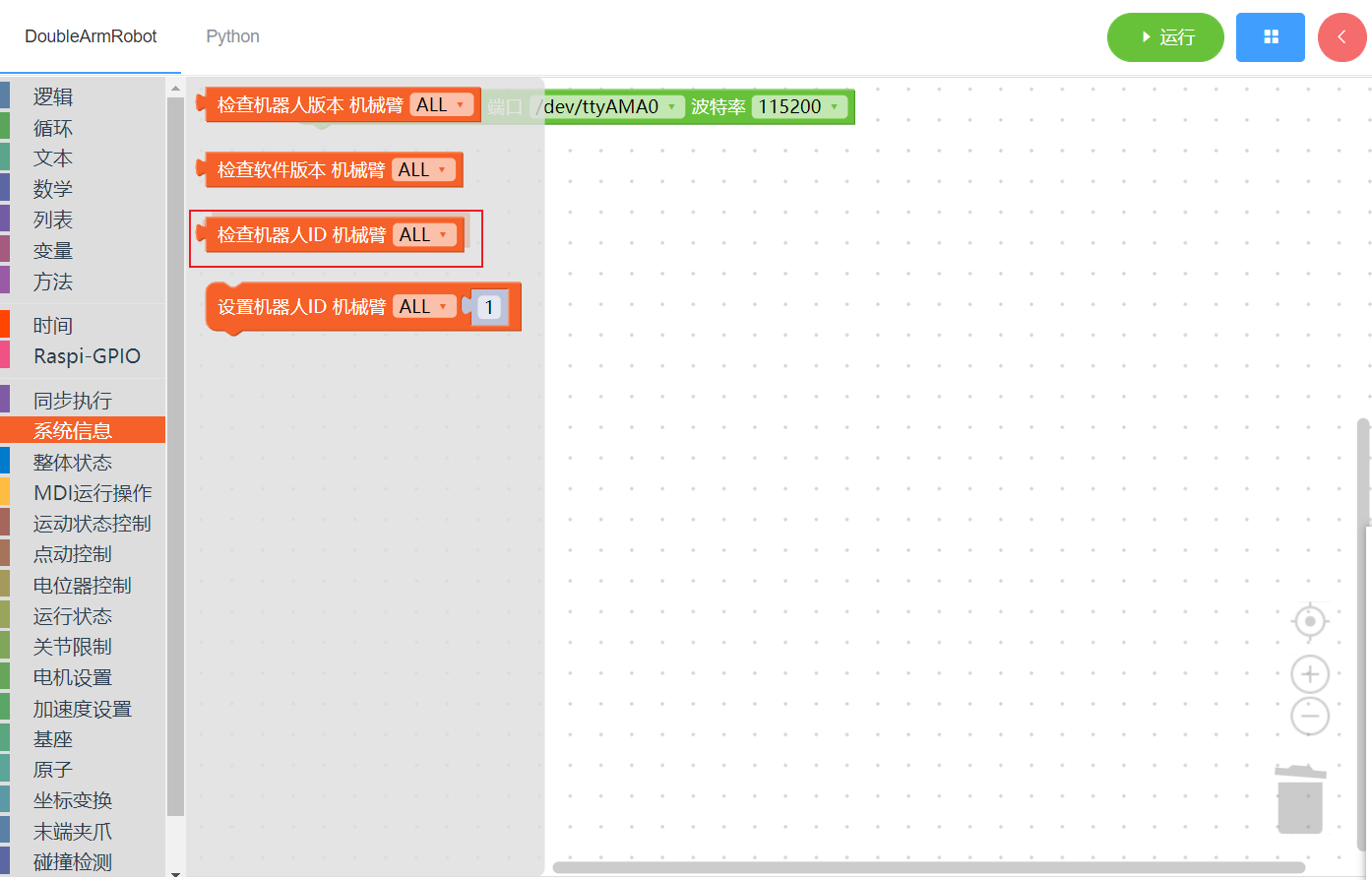
3.1.3 获取机器人ID
1. API说明
- 功能:获取机器人ID
- 参数:
ID(ALL/L/R/W):ALL 对应所有机械臂,L对应左臂,R对应右臂,W对应腰部
- 返回值 :ID
2. 积木块展示
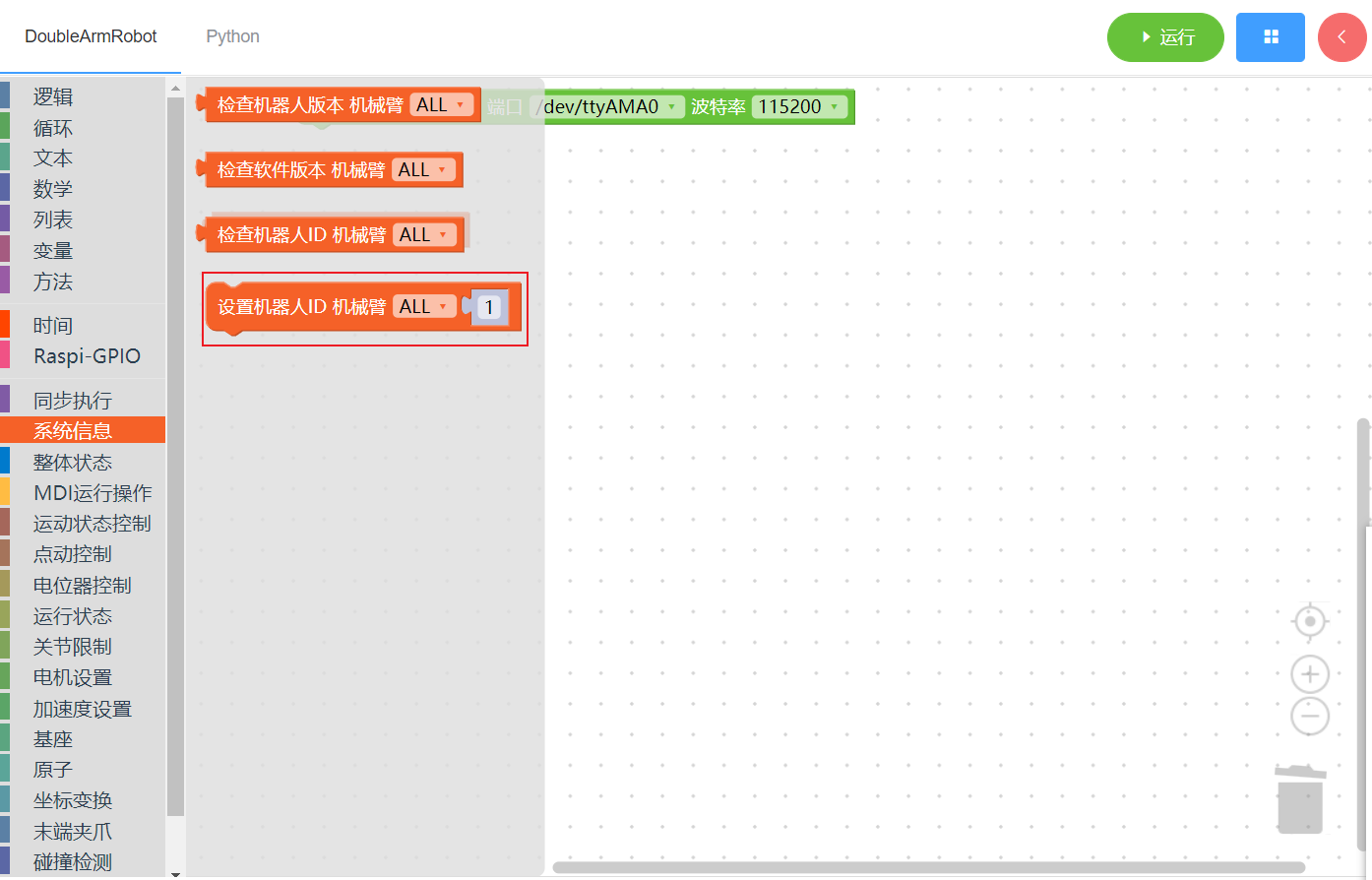
3.1.4 设置机械臂ID
1. API说明
- 功能:设置机器人ID
- 参数:
ID(ALL/L/R/W):ALL 对应所有机械臂,L对应左臂,R对应右臂,W对应腰部NUM:整数(1~253)
- 返回值 :无
2. 积木块展示
3.2 机械臂整体状态
3.2.1 打开电源
1. API说明
- 功能:机械臂打开电源
- 参数:
ID(ALL/L/R/W):ALL 对应所有机械臂,L对应左臂,R对应右臂,W对应腰部
- 返回值 :无
2. 积木块展示

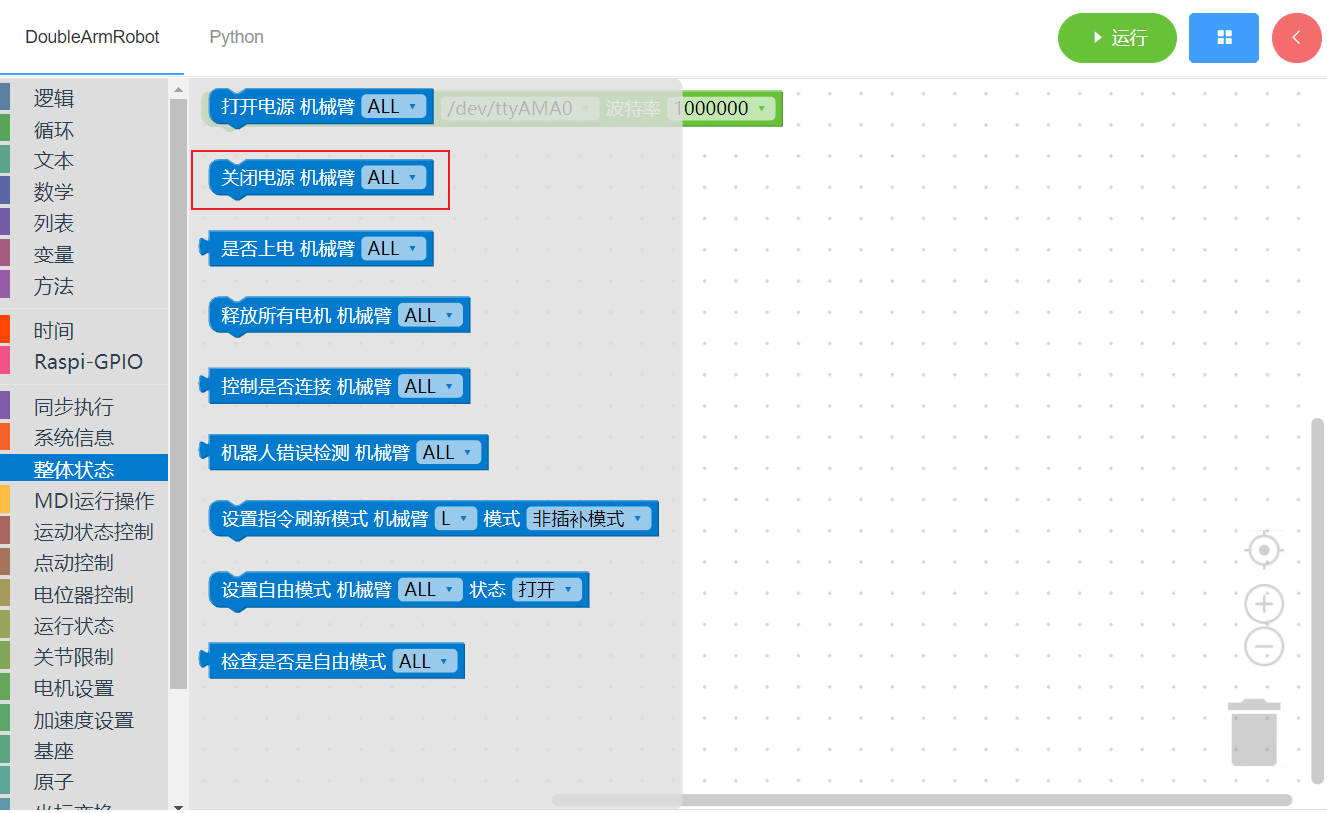
3.2.2 关闭电源
1. API说明
- 功能:机械臂关闭电源
- 参数:
ID(ALL/L/R/W):ALL 对应所有机械臂,L对应左臂,R对应右臂,W对应腰部
2. 积木块展示
3.2.3 检查机械臂是否上电
1. API说明
- 功能:检查机械臂是否上电
- 参数:
ID(ALL/L/R/W):ALL 对应所有机械臂,L对应左臂,R对应右臂,W对应腰部
- 返回值 :
- 1 上电
- 0 掉电
- -1 错误
2. 积木块展示

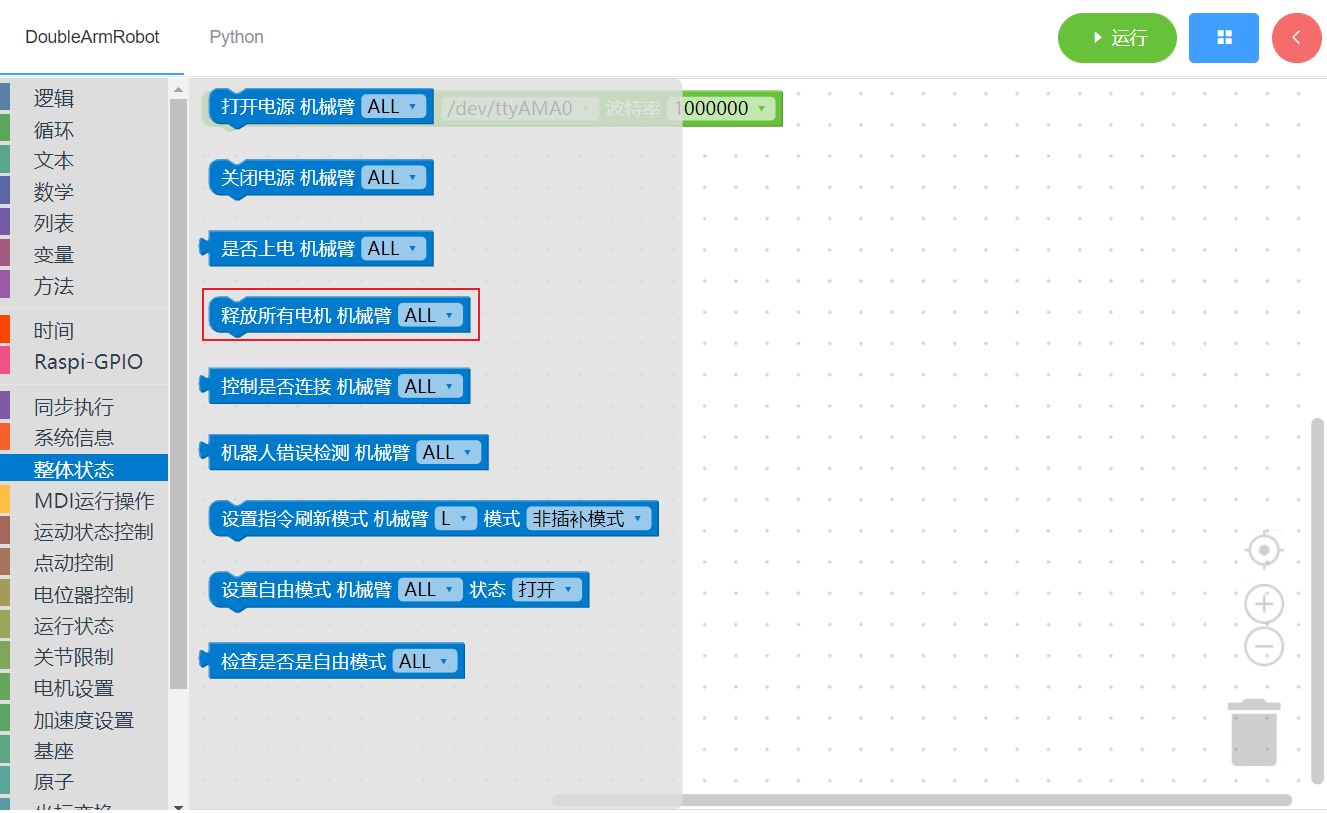
3.2.4 释放所有电机
1. API说明
- 功能:释放机械臂所有的电机
- 参数:
ID(ALL/L/R/W):ALL 对应所有机械臂,L对应左臂,R对应右臂,W对应腰部
- 返回值 :无
2. 积木块展示
3.2.5 控制是否连接
1. API说明
- 功能:查看机械臂控制是否连接
- 参数:
ID(ALL/L/R/W):ALL 对应所有机械臂,L对应左臂,R对应右臂,W对应腰部
- 返回值 :待定
2. 积木块展示

3.2.6 机器人错误检测
1. API说明
- 功能:机器人错误检测
- 参数:
ID(ALL/L/R/W):ALL 对应所有机械臂,L对应左臂,R对应右臂,W对应腰部
- 返回值 :无
2. 积木块展示

3.2.7 设置指令刷新模式
1. API说明
- 功能:设置机械臂指令刷新模式
- 参数:
ID(L/R):L对应左臂,R对应右臂MODE: 插补模式、非插补模式(默认)
- 返回值 :无
2. 积木块展示

