myAGV

1 产品简介
myAGV 大象首款移动机器人,采用竞赛级麦克纳姆轮,全包裹金属车架;ROS开发平台内置两种slam算法,满足建图、导航方向的学习;提供丰富的扩展接口,可搭载my系列机械臂,实现移动抓取,完成更多应用。
2 产品性能
全向移动
- 竞赛级麦