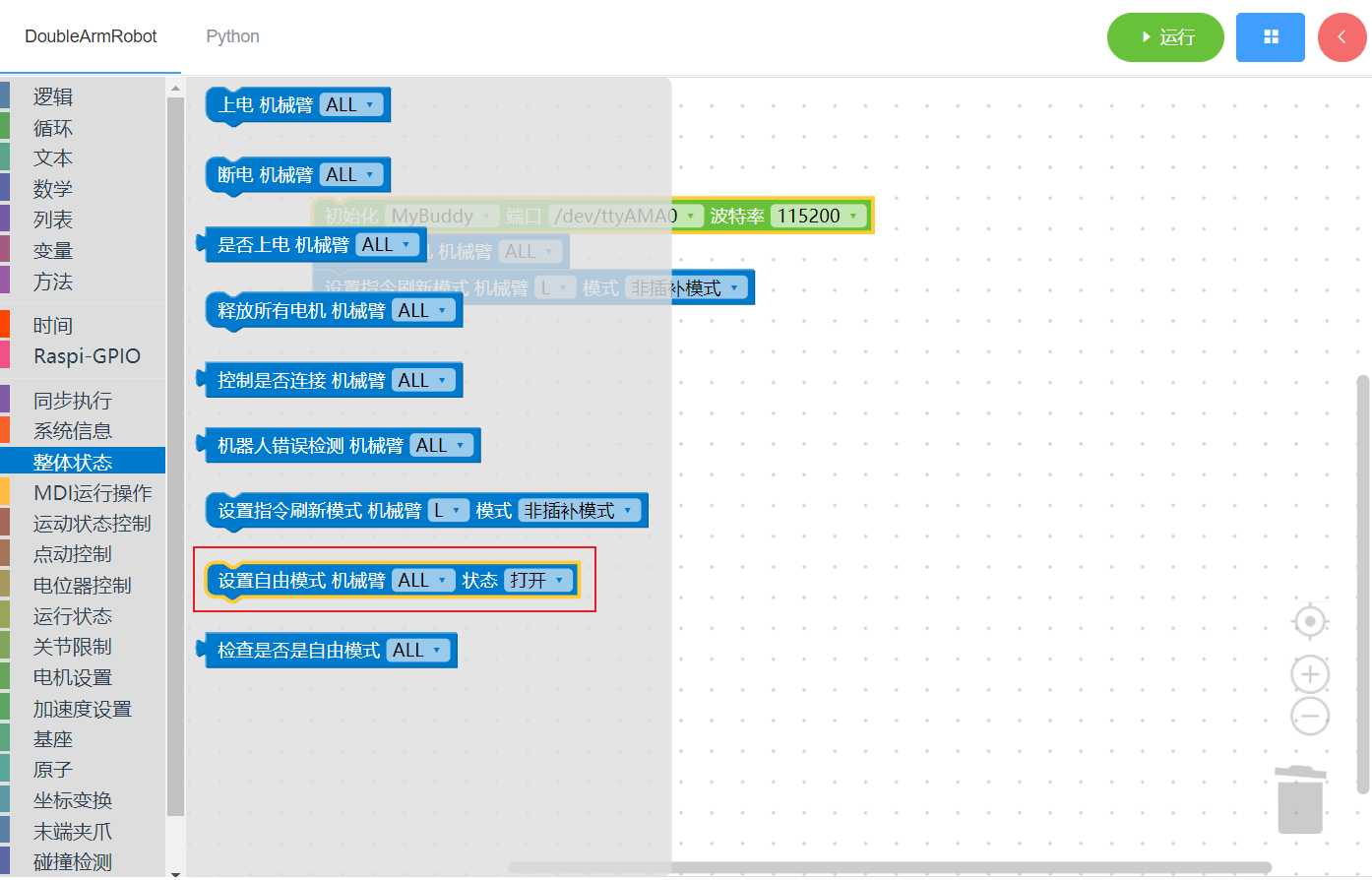
3.2.8 自由模式状态
1. API说明
- 功能:设置机械臂自由模式状态
- 参数:
ID(ALL/L/R/W):ALL 对应所有机械臂,L对应左臂,R对应右臂,W对应腰部STATUS:状态(打开/关闭)
- 返回值* :无
2. 积木块展示
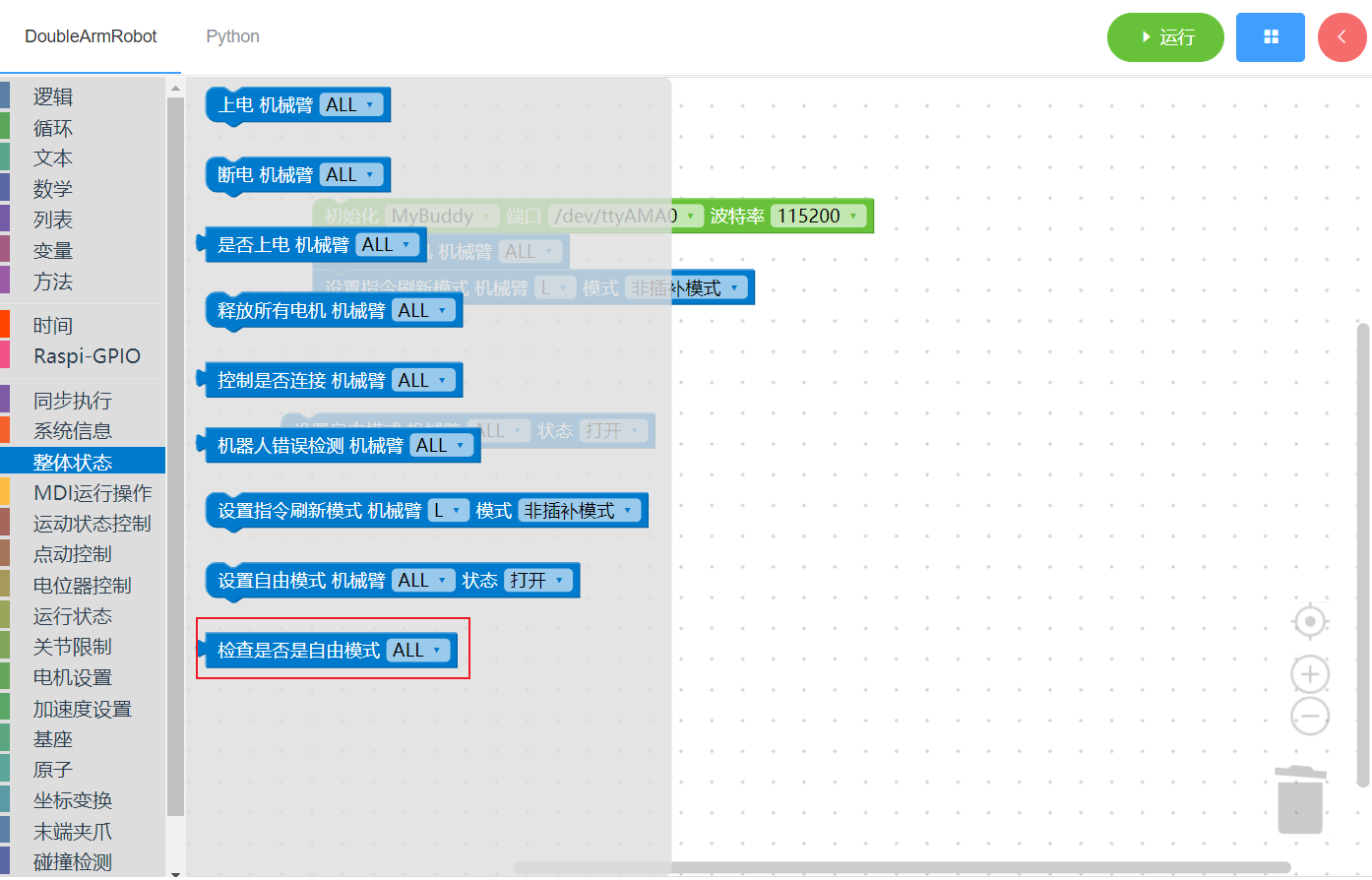
3.2.9 检查是否为自由模式
1. API说明
- 功能:检查机械臂是否为自由模式
- 参数:
ID(ALL/L/R/W):ALL 对应所有机械臂,L对应左臂,R对应右臂,W对应腰部
- 返回值 :
- 0 否
- 1 是
2. 积木块展示
3.3 MDI运行操作
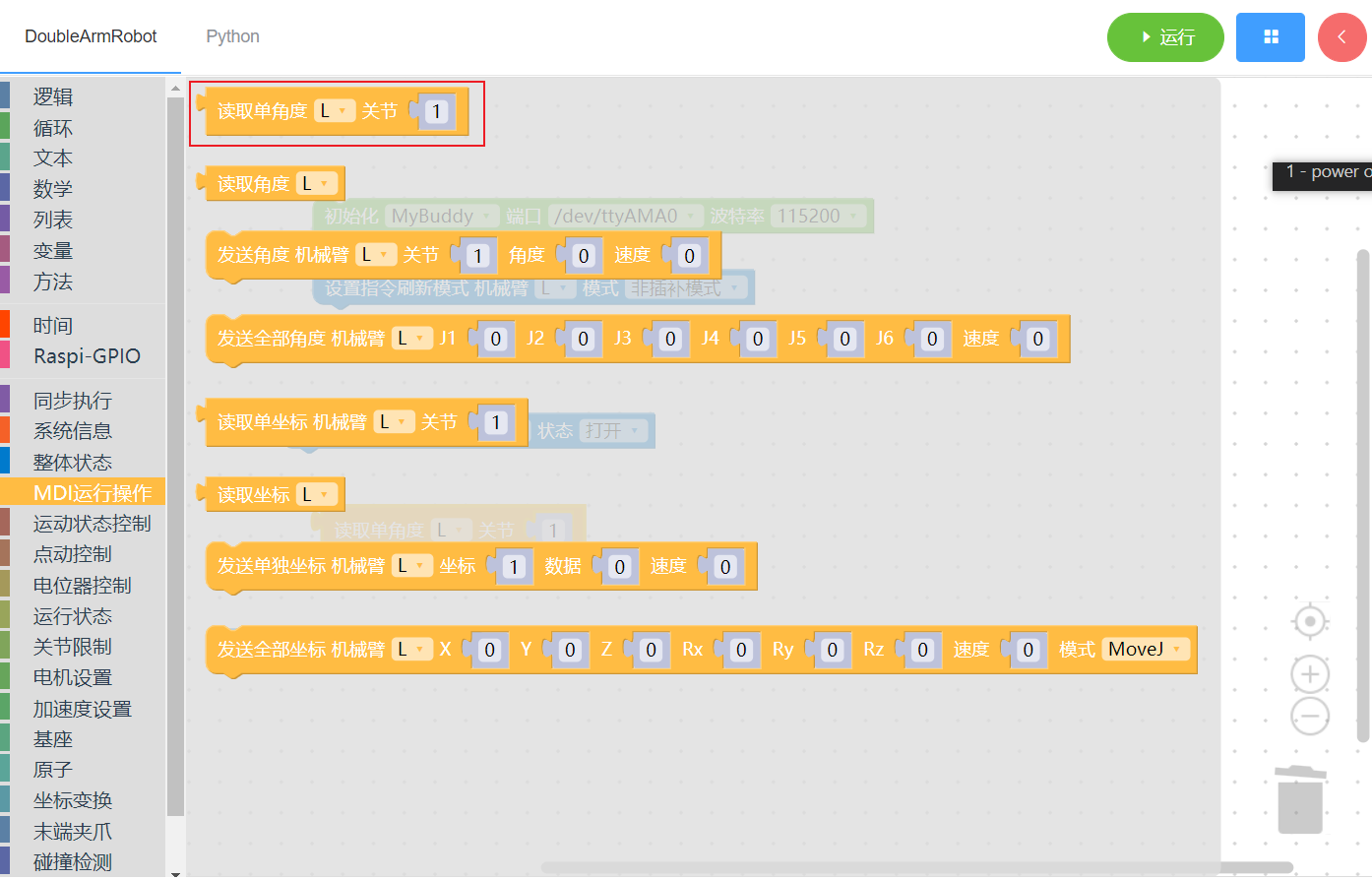
3.3.1 读取单角度
1. API说明
- 功能:读取机械臂的单个关节角度
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部JOINT:关节id(1~6)
- 返回值 :单个关节角度
2. 积木块展示
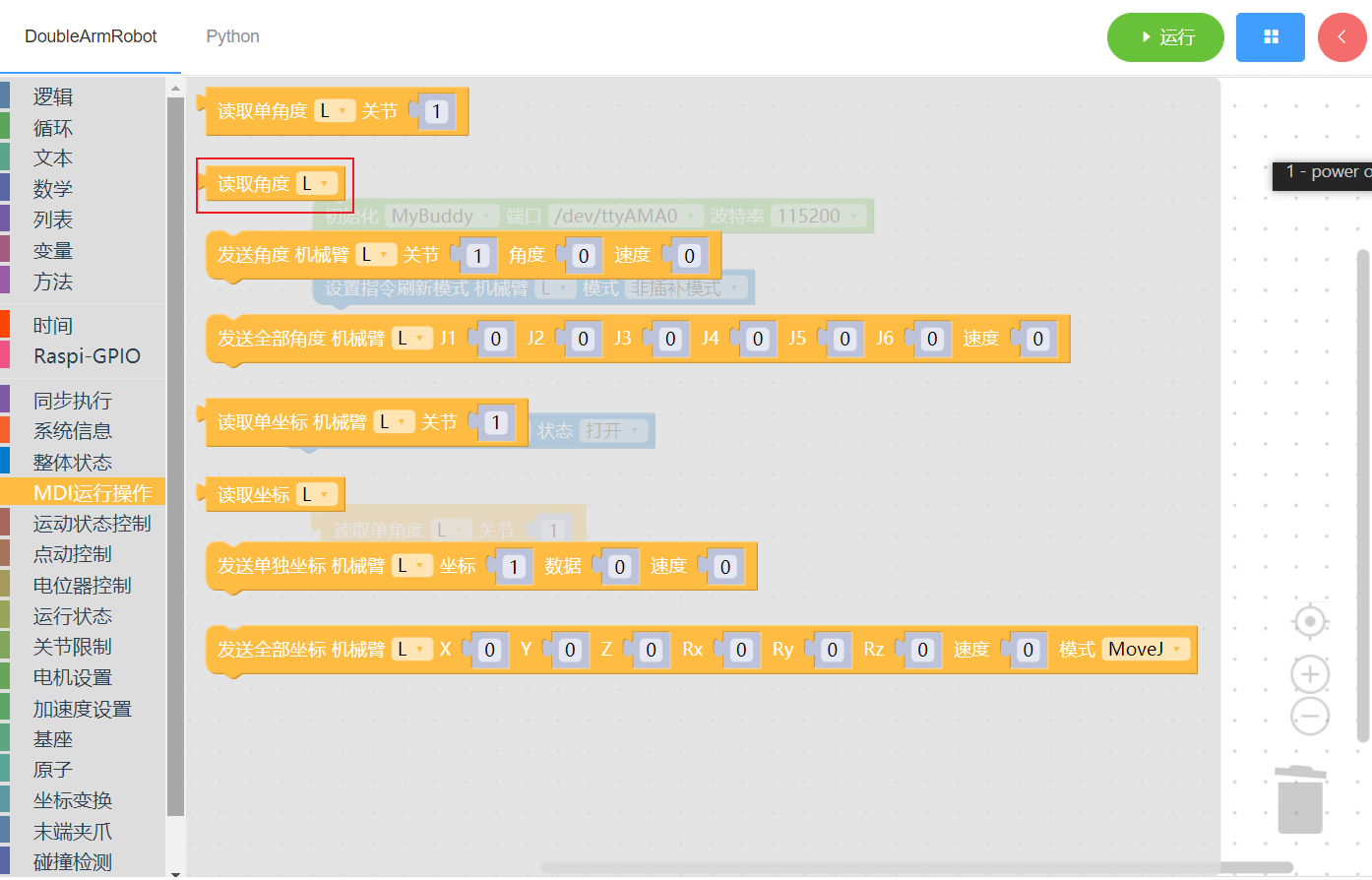
3.3.2 读取全角度
1. API说明
- 功能:读取机械臂全部角度
- 参数:
ID(L/R):L对应左臂,R对应右臂
- 返回值 :
ANGLES:机械臂对应的关节角度列表(包含关节一至关节六的角度)
2. 积木块展示
3.3.3 发送单角度
1. API说明
- 功能:设置机械臂单角度
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部JOINT_ID:关节1~6ANGLE:角度SPEED:机械臂移动的速度(0~100)
- 返回值 :无
2. 积木块展示

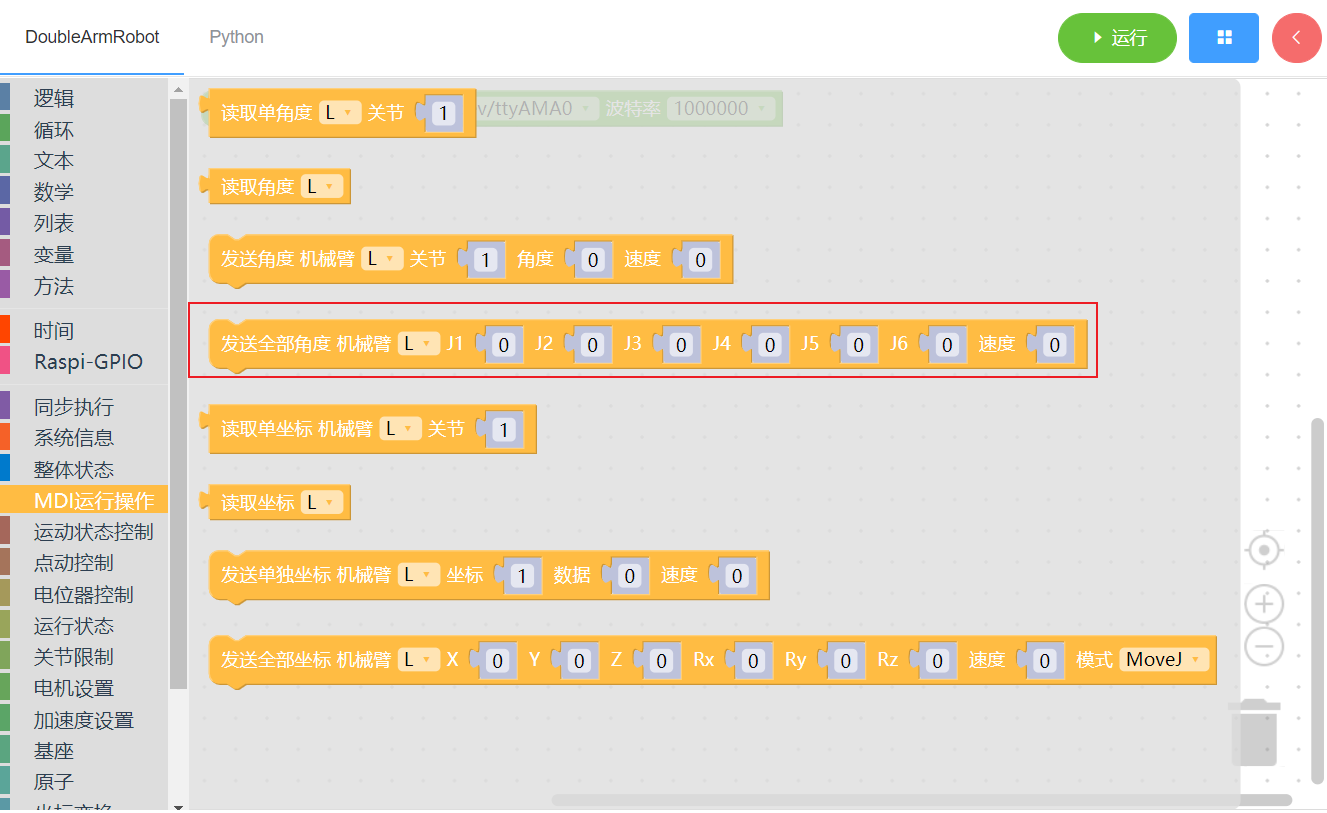
3.3.4 发送全部角度
1. API说明
- 功能:设置机械臂全部角度
- 参数:
ID(L/R):L对应左臂,R对应右臂ANGLES:关节一至关节六的角度SPEED:机械臂移动的速度(0~100)
- 返回值 :无
2. 积木块展示
3.3.5 读单坐标
1. API说明
- 功能:读取机械臂单个关节坐标
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部COORD:1~6(x/y/z/rx/ry/rz)SPEED:机械臂移动的速度(0~100)
- 返回值 :单个关节坐标
2. 积木块展示
3.3.6 读取全部坐标
1. API说明
- 功能:读取机械臂全部坐标
- 参数:
ID(L/R):L对应左臂,R对应右臂
- 返回值 :
COORDS:机械臂全部关节坐标
2. 积木块展示
3.3.7 发送单坐标
1. API说明
- 功能:设置机械臂单个坐标
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部COORD:坐标id,范围1~6(x/y/z/rx/ry/rz)DATA:坐标数据SPEED:机械臂移动的速度(0~100)
- 返回值 :无
2. 积木块展示
3.3.8 发送全部坐标
1. API说明
- 功能:设置机械臂全部坐标
- 参数:
ID(L/R):L对应左臂,R对应右臂COORDS:关节一至关节六的坐标SPEED:机械臂移动的速度(0~100)MODE: 0 - moveJ, 1 - moveL, 2 - moveC
- 返回值 :无
2. 积木块展示
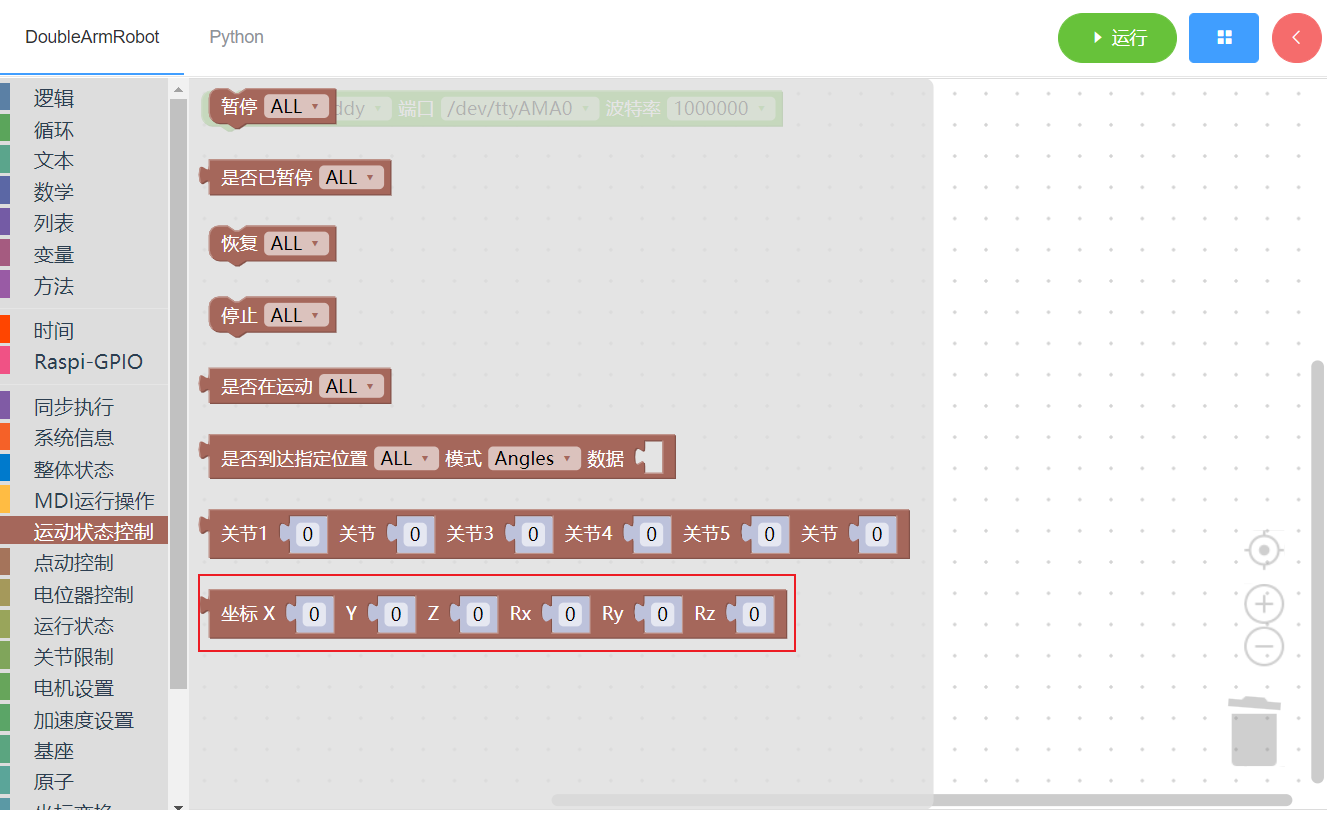
3.4 运动状态控制
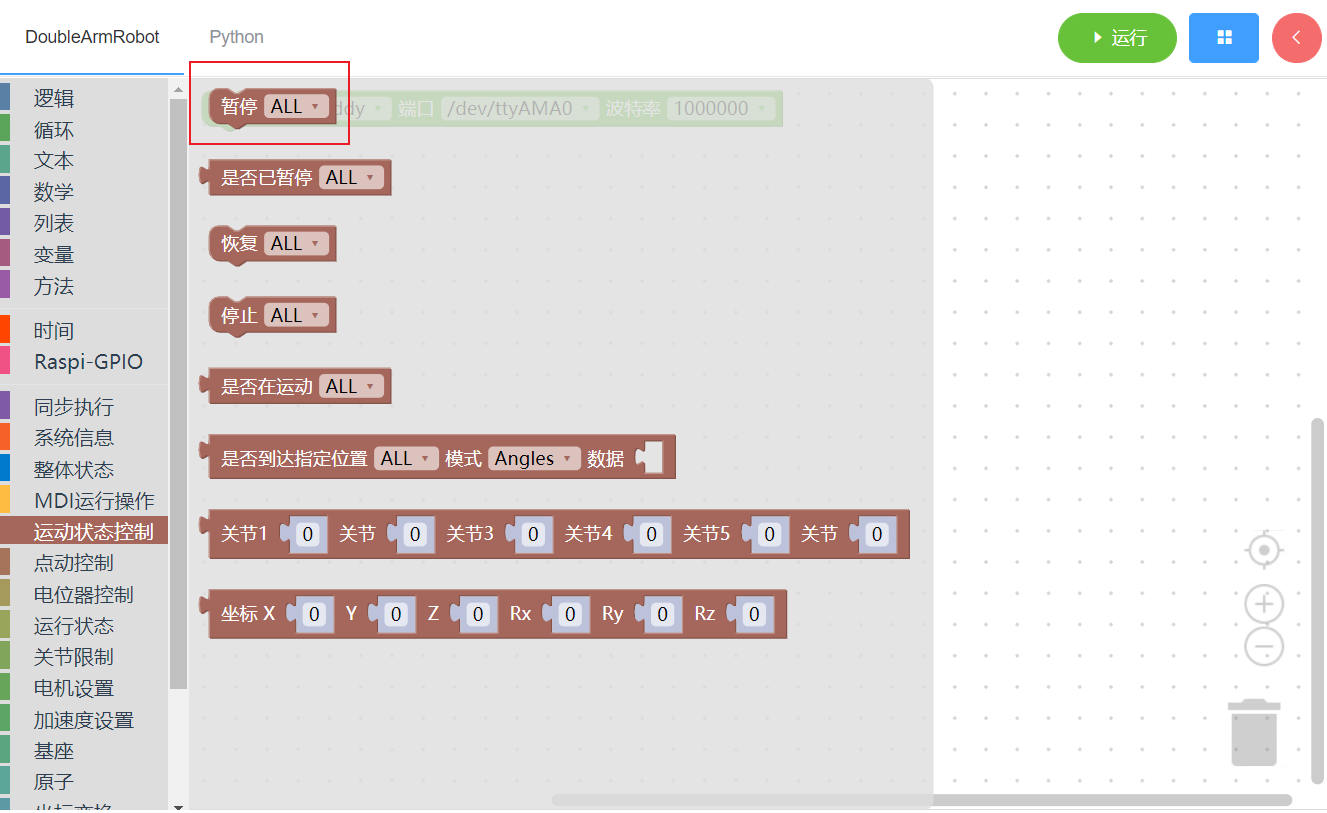
3.4.1 暂停
1. API说明
- 功能:暂停机械臂移动
- 参数:
ID(ALL/L/R/W):ALL对应全部机械臂,L对应左臂,R对应右臂,W对应腰部
- 返回值 :无
2. 积木块展示
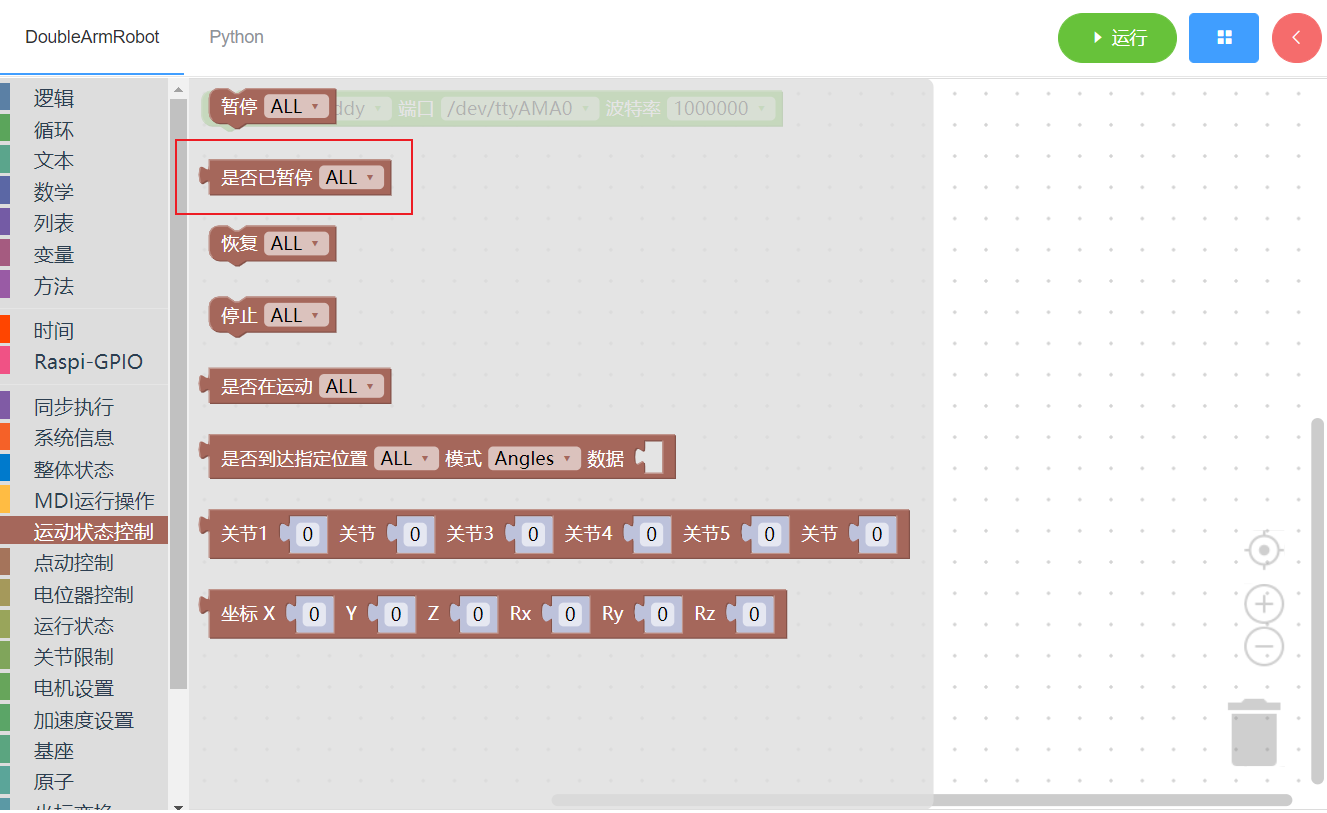
3.4.2 是否已暂停
1. API说明
- 功能:检查机械臂是否暂停
- 参数:
ID(ALL/L/R/W):ALL对应全部机械臂,L对应左臂,R对应右臂,W对应腰部
- 返回值 :
- 1 已暂停
- 0 未暂停
- -1 错误
2. 积木块展示
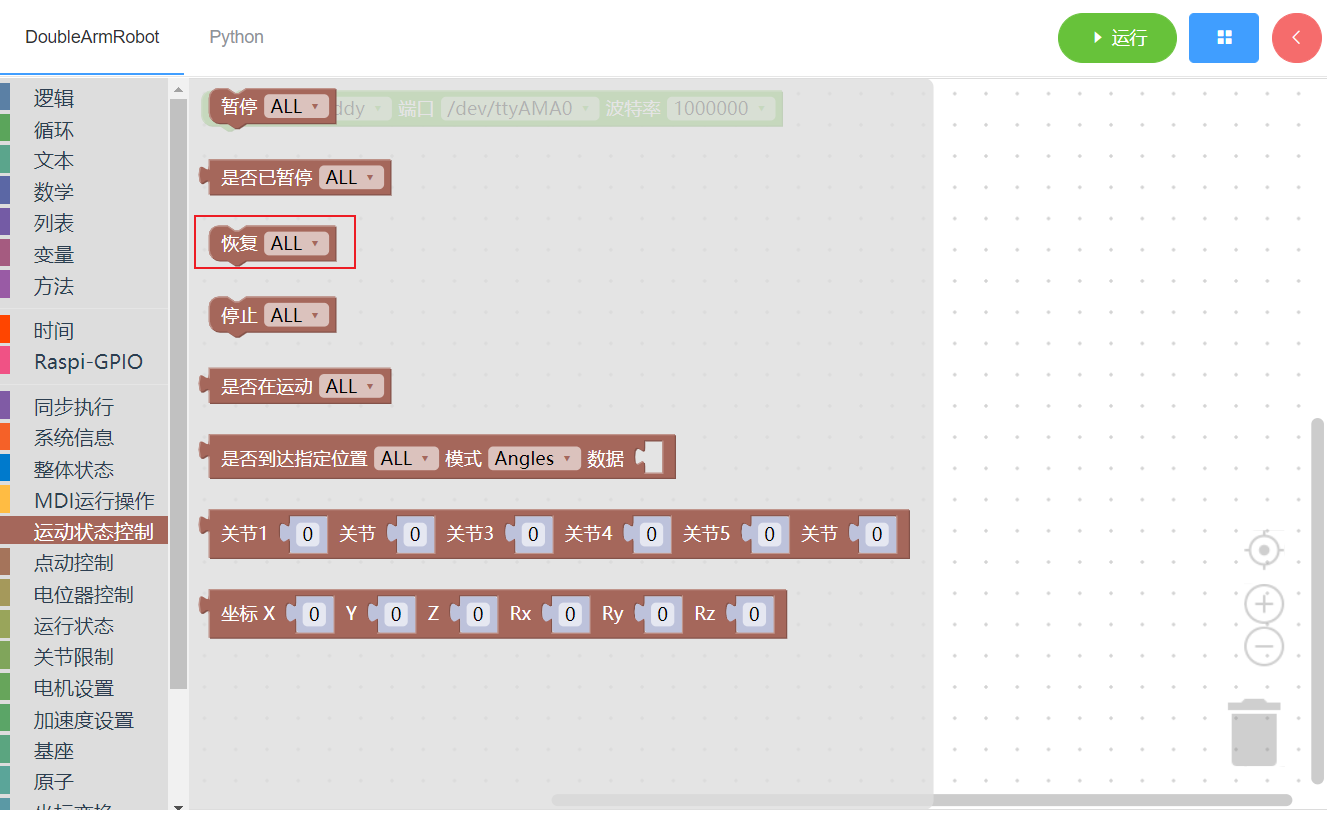
3.4.3 恢复
1. API说明
- 功能:恢复机械臂运动
- 参数:
ID(ALL/L/R/W):ALL对应全部机械臂,L对应左臂,R对应右臂,W对应腰部
- 返回值 :无
2. 积木块展示
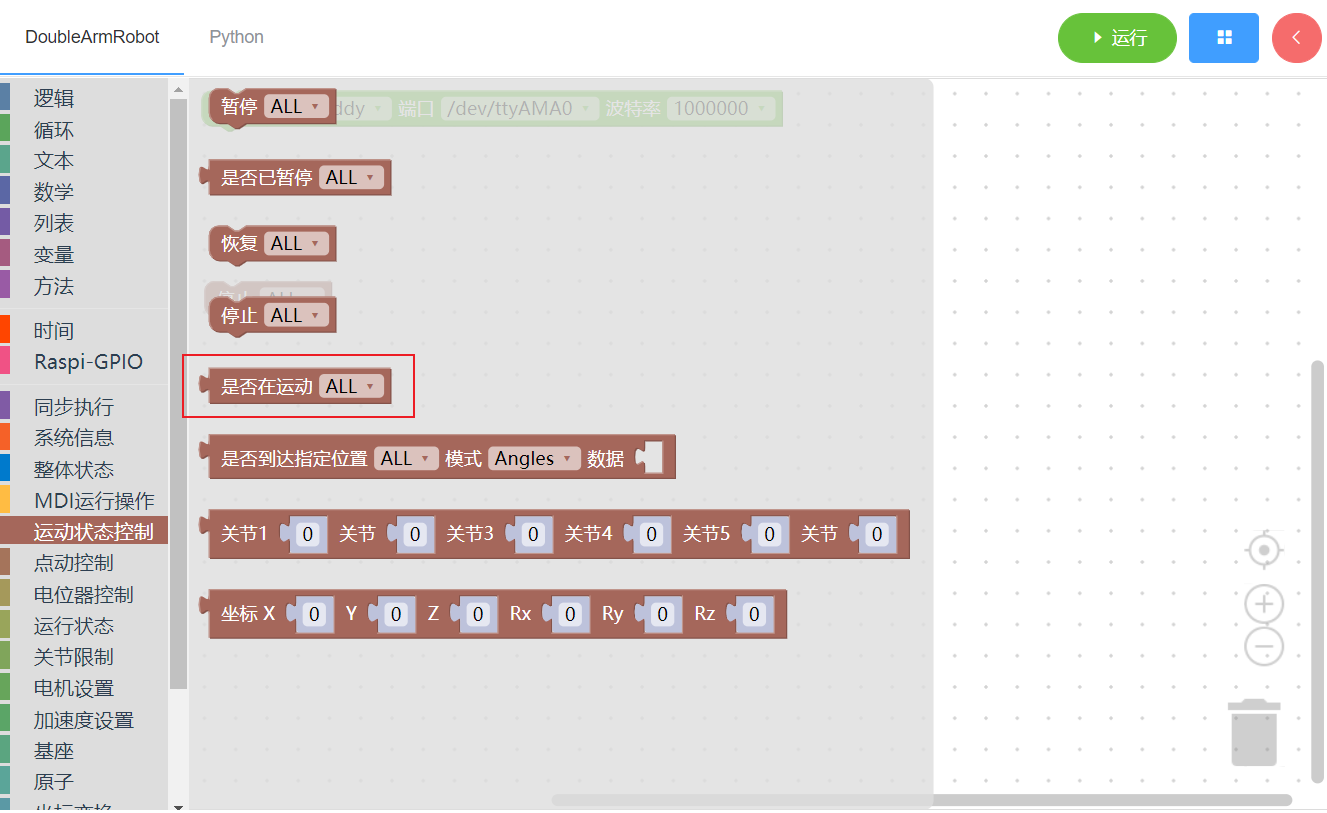
3.4.5 是否在运动
1. API说明
- 功能:检查机械臂是否在运动
- 参数:
ID(ALL/L/R/W):ALL对应全部机械臂,L对应左臂,R对应右臂,W对应腰部
- 返回值 :
- 1 正在运动
- 0 未运动
- -1 错误
2. 积木块展示
3.4.6 是否到达指定位置
1. API说明
- 功能:检查机械臂是否到达指定位置
- 参数:
ID(ALL/L/R/W):ALL对应全部机械臂,L对应左臂,R对应右臂,W对应腰部DATA:数据列表,当ID为ALL时填入13个数据,当ID为L/R时填入6个数据,当ID为W时填入1个数据MODE:模式 (Angles:角度 / Coords:坐标)
- 返回值 :
- 1 是
- 0 否
- -1 错误
2. 积木块展示

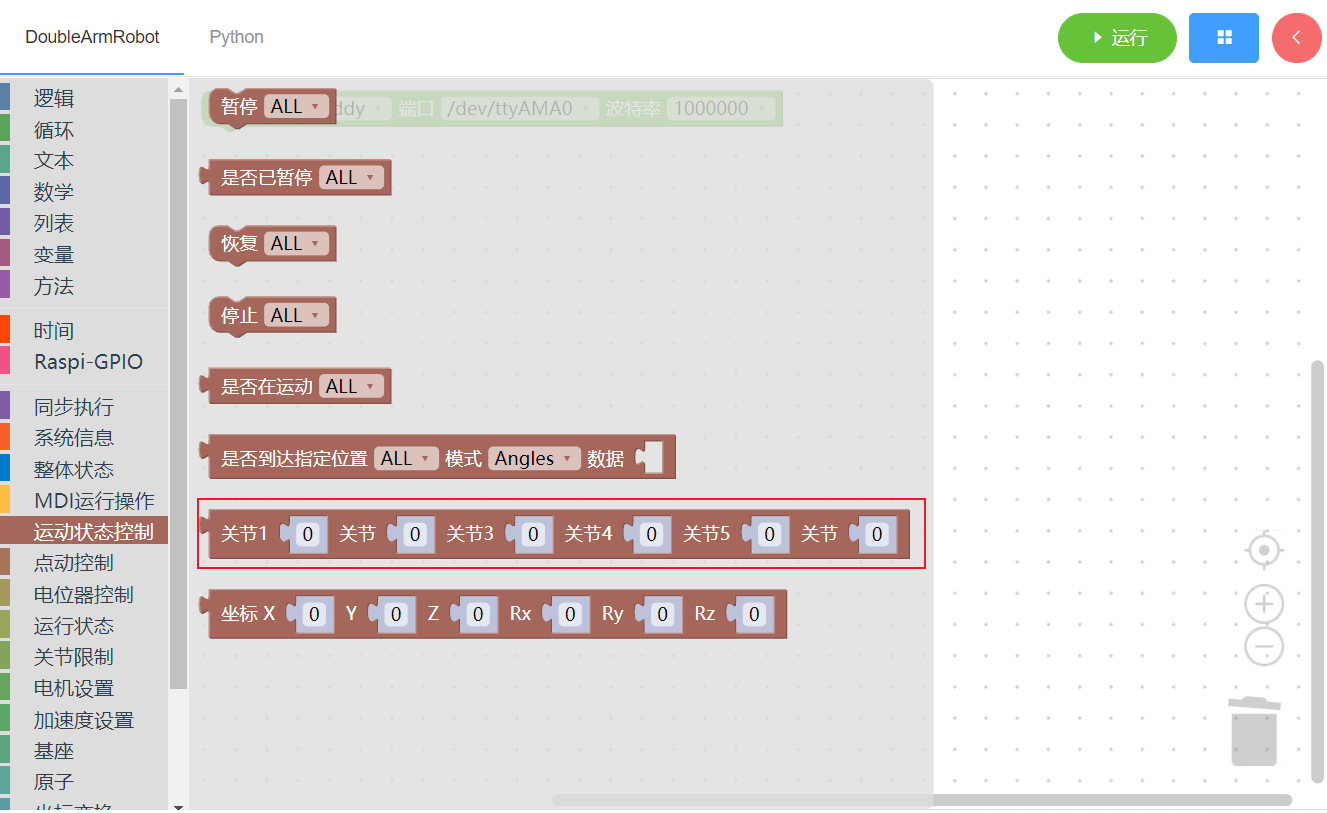
3.4.7 角度列表
1. API说明
功能:为 3.4.6 是否到达指定位置 单独设置的列表,可以填入6个角度
参数:
DATA:数据列表,填入6个角度
返回值 :
ANGLES:角度列表(长度为6)
2.积木块展示
3.4.8 坐标列表
1. API说明
功能:为 3.4.6 是否到达指定位置 单独设置的列表,可以填入6个坐标
参数:
DATA:数据列表,填入6个坐标
返回值 :
COORDS:坐标列表(长度为6)
2.积木块展示
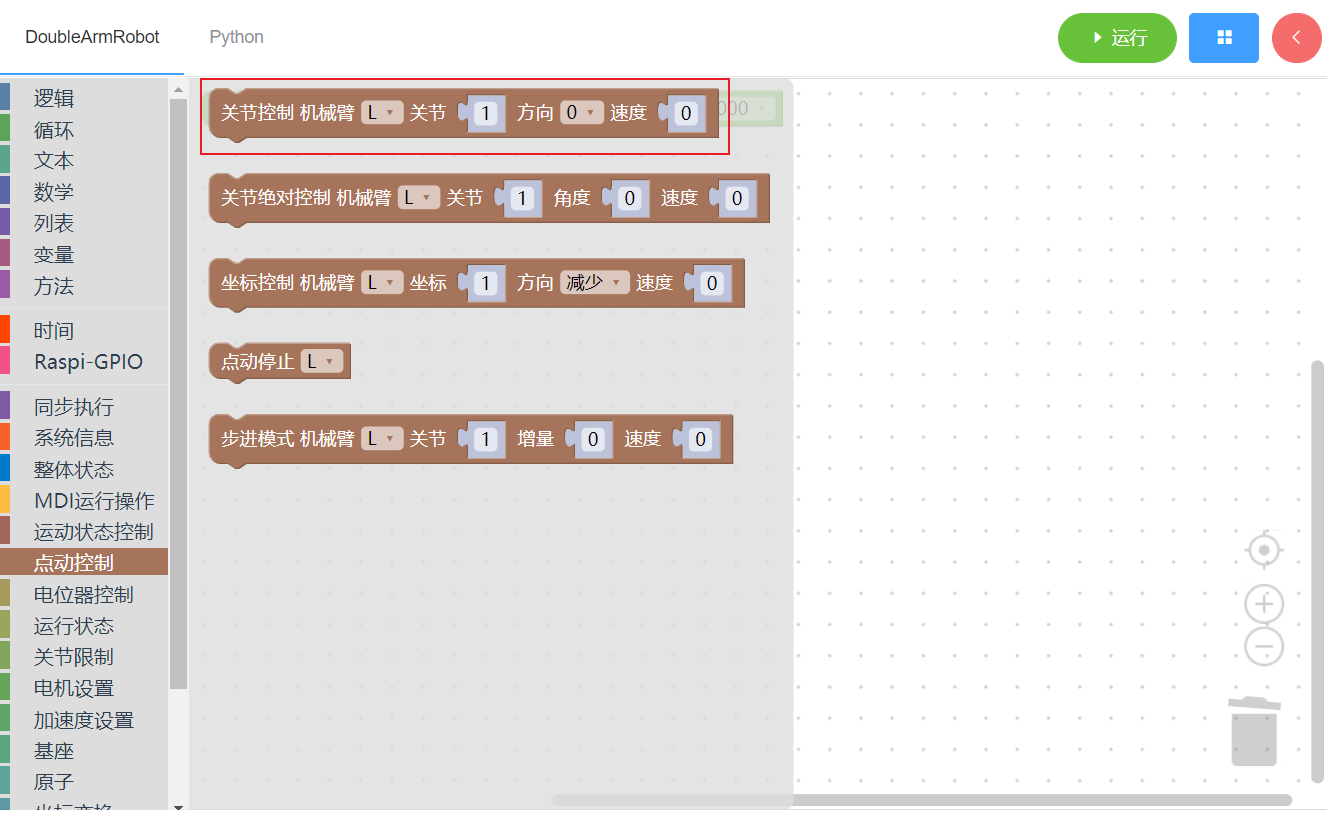
3.5 点动控制
3.5.1 关节控制
1. API说明
- 功能:关节控制
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部JOINT:关节id,1~6DIRECTION:0-减少 1-增加SPEED:速度(0~100)
返回值 :无
2.积木块展示
3.5.2 关节绝对控制
1. API说明
- 功能:关节绝对控制
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部JOINT:关节id,1~6AGNLE:角度SPEED:速度(0~100)
返回值 :无
2.积木块展示

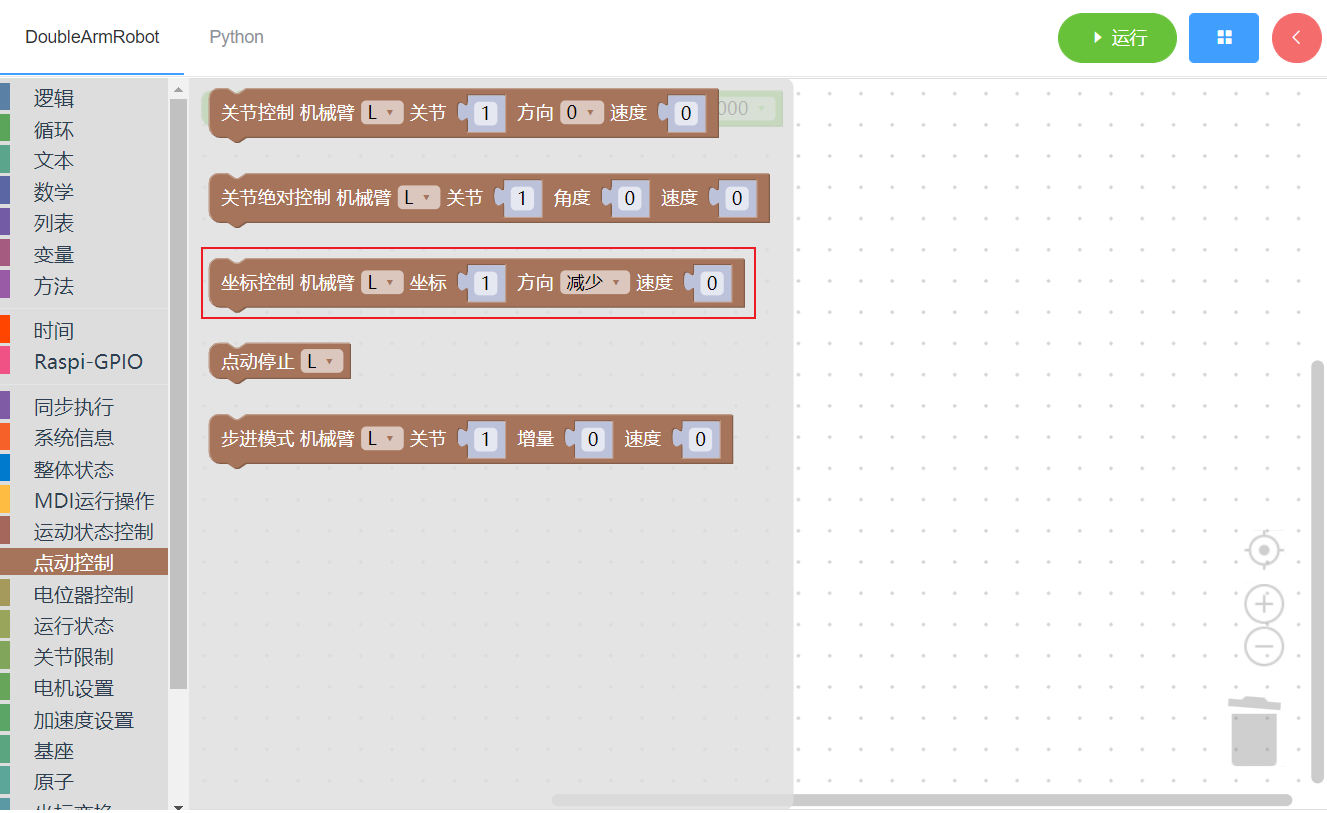
3.5.3 坐标控制
1. API说明
- 功能:坐标控制
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部COORD:坐标1~6(x/y/z/rx/ry/rz)DIRECTION:0-减少 1-增加SPEED:速度 (0~100)
返回值 :无
2.积木块展示
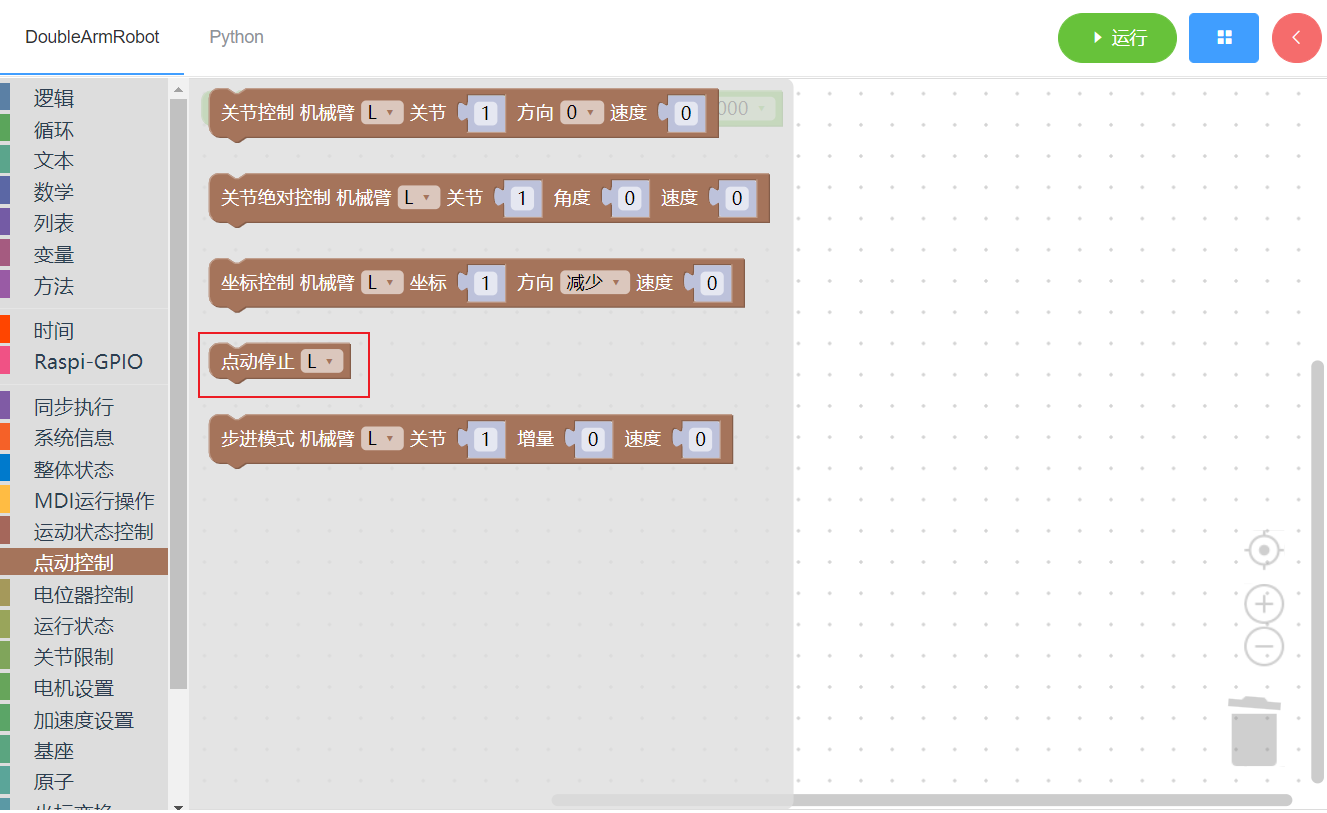
3.5.4 点动停止
1. API说明
- 功能:点动停止
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部
返回值 :无
2.积木块展示
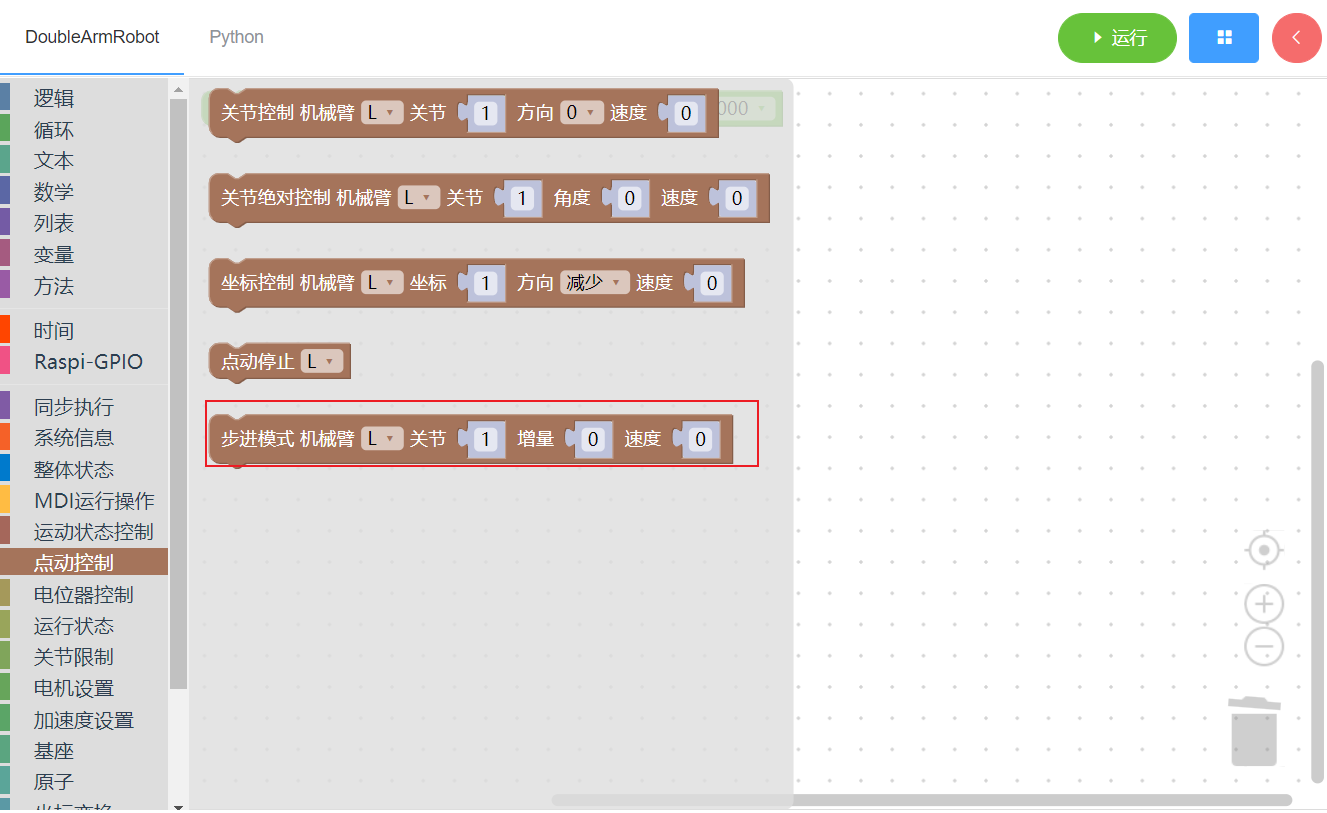
3.5.5 设置步进模式
1. API说明
- 功能:设置步进模式
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部JOINT:关节id(1~6)INCREMENT:增量 (整数)SPEED:速度 (0~100)
返回值 :无
2.积木块展示
3.6 电位器控制
3.6.1 设置电位器
1. API说明
- 功能:设置机械臂电位器编码
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部JOINT:关节1~6ENCODER:编码值(整数)
返回值 :无
2.积木块展示

3.6.2 获取电位器编码
1. API说明
- 功能:获取机械臂电位器编码
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部JOINT:关节1~6
返回值 :
ENCODER:编码值(0 ~ 4096)
2.积木块展示

3.6.3 获取所有电位器编码
1. API说明
- 功能:获取机械臂所有电位器编码
- 参数:
ID(L/R):L对应左臂,R对应右臂
返回值 :
ENCODERS:编码值列表
2.积木块展示

3.6.4 设置所有电位器编码值
1. API说明
- 功能:获取机械臂所有电位器编码
- 参数:
ID(L/R):L对应左臂,R对应右臂ENCODERS:编码值列表(6个整数)SPEED:速度(0~100)
返回值 :无
2.积木块展示

3.7.1 运行状态
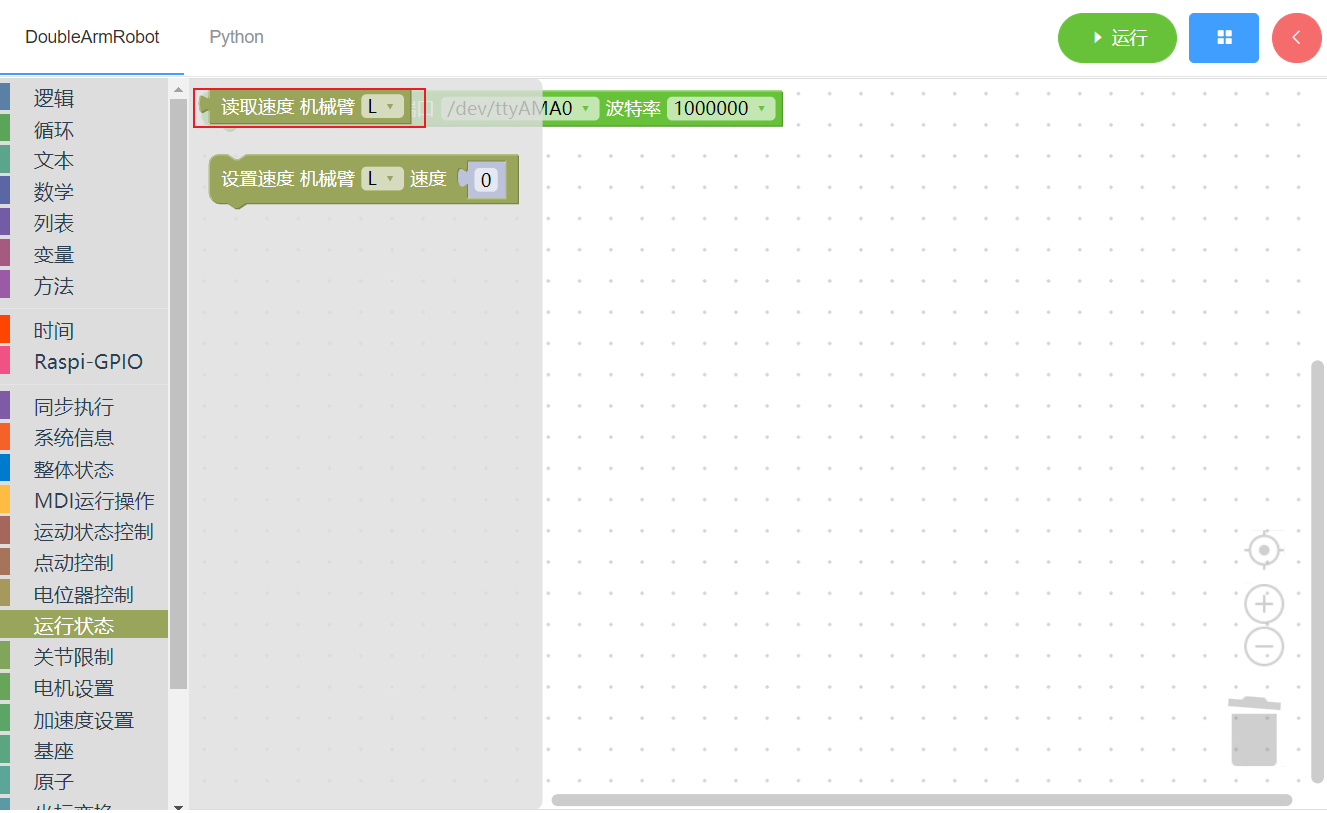
3.7.1 读取速度
1. API说明
- 功能:获取机械臂速度
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部
返回值 :
SPEED:速度(0~100)
2.积木块展示
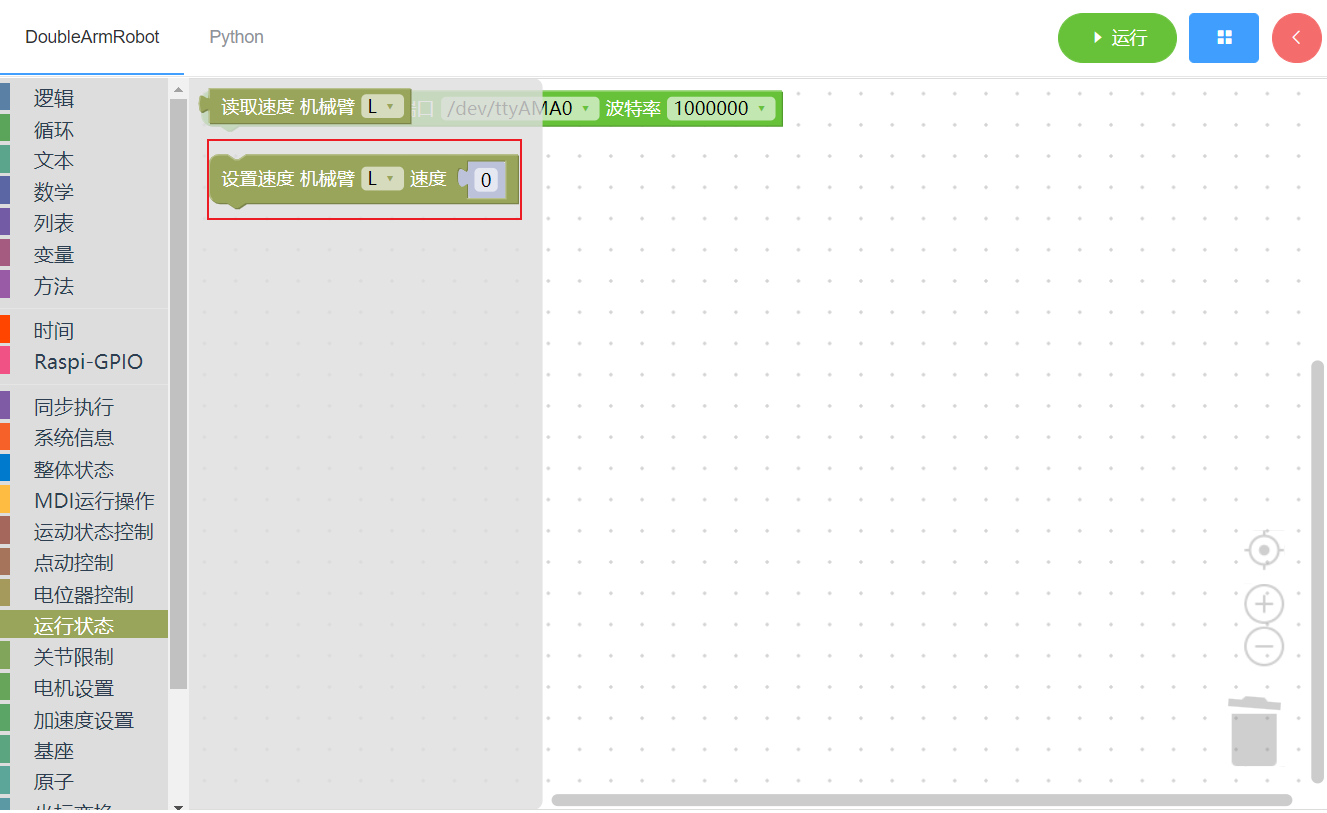
3.7.2 设置速度
1. API说明
- 功能:设置机械臂速度
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部SPEED:速度(0~100)
返回值 :无
2.积木块展示
3.8 关节限制
3.8.1 读取关节最小角度
1. API说明
- 功能:读取机械臂关节最小角度
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部JOINT:关节id(1~6)
返回值 :
ANGLE:角度
2.积木块展示

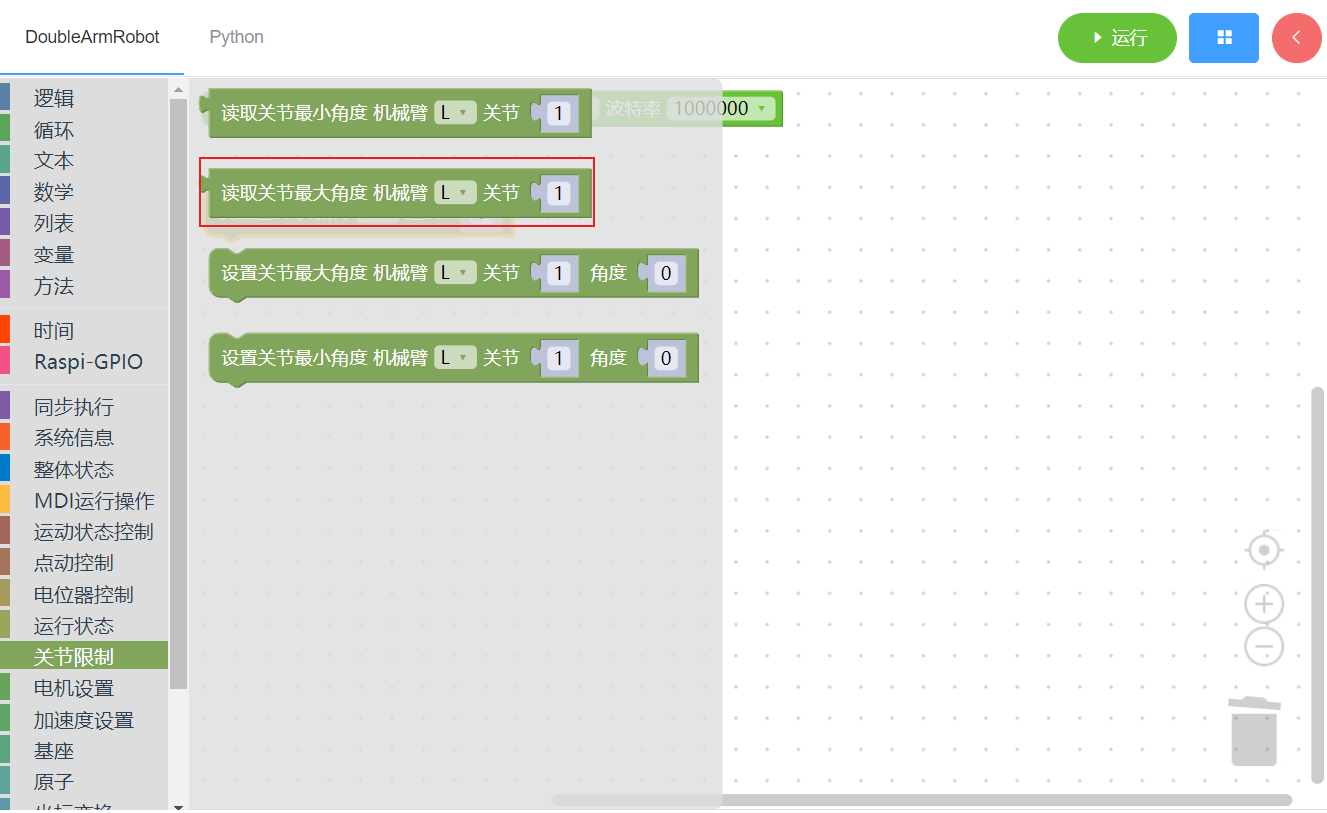
3.8.2 读取关节最大角度
1. API说明
- 功能:读取机械臂关节最大角度
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部JOINT:关节id(1~6)
- 返回值 :
ANGLE:角度
2.积木块展示
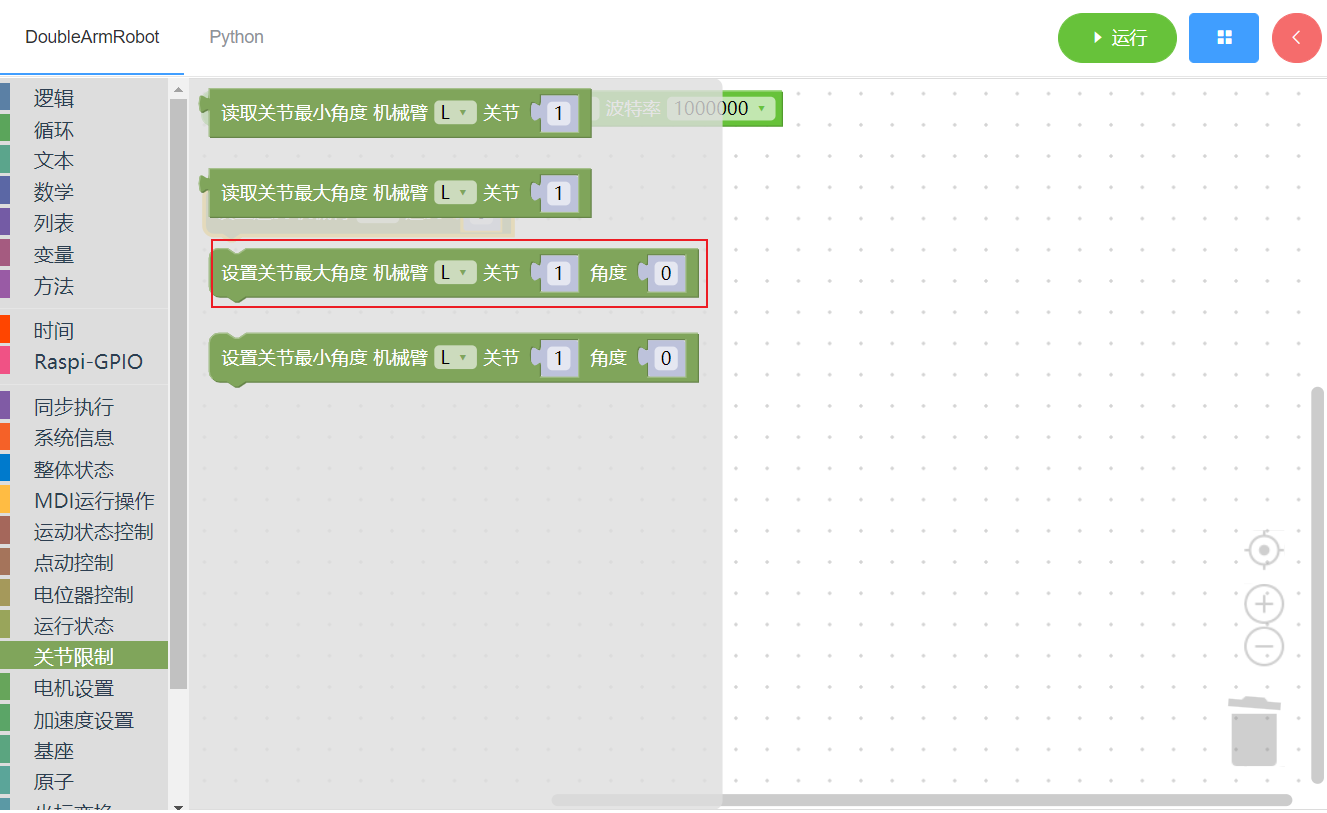
3.8.3 设置关节最大角度
1. API说明
- 功能:设置机械臂关节最大角度
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部JOINT:关节id(1~6)ANGLE:角度
- 返回值 :无
2.积木块展示
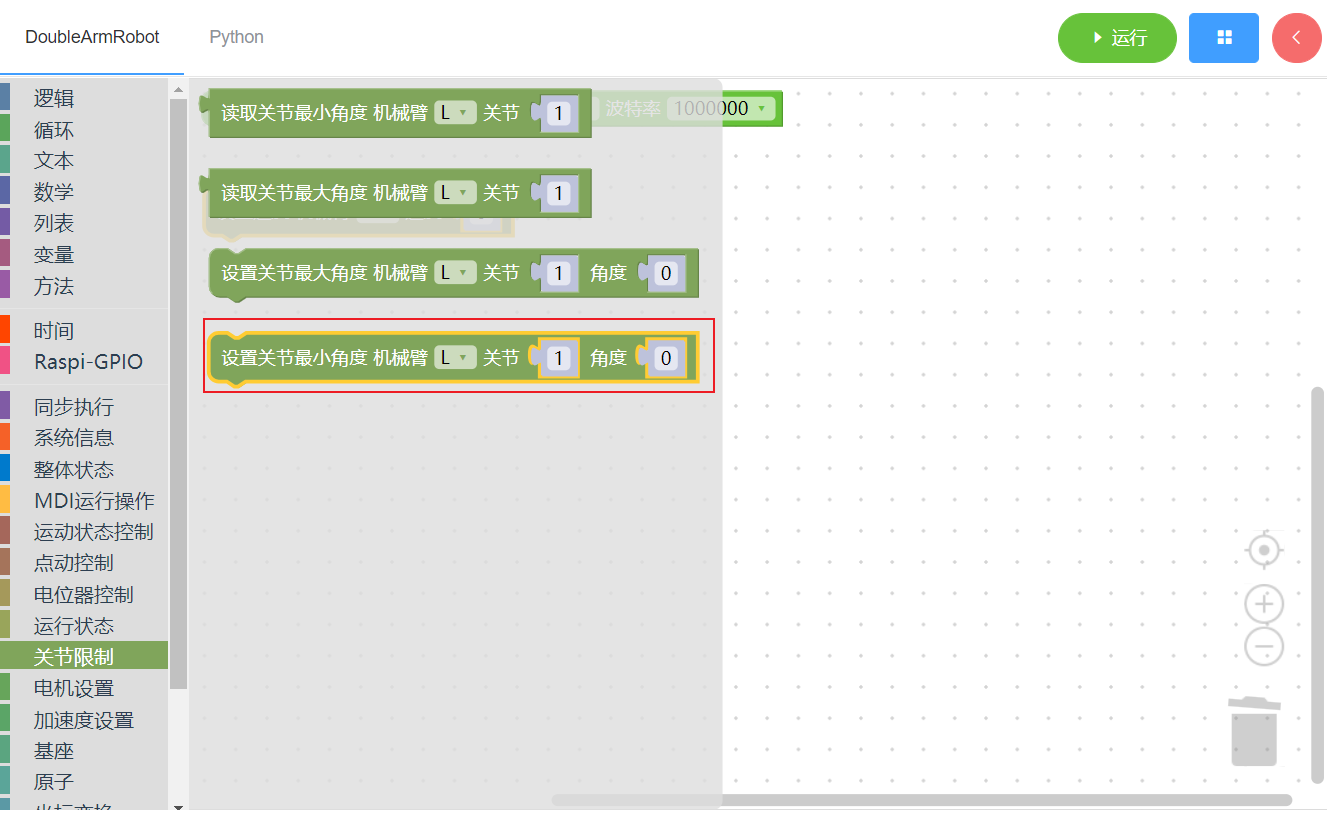
3.8.4 设置关节最小角度
1. API说明
- 功能:设置机械臂关节最小角度
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部JOINT:关节id(1~6)ANGLE:角度
- 返回值 :无
2.积木块展示
3.9 电机设置
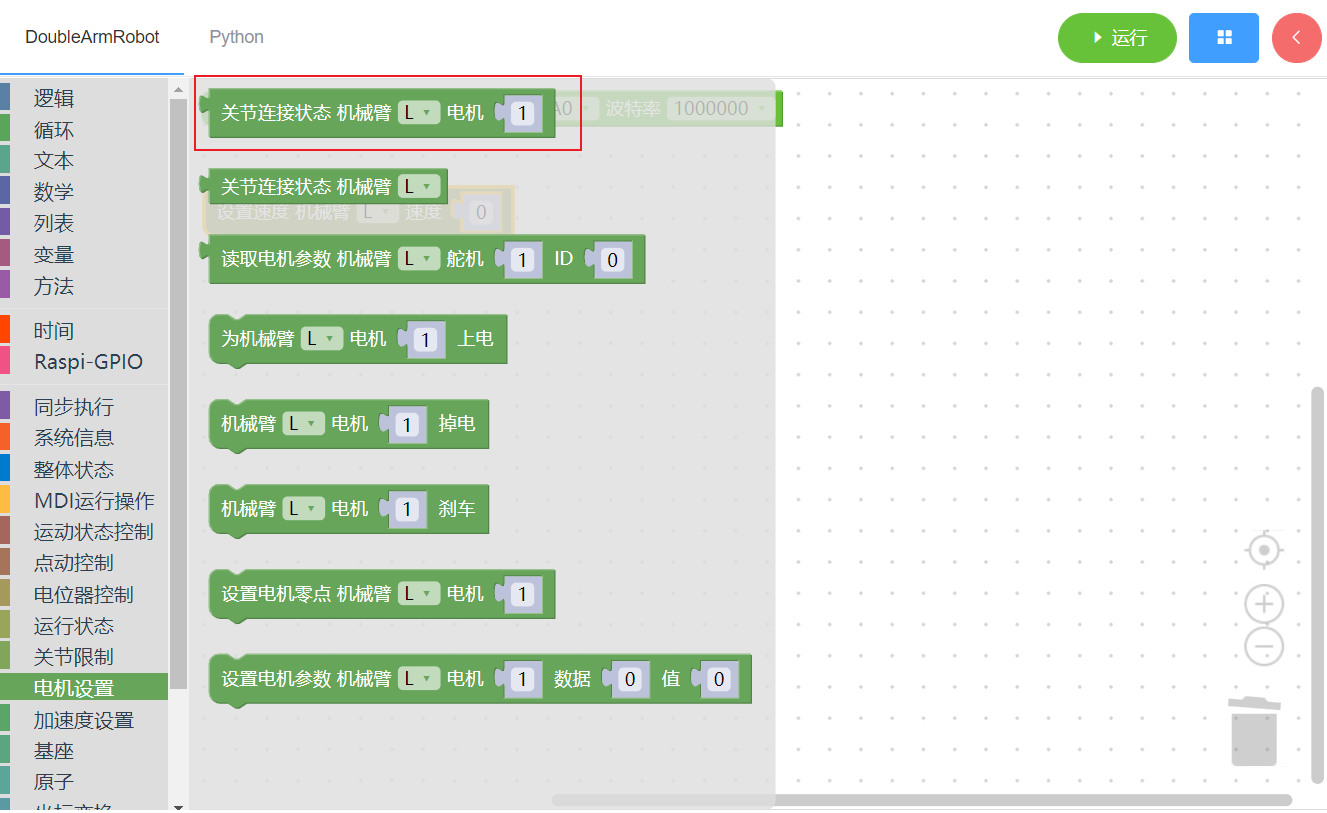
3.9.1 关节连接状态
1. API说明
- 功能:检查机械臂指定关节是否连接
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部SERVOID:电机id(1~6)
- 返回值 :
- 0 禁用
- 1 启用
- -1 错误
2.积木块展示
3.9.2 所有关节连接连接状态
1. API说明
- 功能:检查机械臂全部关节是否连接
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部
- 返回值 :
- 0 禁用
- 1 启用
- -1 错误
2.积木块展示

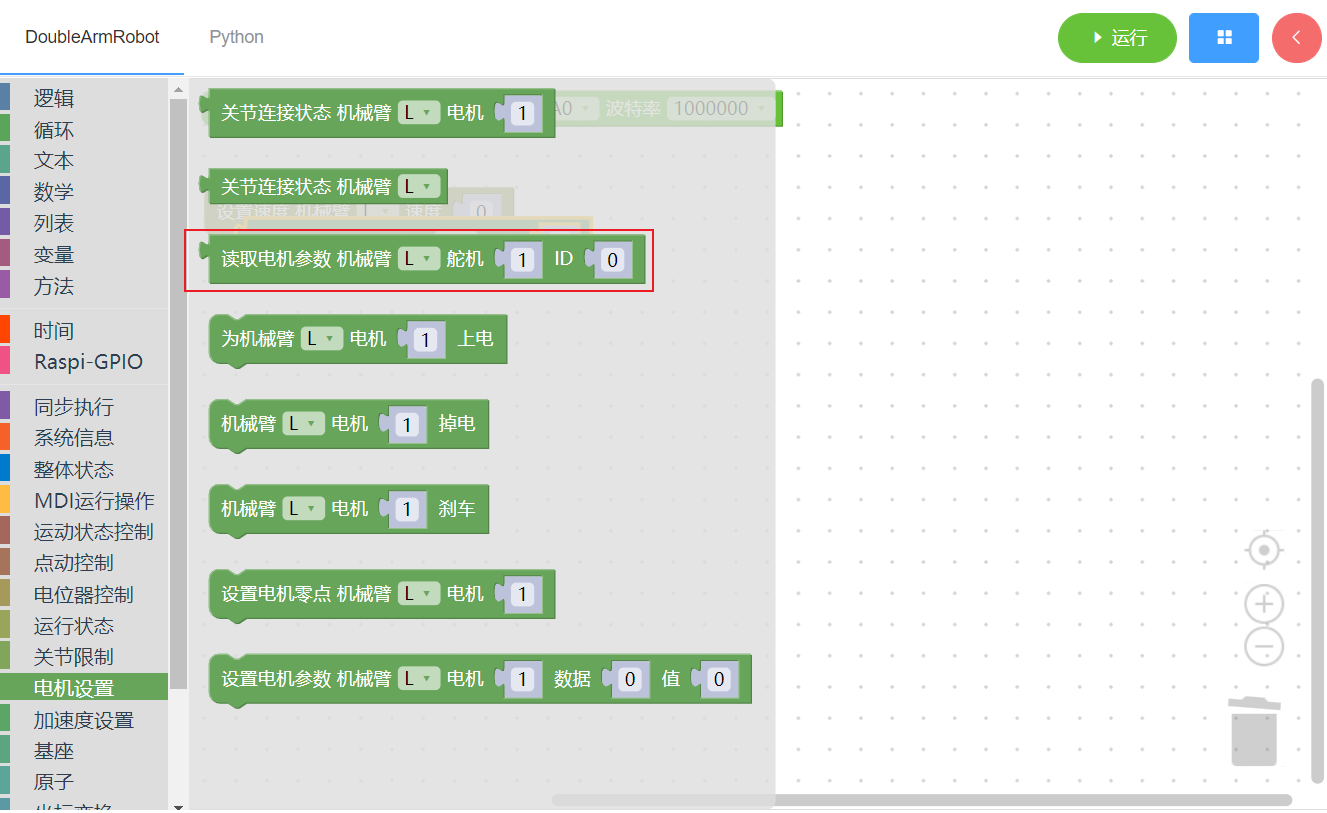
3.9.3 读取电机参数
1. API说明
- 功能:读取电机指定地址的数据参数
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部SERVOID:电机id(1~6)DATA_ID:地址
- 返回值 :
- 0 禁用
- 1 启用
- -1 错误
2.积木块展示
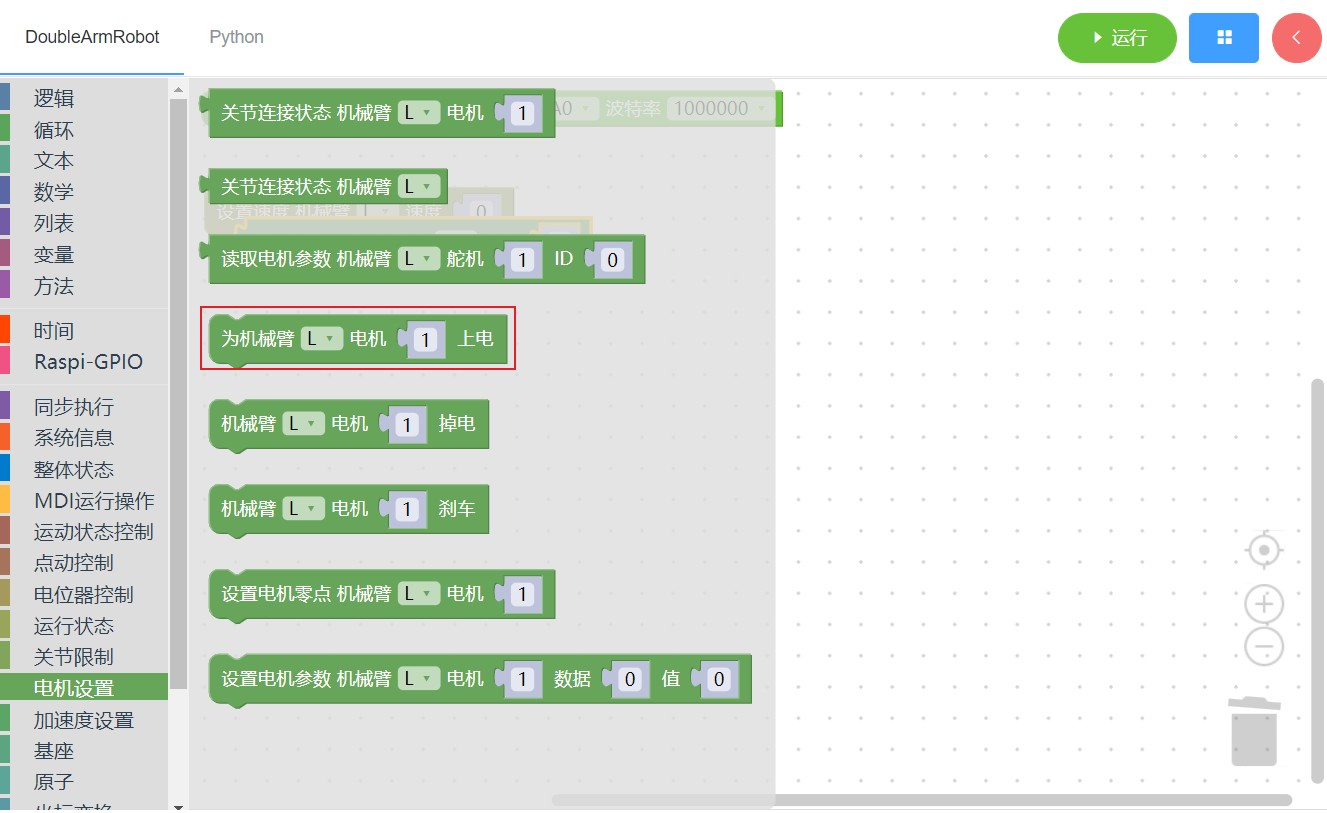
3.9.4 单个电机上电
1. API说明
- 功能:为机械臂单个电机上电
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部SERVOID:电机id(1~6)
- 返回值 :无
2.积木块展示
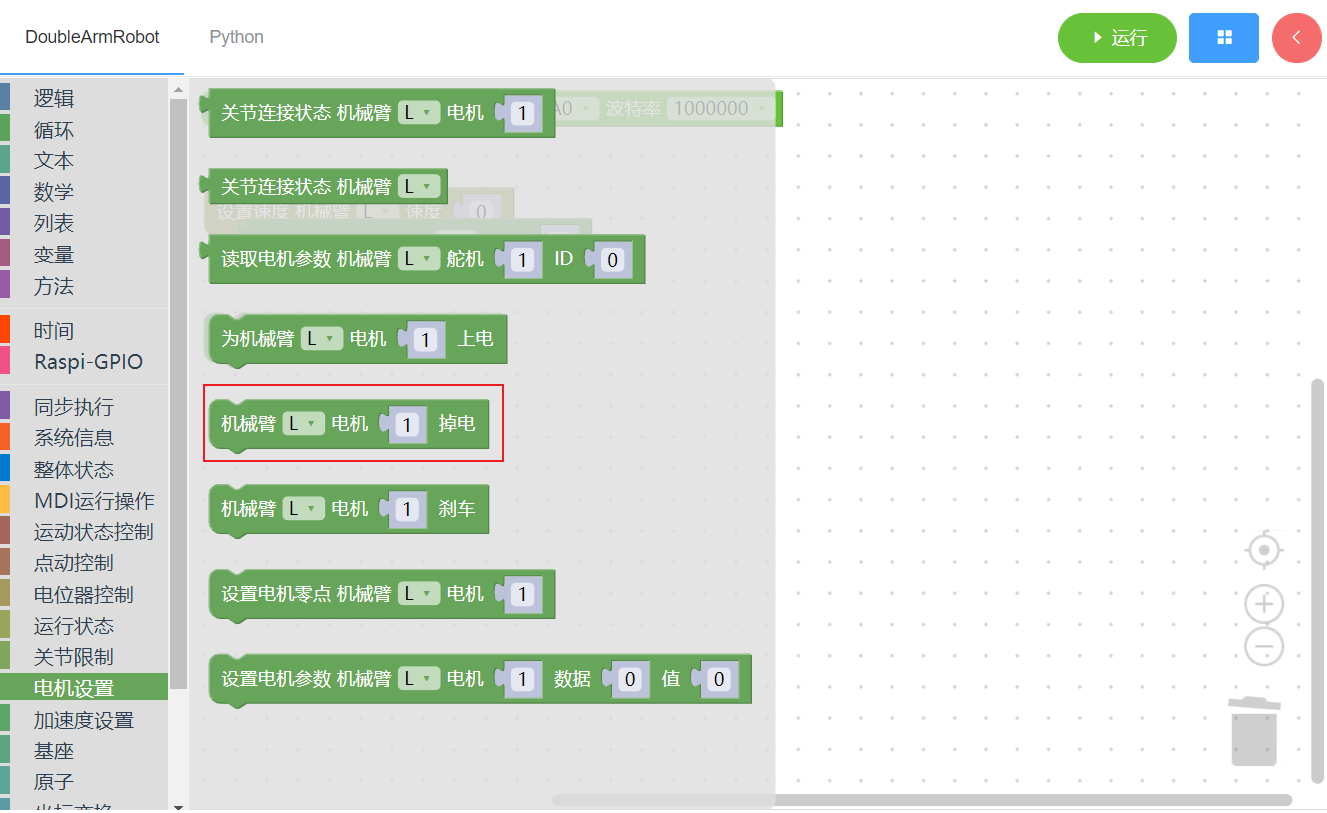
3.9.5 单个电机掉电
1. API说明
- 功能:为机械臂单个电机掉电
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部SERVOID:电机id(1~6)
- 返回值 :无
2.积木块展示
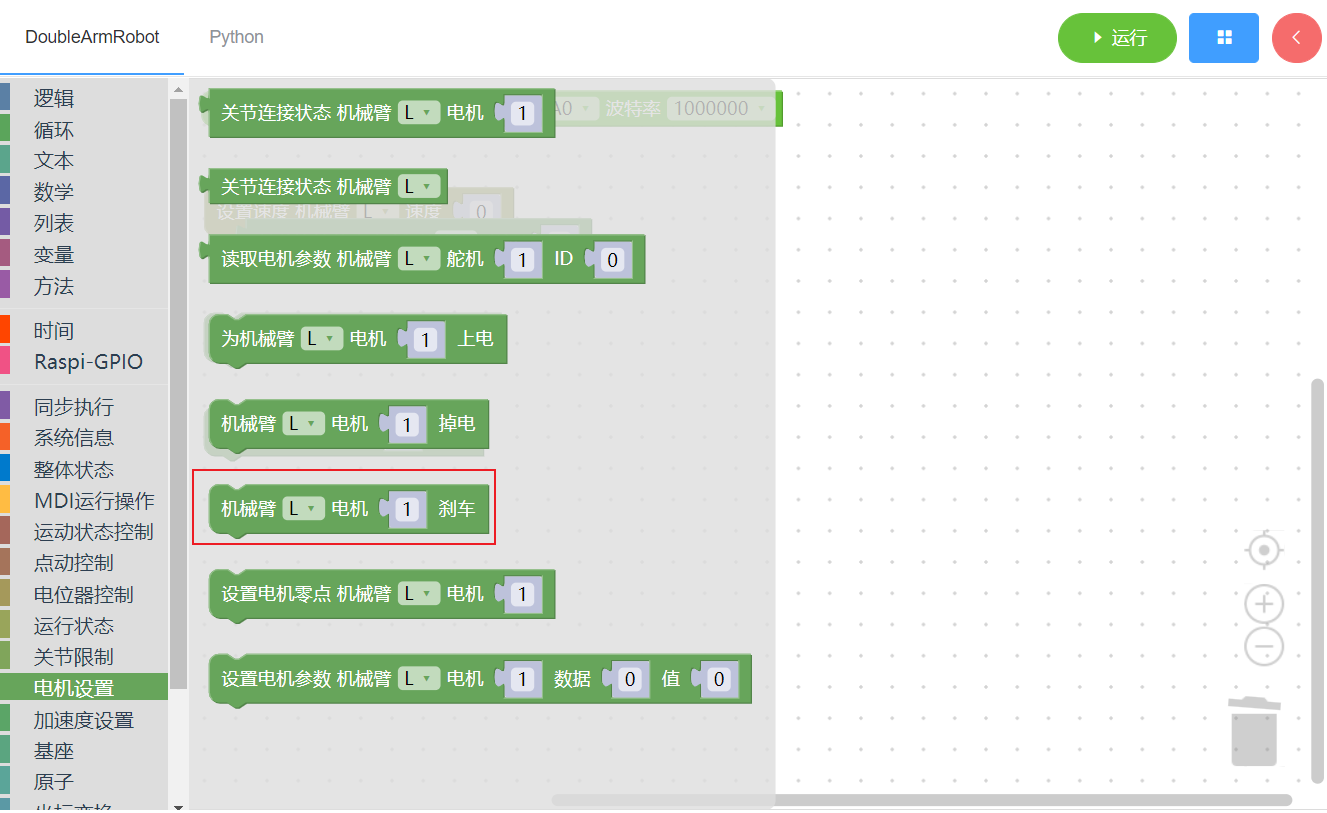
3.9.6 单个关节刹车
1. API说明
- 功能:机械臂单个关节刹车
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部JOINT:关节id(1~6)
- 返回值 :无
2.积木块展示
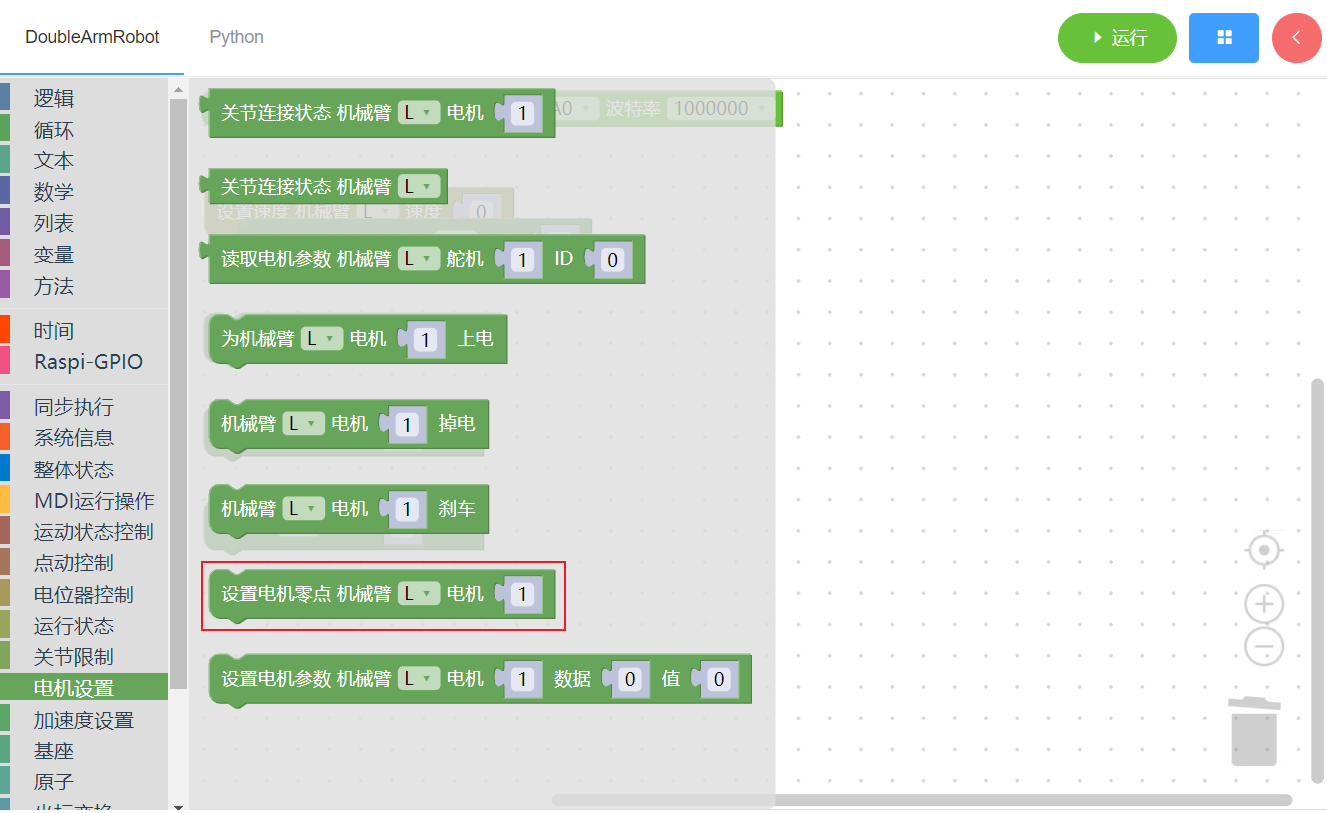
3.9.7 设置电机零点
1. API说明
- 功能:设置电机
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部JOINT:关节id(1~6)
- 返回值 :无
2.积木块展示
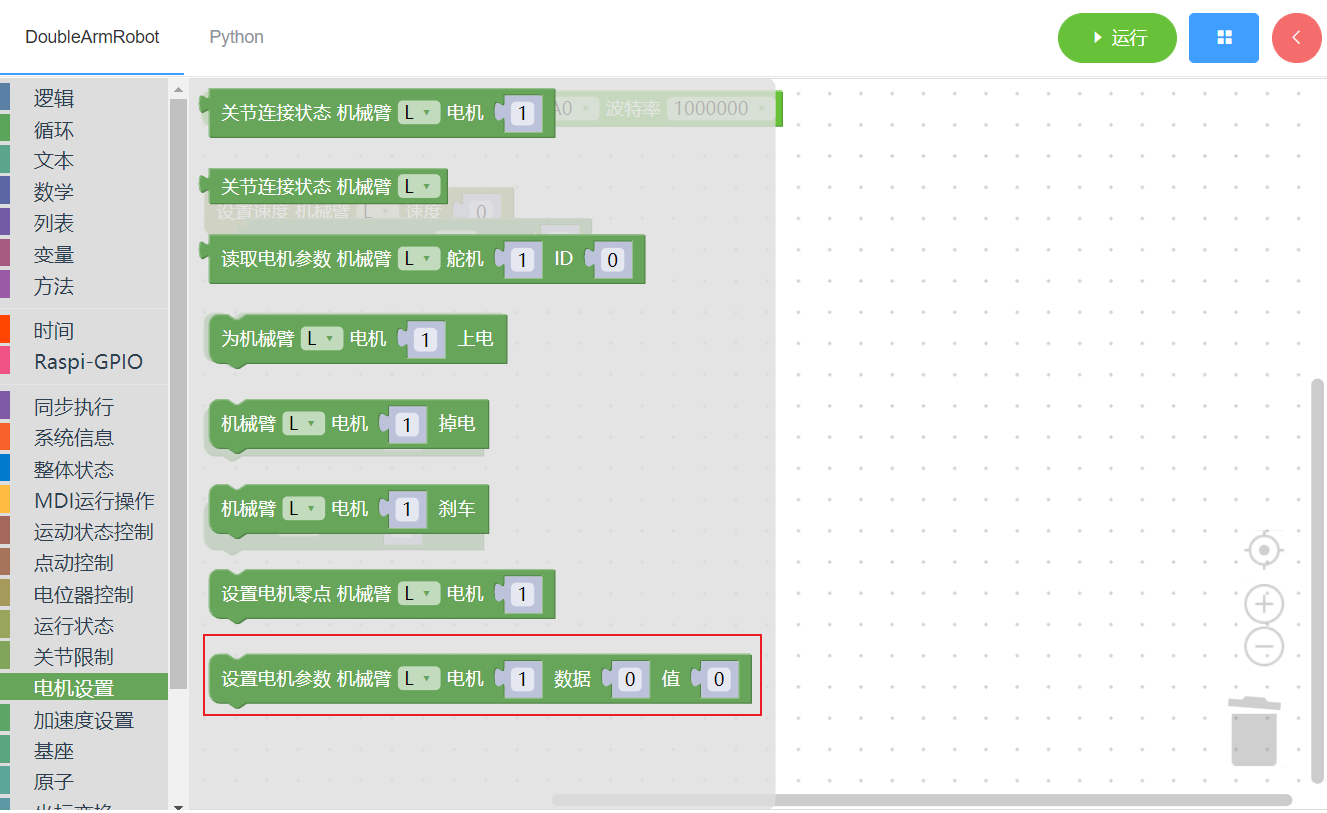
3.9.8 设置电机参数
1. API说明
- 功能:设置单个电机参数
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部SERVO_ID:电机id(1~6)DATA:数据地址VALUE:值
- 返回值 :无
2.积木块展示
3.10 加速度设置
3.10.1 读取加速度
1. API说明
- 功能:读取所有移动过程中的加速度
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部
- 返回值 :
SPEED:速度
2.积木块展示
3.10.2 设置移动加速度
1. API说明
- 功能:设置移动过程中的加速度
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部ACC:数字(1~100)
- 返回值 :无
2.积木块展示
3.11 基座
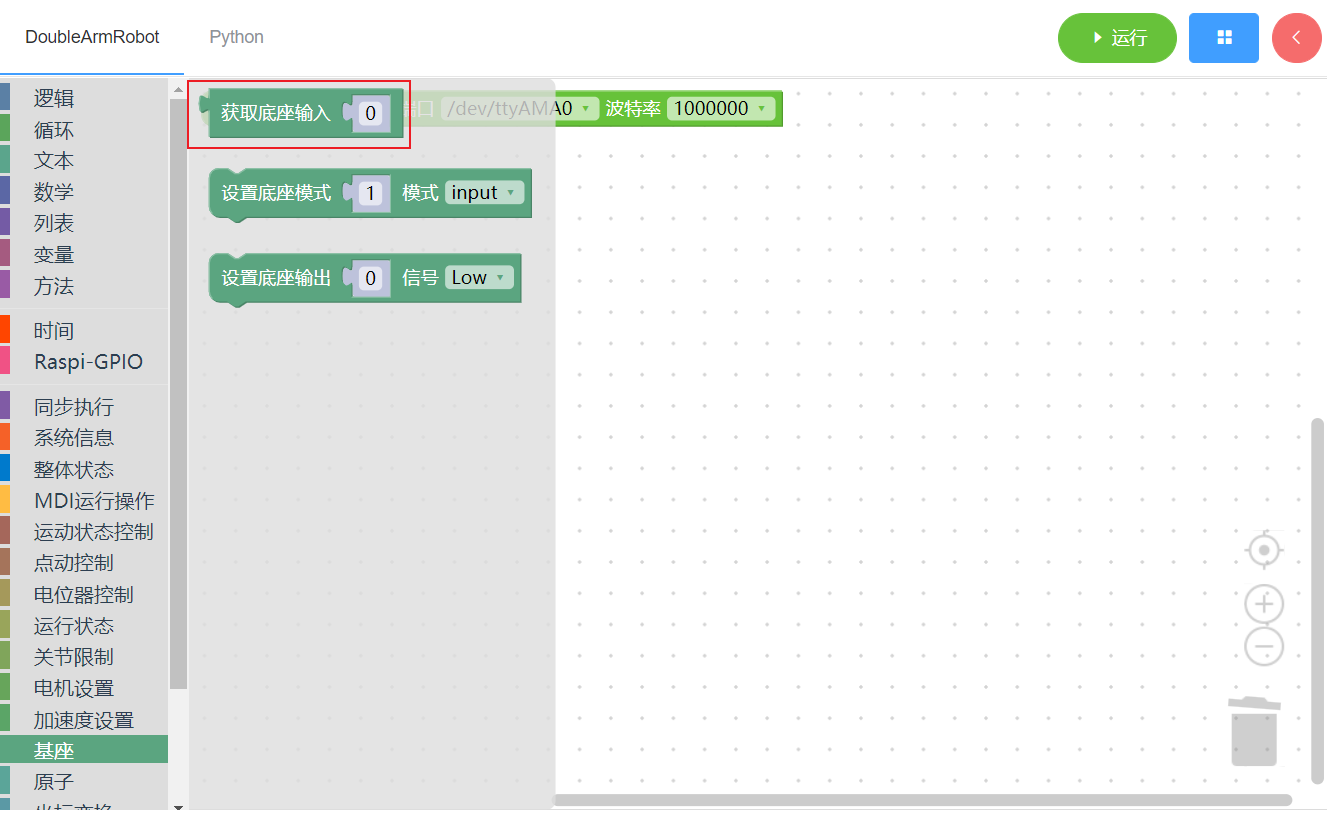
3.11.1 获取底座输入
1. API说明
- 功能:获取底座输入
- 参数:
PIN_NO:整数(0~20)
- 返回值 :待定
2.积木块展示
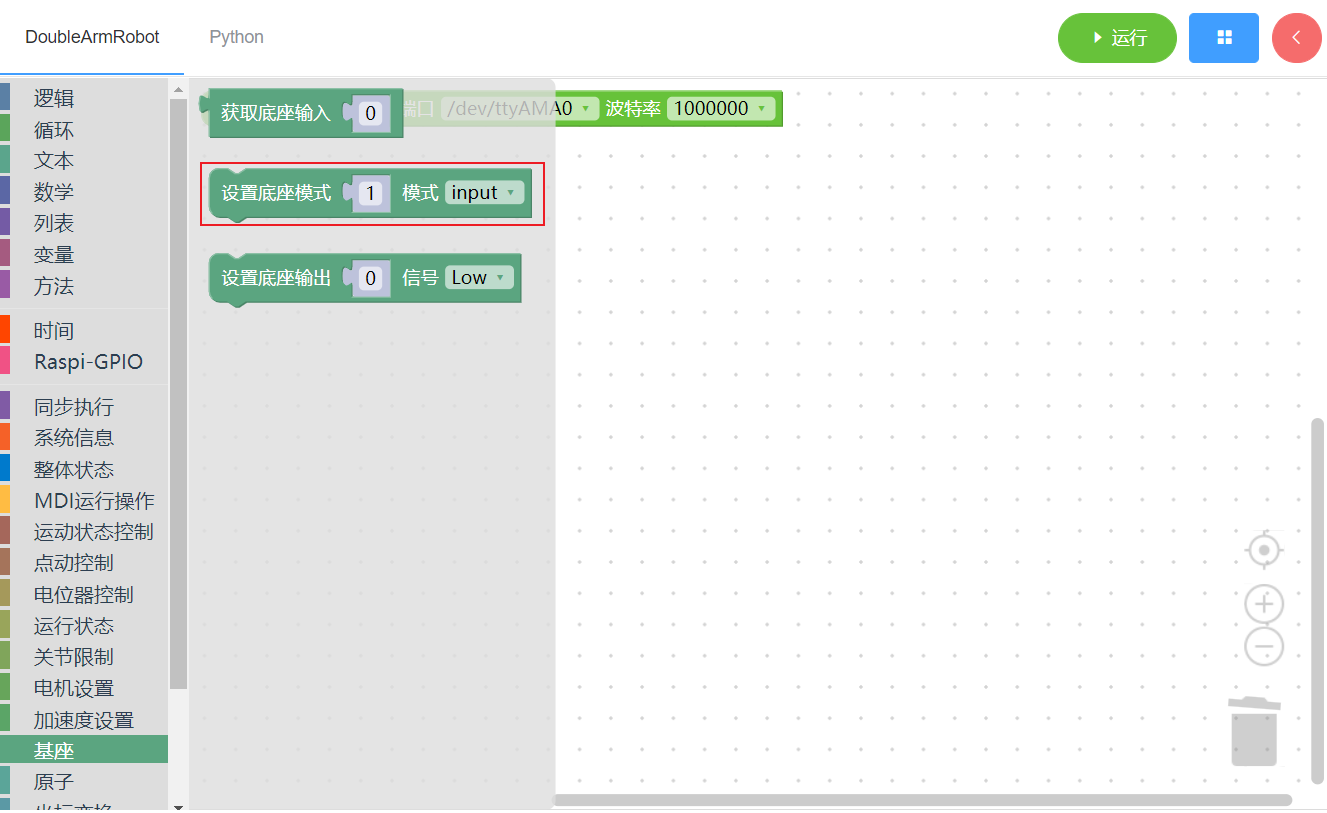
3.11.2 设置底座模式
1. API说明
- 功能:设置底座输入输出模式
- 参数:
PIN_NO:整数(1~5)PIN_MODE:input- 输入 ,output -输出
- 返回值 :无
2.积木块展示
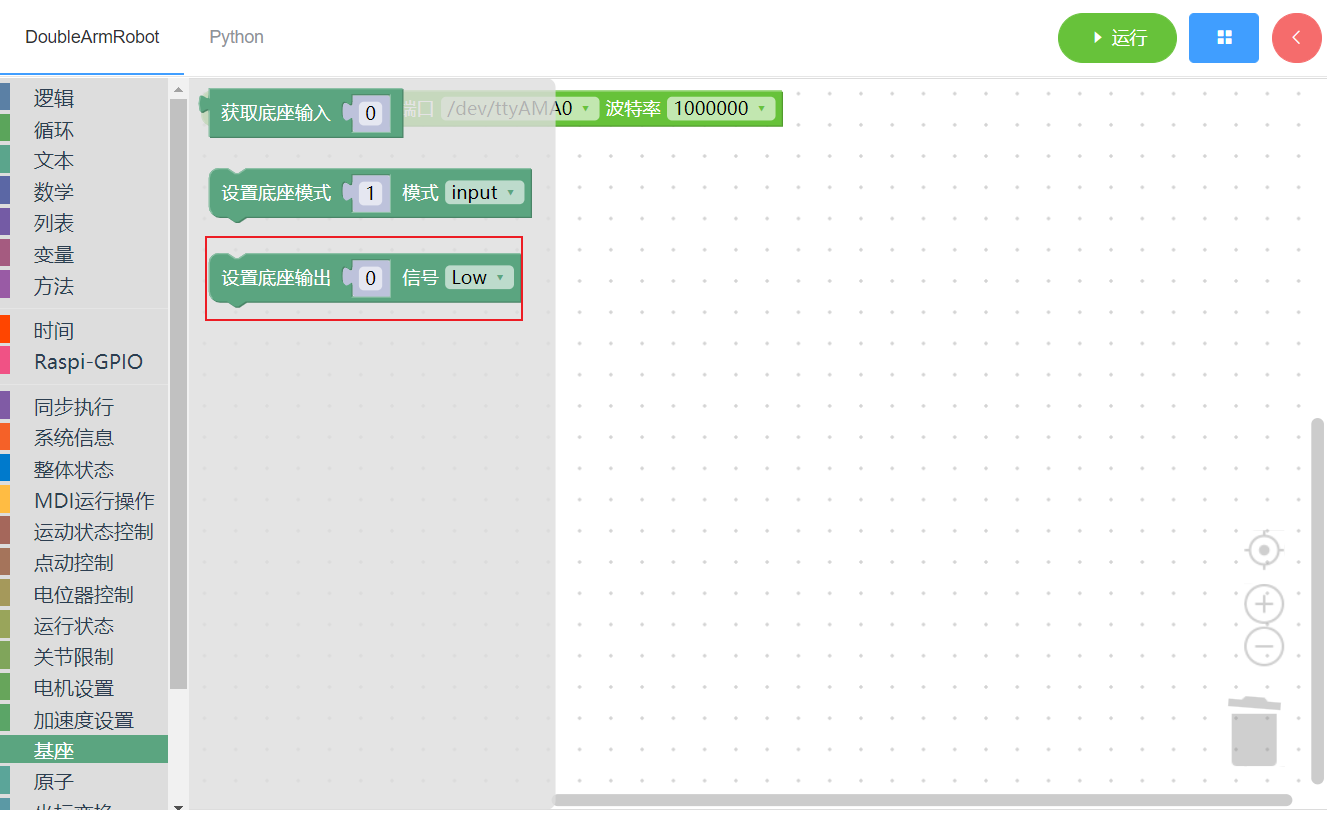
3.11.3 设置底座输出
1. API说明
- 功能:设置底座输出
- 参数:
PIN_NO:整数(0~20)PIN_SIGNAL:low- 低 ,high -高
- 返回值 :无
2.积木块展示
3.12 原子
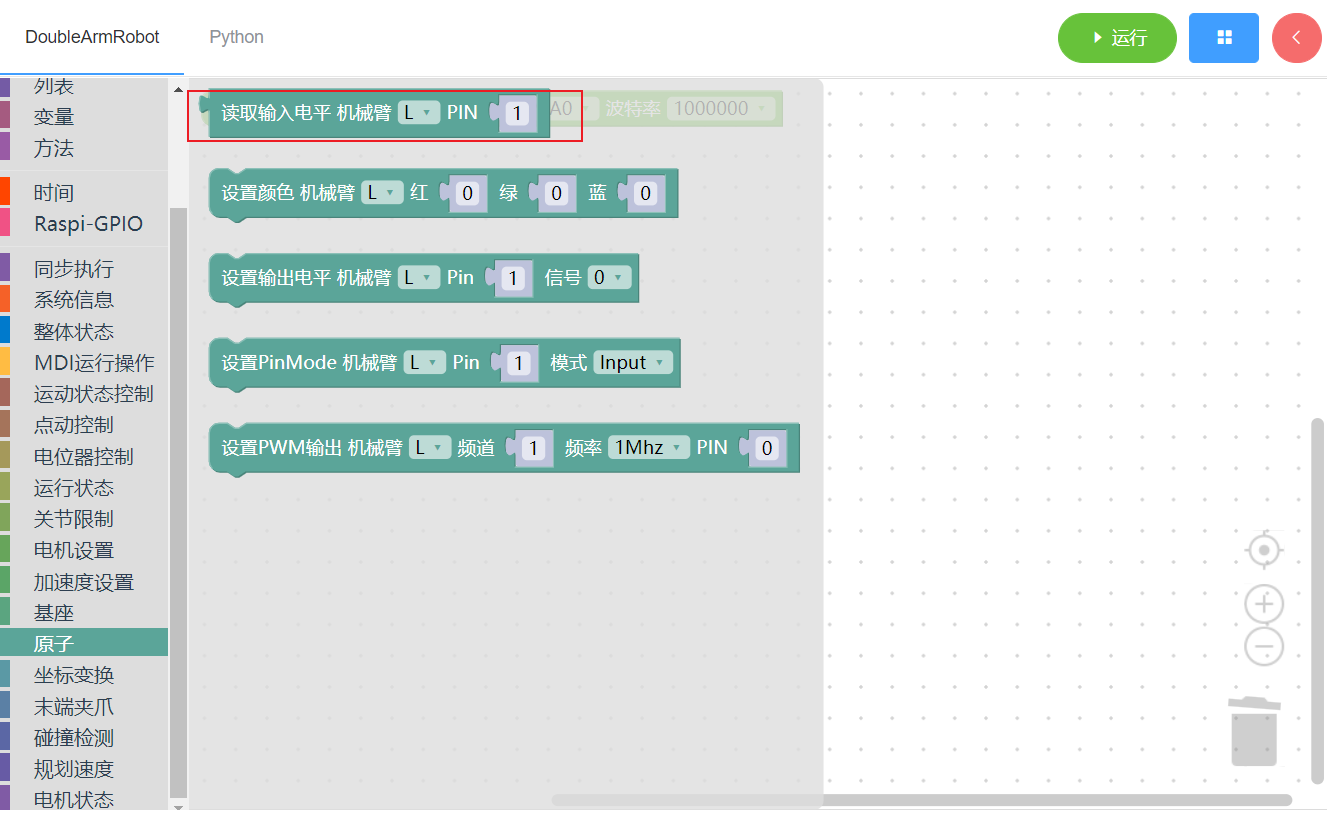
3.12.1 读取输入电平
1. API说明
- 功能:读取输入电平
- 参数:
ID(L/R):L对应左臂,R对应右臂PIN_NO:数字(1~5)
- 返回值 :信号值
2.积木块展示
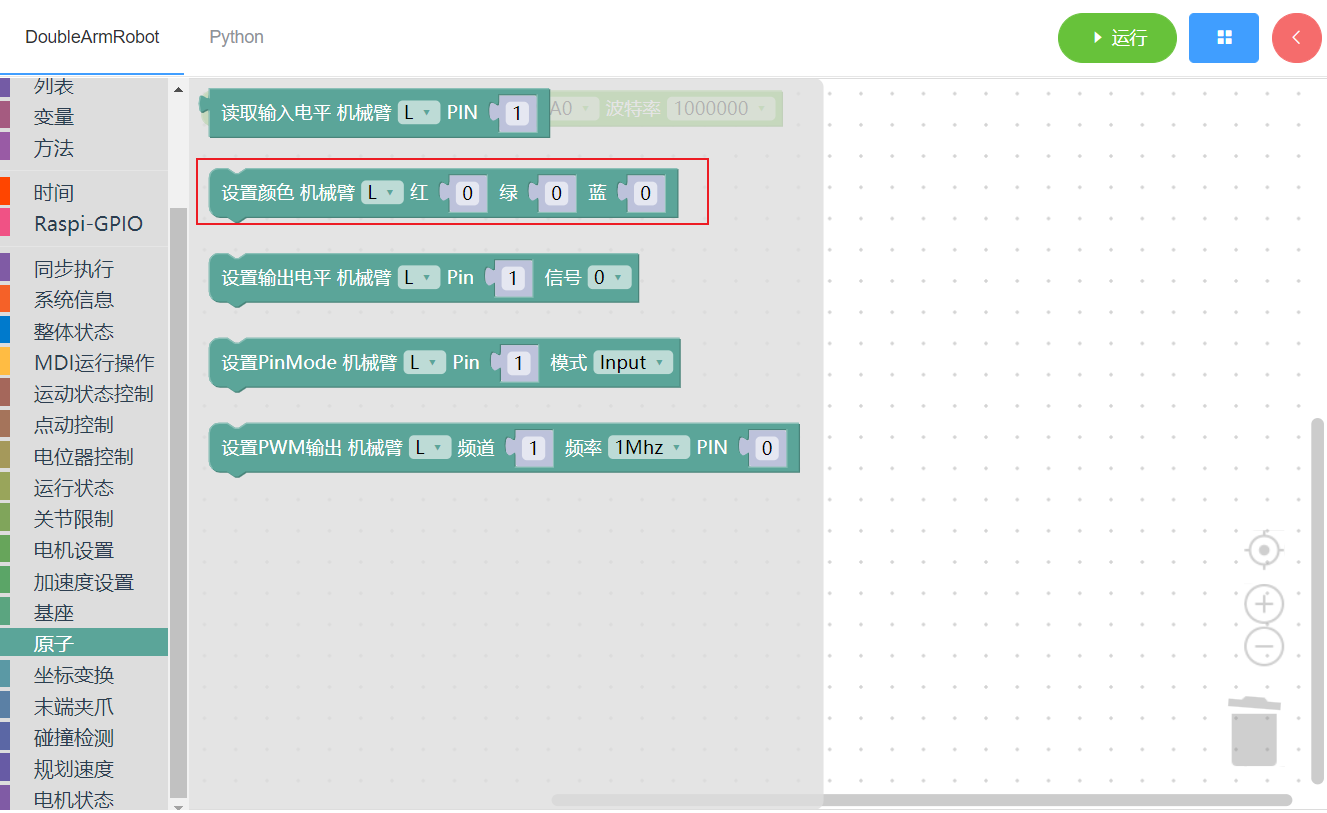
3.12.2 设置颜色
1. API说明
- 功能:设置机械臂顶部手臂的颜色
- 参数:
ID(L/R):L对应左臂,R对应右臂RED:数字(0~255)GREEN:数字(0~255)BLUE:数字(0~255)
- 返回值 :无
2.积木块展示
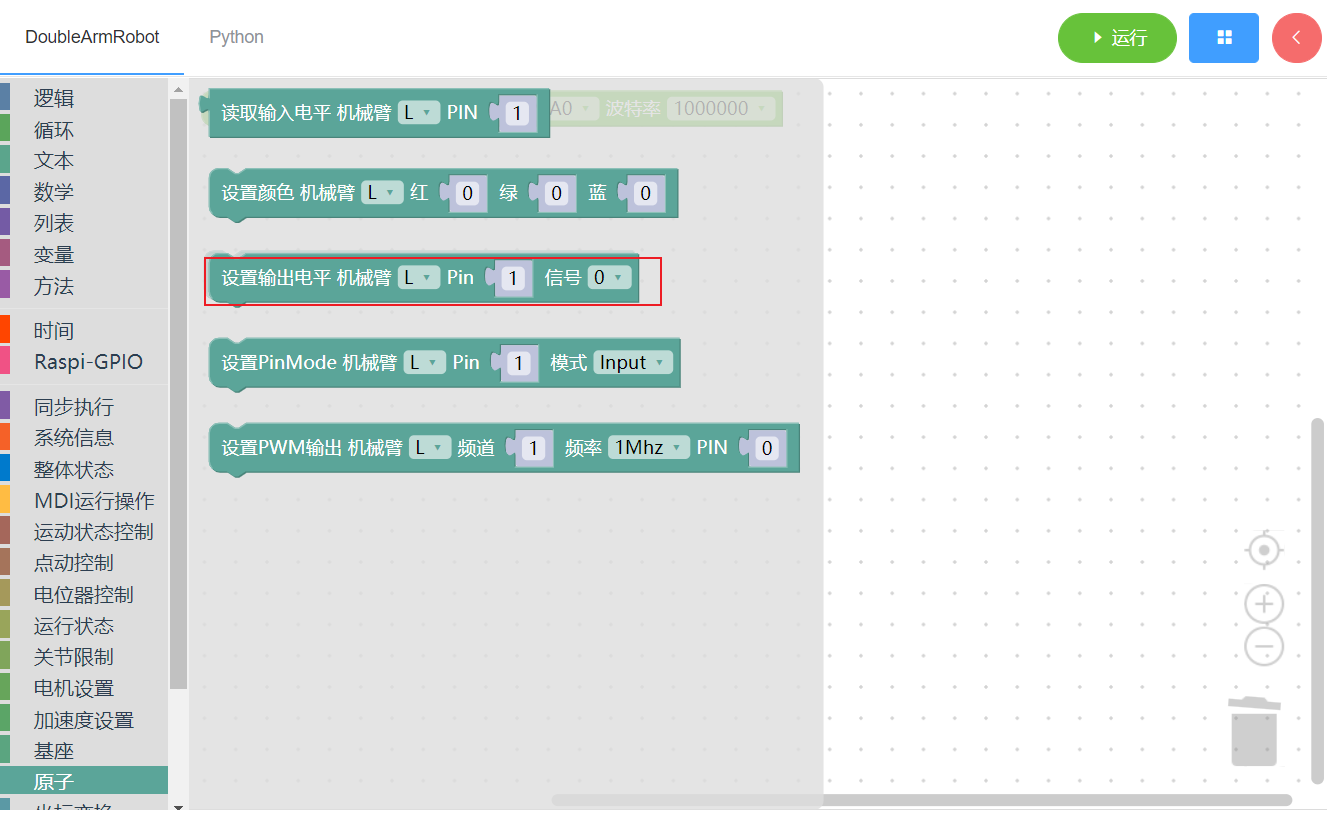
3.12.3 设置输出电平
1. API说明
- 功能:设置输出电平
- 参数:
ID(L/R):L对应左臂,R对应右臂PIN_NO:数字(1~5)SIGNAL:0/1
- 返回值 :无
2.积木块展示
3.12.4 设置PinMode
1. API说明
- 功能:设置原子中指定引脚的状态模式。
- 参数:
ID(L/R):L对应左臂,R对应右臂PIN_NO:数字(1~5)PIN_MODE:0 - 输入 ,1-输出
- 返回值 :无
2.积木块展示

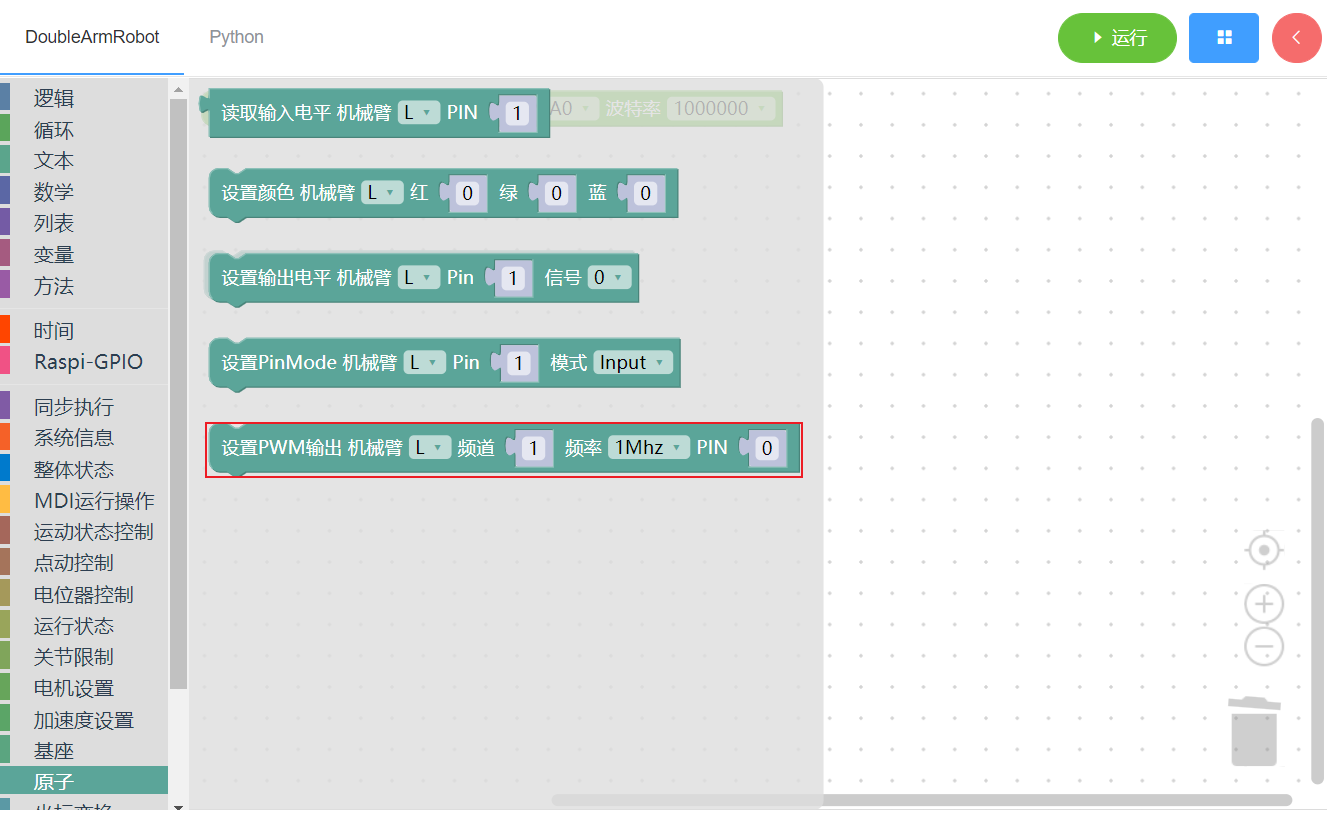
3.12.5 设置PWM输出
1. API说明
- 功能:设置PWM输出。
- 参数:
ID(L/R):L对应左臂,R对应右臂CHANNEL:数字(1~5)FREQUENCY:频率 0 - 1Mhz ,1- 10MhzPIN_VAL:数字(0~100)
- 返回值 :无
2.积木块展示
3.13 坐标变换
3.13.1 获取末端坐标系
1. API说明
- 功能:获取末端坐标系
- 参数:
ID(ALL/L/R):ALL对应全部,L对应左臂,R对应右臂
- 返回值 :
- 0 - flange,1 - tool
2.积木块展示

3.13.2 设置末端坐标系
1. API说明
- 功能:设置末端坐标系
- 参数:
ID(ALL/L/R):ALL对应全部,L对应左臂,R对应右臂END:0 - flange ,1 - tool
- 返回值 :无
2.积木块展示

3.13.3 获取移动类型
1. API说明
- 功能:获取移动类型
- 参数:
ID(ALL/L/R):ALL对应全部,L对应左臂,R对应右臂
- 返回值 :
- 1 - movel , 0 - moveJ
2.积木块展示

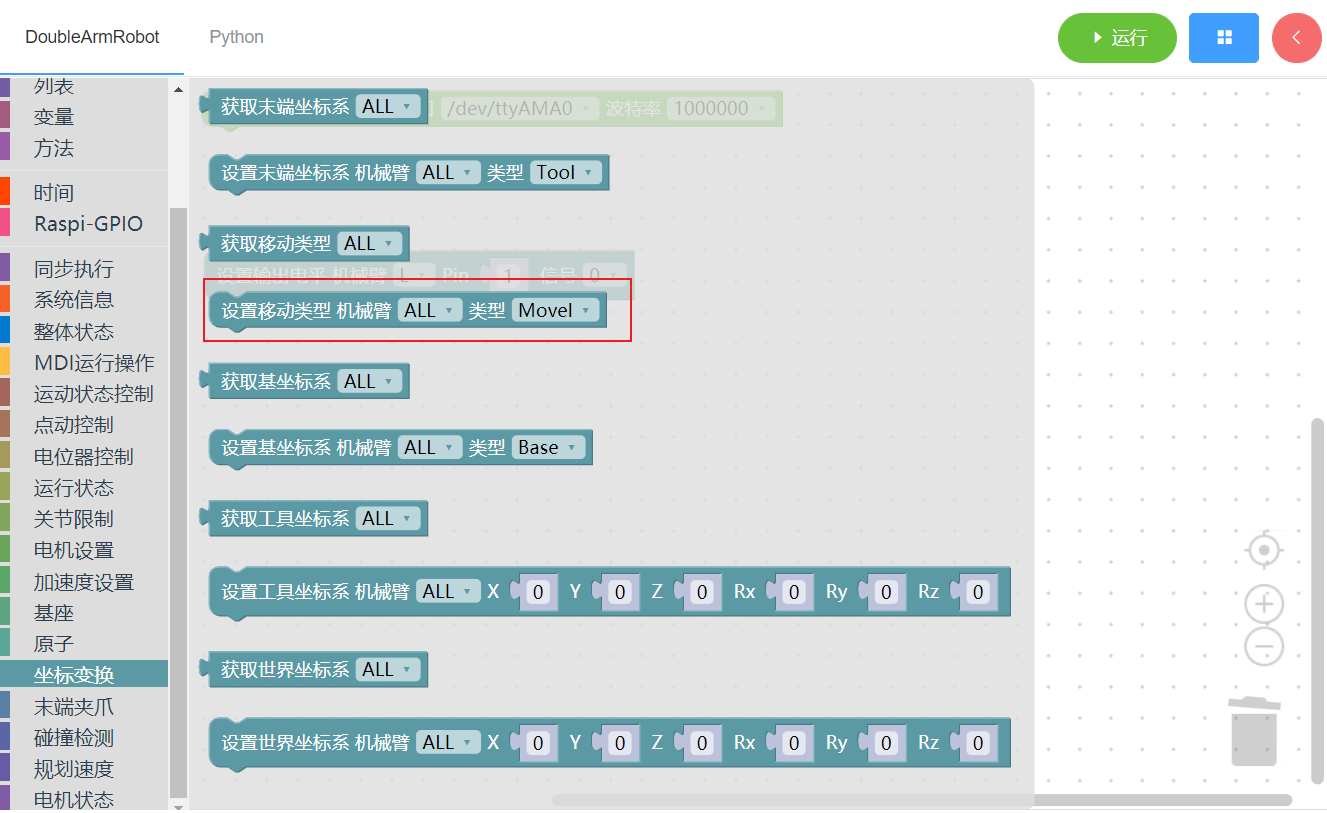
3.13.4 设置移动类型
1. API说明
- 功能:设置移动类型
- 参数:
ID(ALL/L/R):ALL对应全部,L对应左臂,R对应右臂TYPE:1 - movel , 0 - moveJ
- 返回值 :无
2.积木块展示
3.13.5 获取基座标系
1. API说明
- 功能:获取基座标系
- 参数:
ID(ALL/L/R):ALL对应全部,L对应左臂,R对应右臂
- 返回值 :
- 0 - base , 1 - tool
2.积木块展示

3.13.6 设置基座标系
1. API说明
- 功能:设置基座标系
- 参数:
ID(ALL/L/R):ALL对应全部,L对应左臂,R对应右臂TYPE:0 - base , 1 - tool
- 返回值 :无
2.积木块展示

3.13.7 获取工具坐标系
1. API说明
- 功能:获取工具座标系
- 参数:
ID(ALL/L/R):ALL对应全部,L对应左臂,R对应右臂
- 返回值 :
- 待定
2.积木块展示

3.13.8 设置工具坐标系
1. API说明
- 功能:设置工具座标系
- 参数:
ID(ALL/L/R):ALL对应全部,L对应左臂,R对应右臂COORDS:坐标数组(6个坐标)
- 返回值 :无
2.积木块展示

3.13.9 获取世界坐标系
1. API说明
- 功能:获取世界座标系
- 参数:
ID(ALL/L/R):ALL对应全部,L对应左臂,R对应右臂
- 返回值 :
- 待定
2.积木块展示

3.13.10 设置世界坐标系
1. API说明
- 功能:设置世界座标系
- 参数:
ID(ALL/L/R):ALL对应全部,L对应左臂,R对应右臂COORDS:坐标数组(6个坐标)
- 返回值 :无
2.积木块展示

3.14 末端夹爪
3.14.1 获取夹爪角度
1. API说明
- 功能:获取夹爪角度
- 参数:
ID(L/R):L对应左臂,R对应右臂
- 返回值 :
GRIPPER_VALUE:夹爪角度值
2.积木块展示

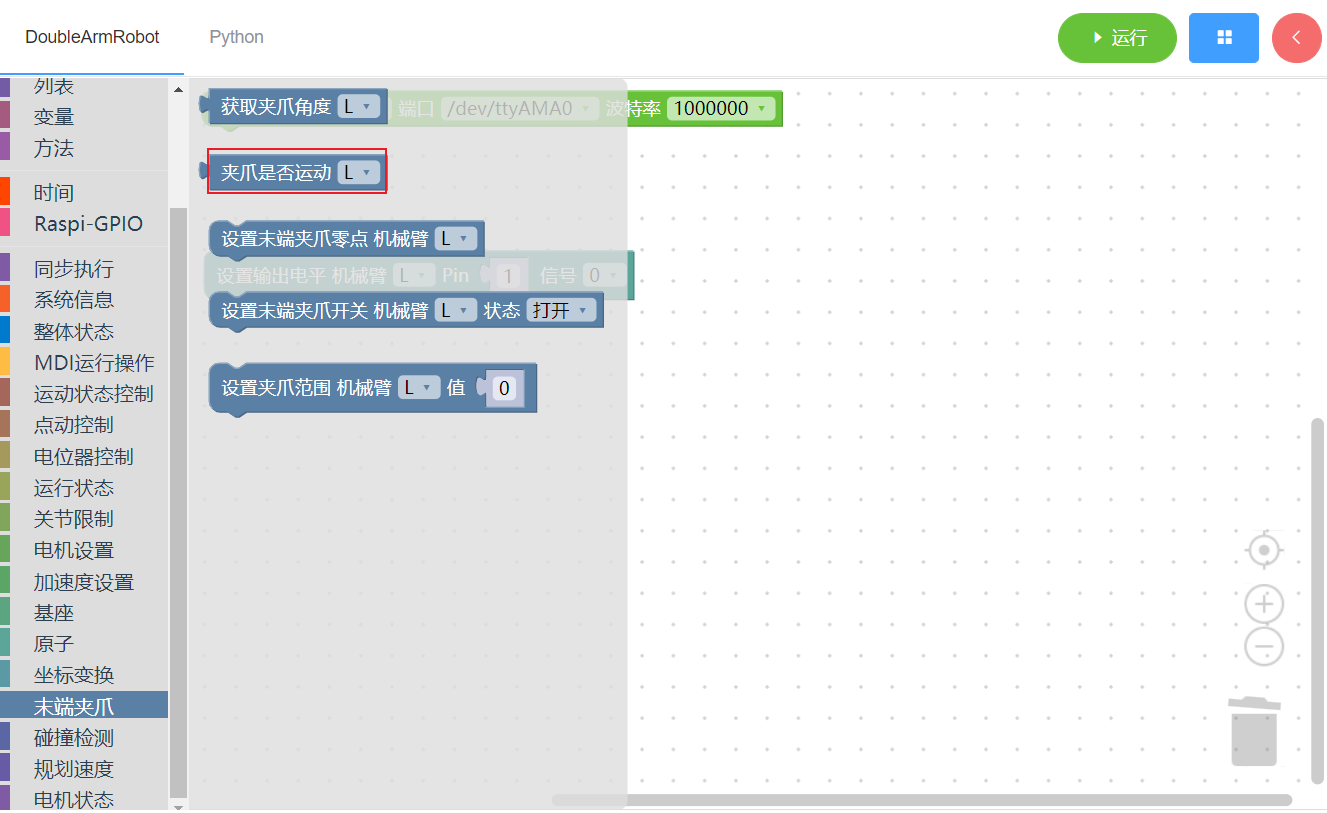
3.14.2 检查夹爪是否在运动
1. API说明
- 功能:检查机械臂夹爪是否在运动
- 参数:
ID(L/R):L对应左臂,R对应右臂
- 返回值 :
VALUE:0 - 未移动,1-正在移动,-1 错误
2.积木块展示
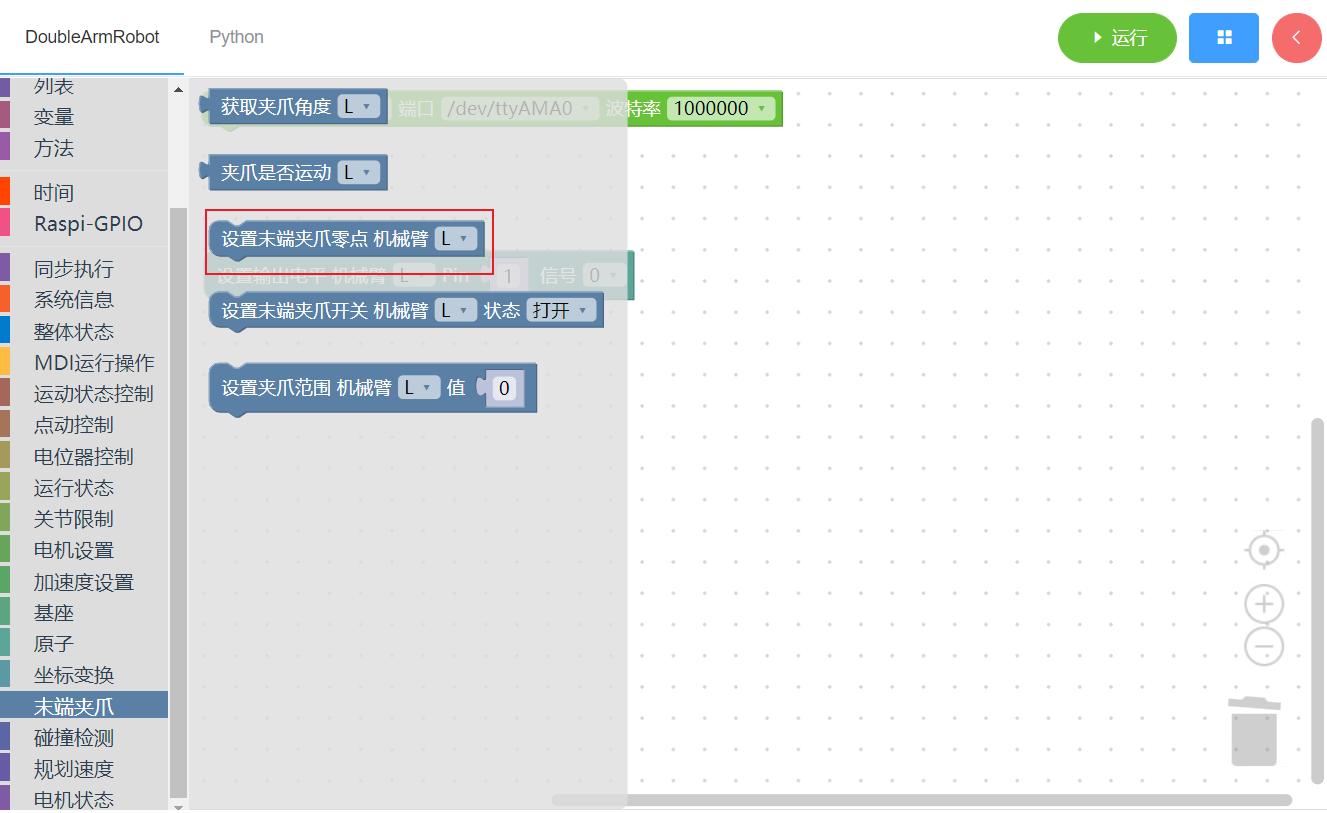
3.14.3 设置末端夹爪零点
1. API说明
- 功能:设置机械臂夹爪零点
- 参数:
ID(L/R):L对应左臂,R对应右臂
- 返回值 :无
2.积木块展示
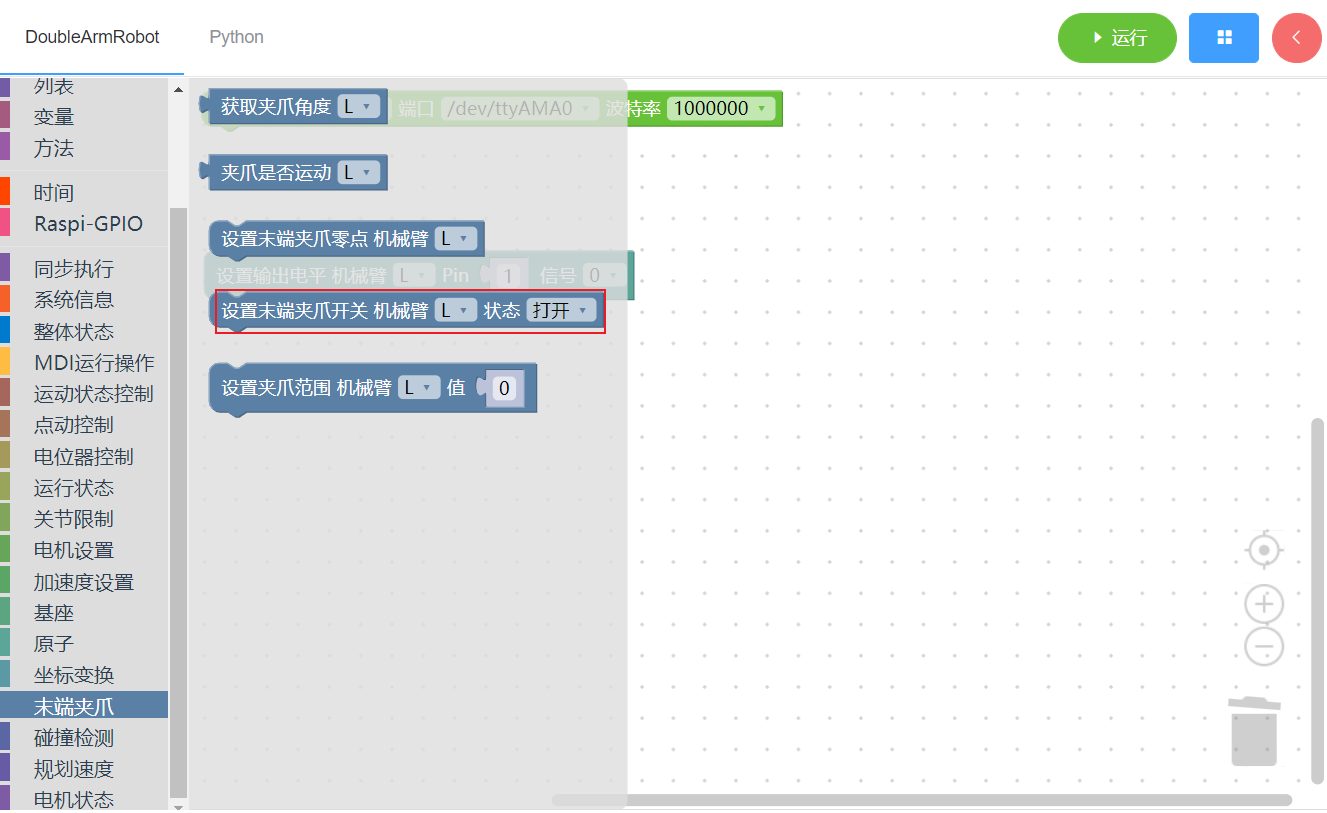
3.14.4 设置末端夹爪状态
1. API说明
- 功能:设置机械臂夹爪状态
- 参数:
ID(L/R):L对应左臂,R对应右臂STATUS:0 - 关闭,1-打开
- 返回值 :无
2.积木块展示
3.14.5 设置夹爪范围
1. API说明
- 功能:设置机械臂夹爪值
- 参数:
ID(L/R):L对应左臂,R对应右臂VALUE:数字(0~100)
- 返回值 :无
2.积木块展示

3.15 碰撞检测
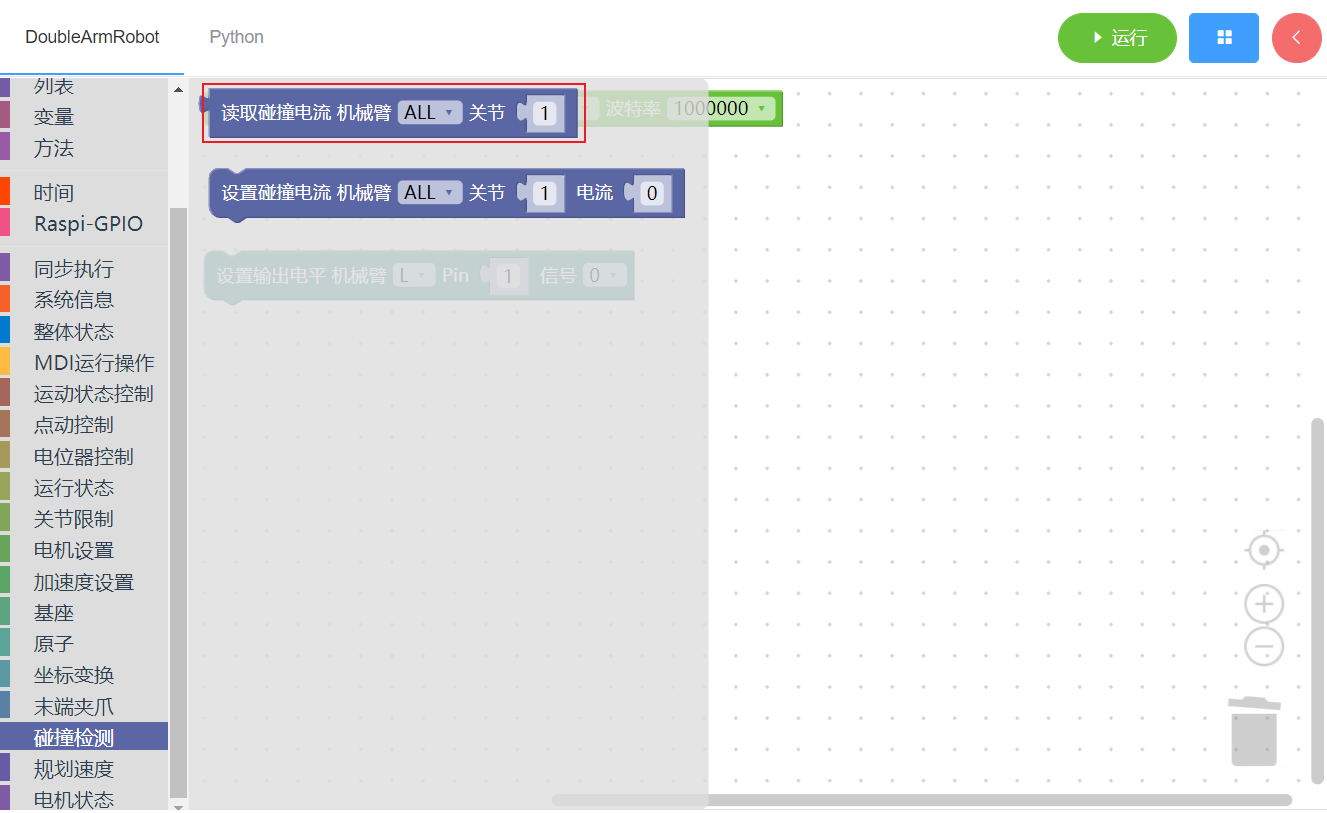
3.15.1 读取碰撞电流
1. API说明
- 功能:读取碰撞电流
- 参数:
ID(ALL/L/R):ALL对应全部,L对应左臂,R对应右臂JOINT_ID:关节id(1~6)
- 返回值 :
CURRENT:电流
2.积木块展示
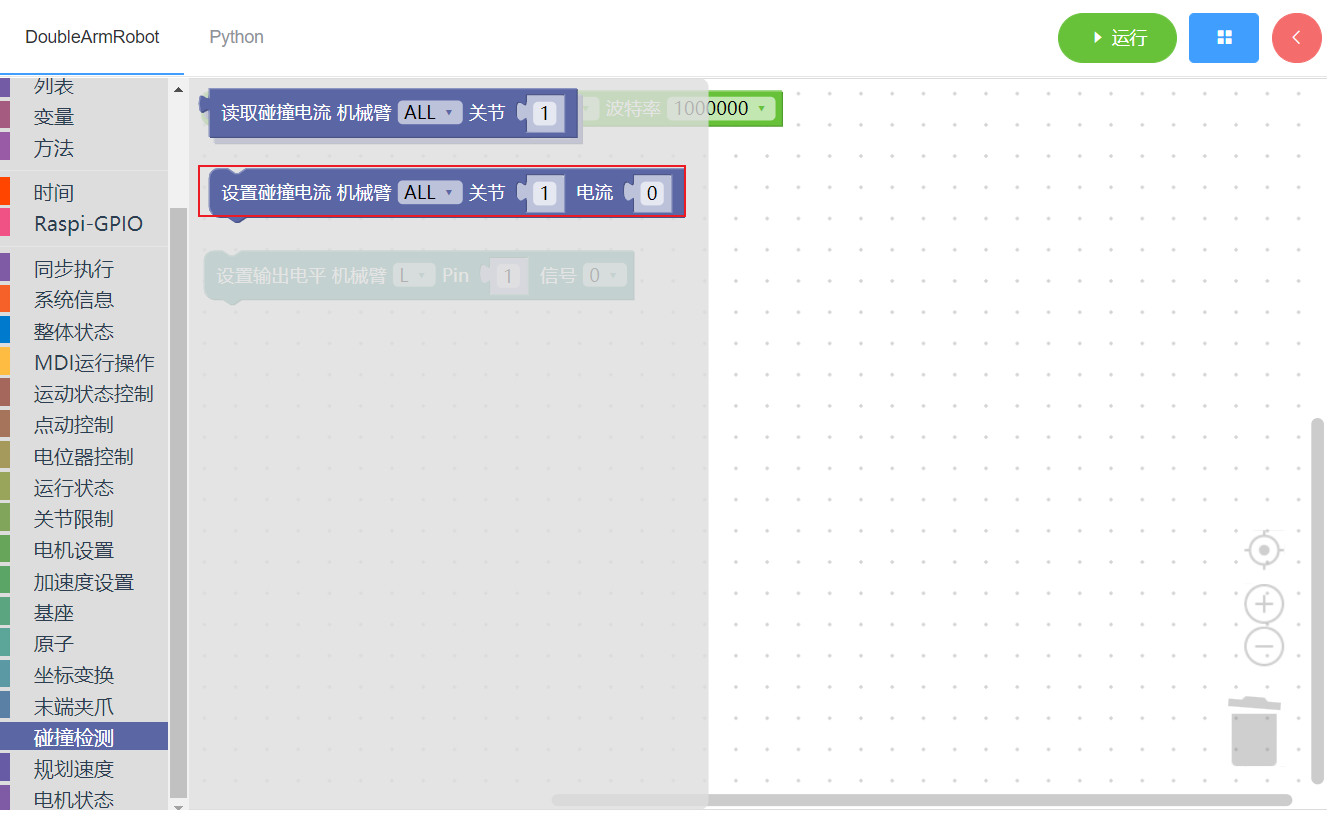
3.15.2 设置碰撞电流
1. API说明
- 功能:设置碰撞电流
- 参数:
ID(ALL/L/R):ALL对应全部,L对应左臂,R对应右臂JOINT_ID:关节id(1~6)CURRENT:数字
- 返回值 :无
2.积木块展示
3.16 规划速度
3.16.1 读取规划加速度
1. API说明
- 功能:读取规划加速度
- 参数:
ID(ALL/L/R/W):ALL对应全部,L对应左臂,R对应右臂,W对应腰部
- 返回值 :
PLAN_ACCELERATION:规划加速度列表
2.积木块展示

3.16.2 读取规划速度
1. API说明
- 功能:读取规划速度
- 参数:
ID(ALL/L/R/W):ALL对应全部,L对应左臂,R对应右臂,W对应腰部
- 返回值 :
PLAN_ACCELERATION:规划速度列表
2.积木块展示

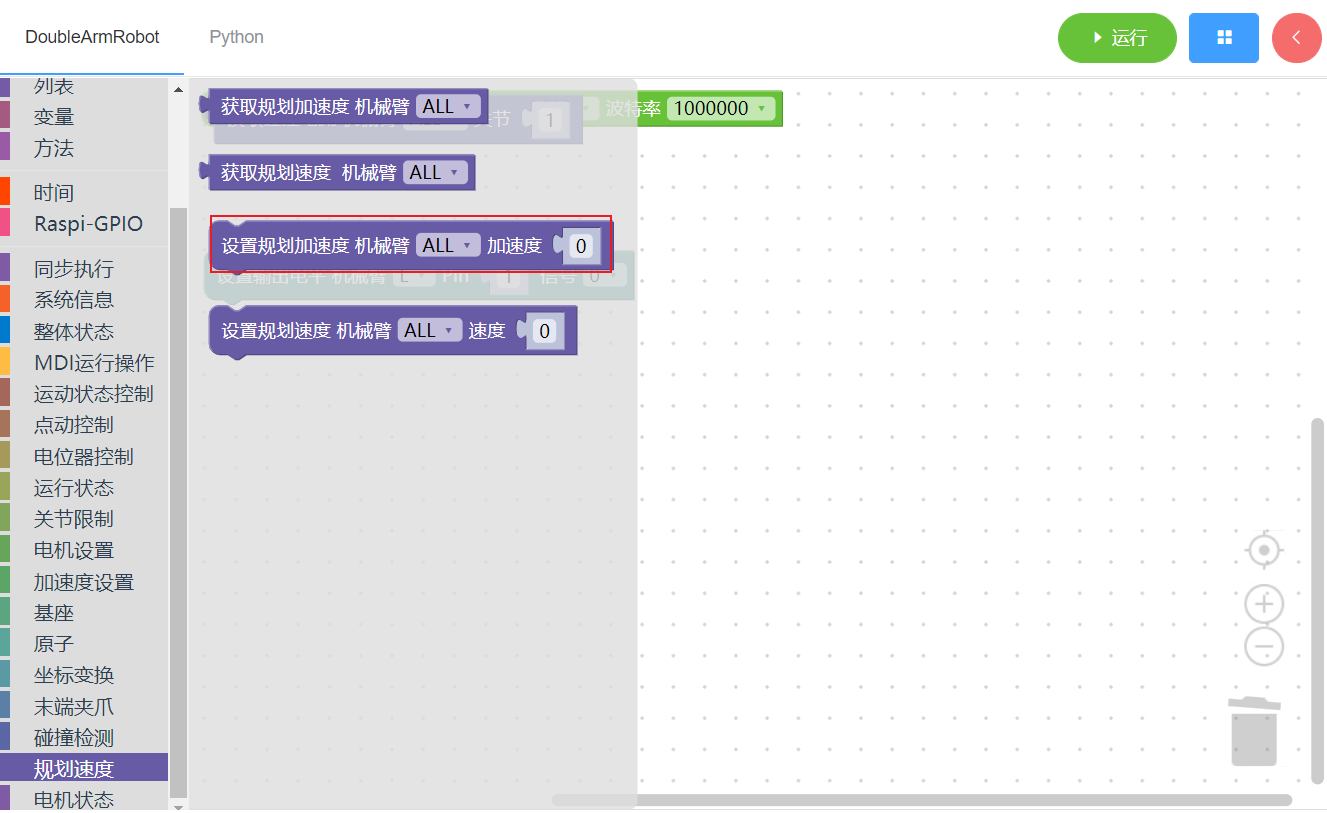
3.16.3 设置规划加速度
1. API说明
- 功能:设置规划加速度
- 参数:
ID(ALL/L/R/W):ALL对应全部,L对应左臂,R对应右臂,W对应腰部ACCELERATION:规划加速度(0~100)
- 返回值 :无
2.积木块展示
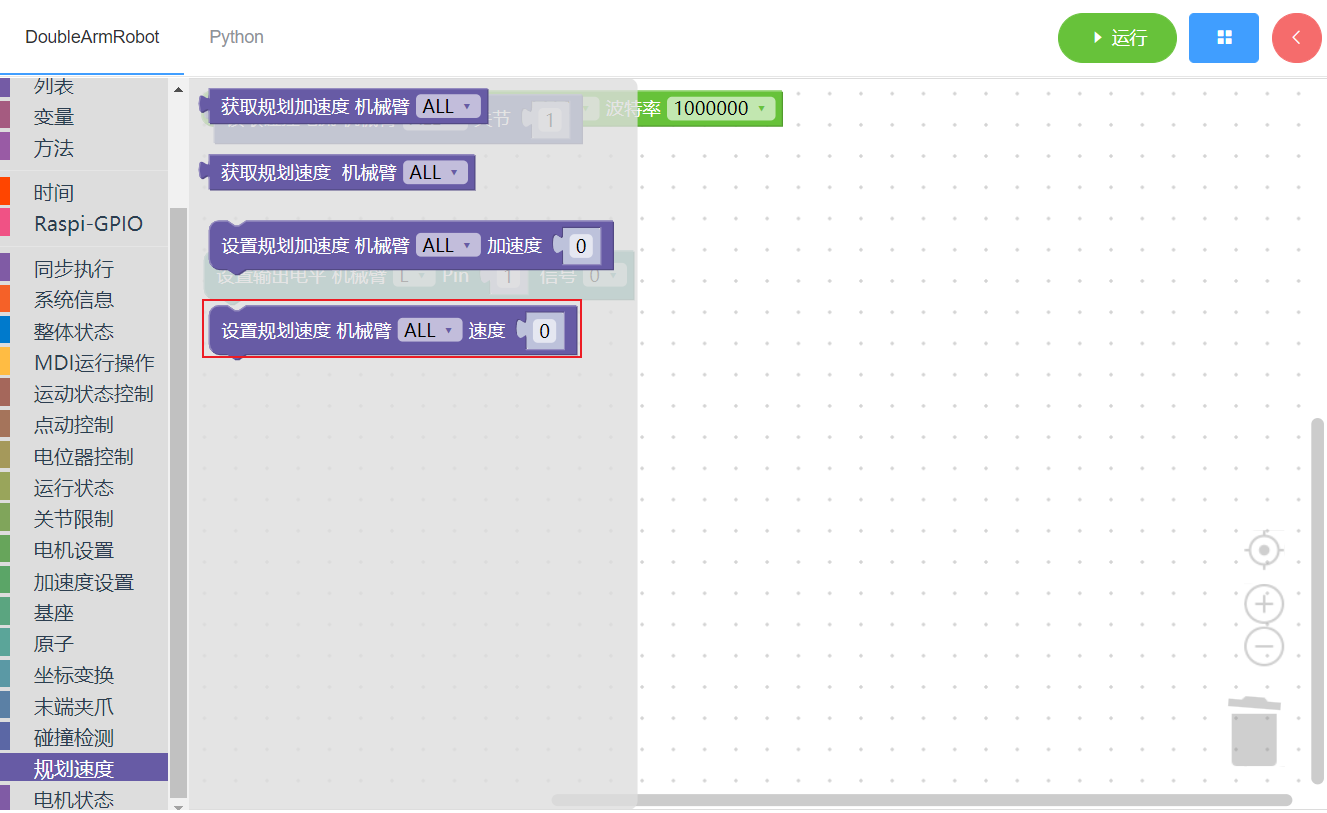
3.16.4 设置规划速度
1. API说明
- 功能:设置规划速度
- 参数:
ID(ALL/L/R/W):ALL对应全部,L对应左臂,R对应右臂,W对应腰部SPEED:规划速度(0~100)
- 返回值 :无
2.积木块展示
3.17 电机状态
3.17.1 获取关节电流
1. API说明
- 功能:获取关节电流
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部
- 返回值 :
CURRENTS:关节电流
2.积木块展示

3.17.2 获取关节状态
1. API说明
- 功能:获取关节状态
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部
- 返回值 :
LIST:列表(包含电压、传感器、温度、电流、角度、过载,数值为0表示无误差)
2.积木块展示
3.17.3 获取关节电压
1. API说明
- 功能:获取关节电压
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部
- 返回值 :
VOLTS:电压(小于24V)
2.积木块展示

3.17.4 获取关节温度
1. API说明
- 功能:获取关节温度
- 参数:
ID(L/R/W):L对应左臂,R对应右臂,W对应腰部
- 返回值 :
TEMPERATURE:温度
2.积木块展示
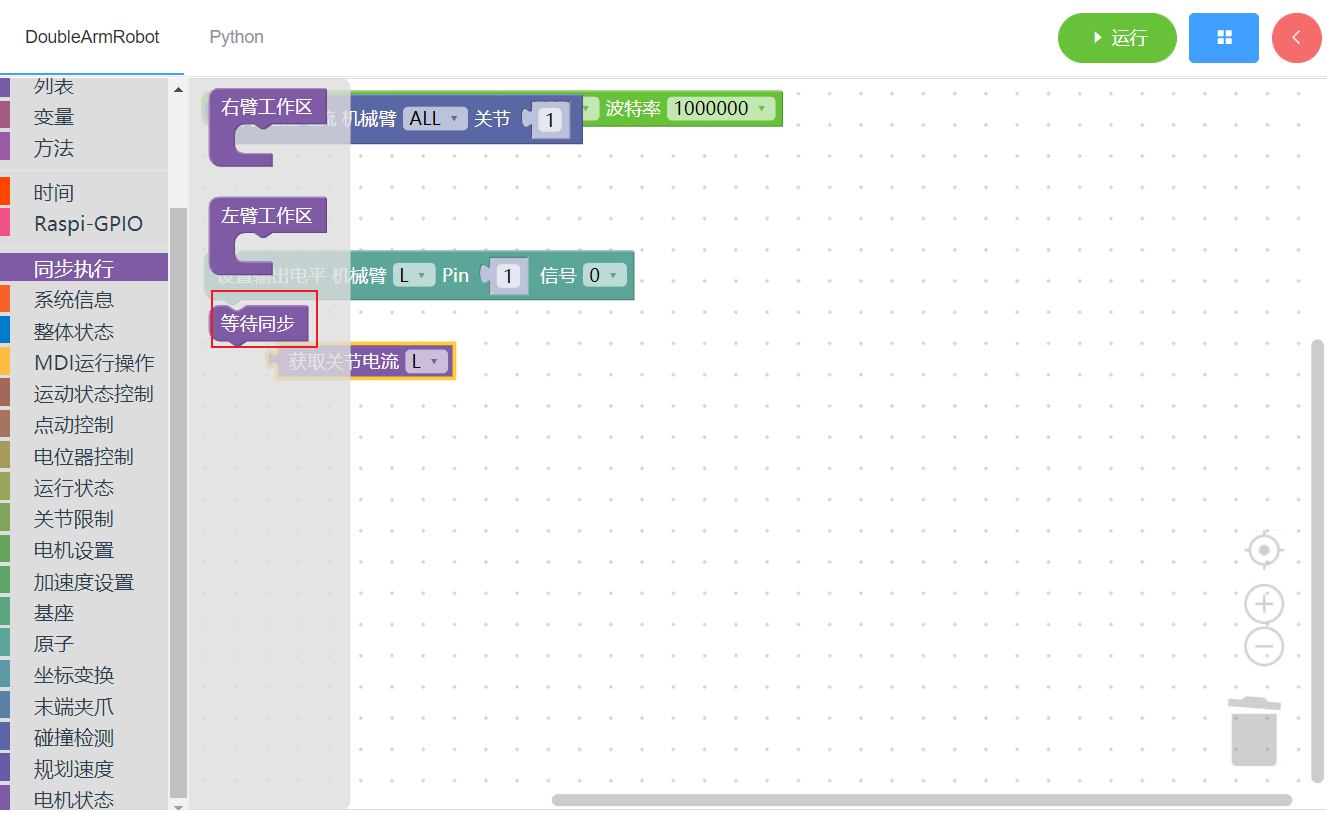
3.18 同步执行
3.18.1 右臂工作区
1. API说明
- 功能:同步使用机械臂,同步执行时需要将左右臂积木块拖拽到工作区,保证两个机械臂同时运动
- 参数:无
- 返回值 :无
2.积木块展示
3.18.2 左臂工作区
1. API说明
- 功能:同步使用机械臂,同步执行时需要将左右臂积木块拖拽到工作区,保证两个机械臂同时运动
- 参数:无
- 返回值 :无
2.积木块展示
3.18.3 同步点
1. API说明
- 功能:只能用于左右臂工作区内部,仅同步运行双臂时生效,使用同步点可以让机械臂在规定的条件下停下来等待另一个机械臂执行完毕后再执行后续操作
- 参数:无
- 返回值 :无
2.积木块展示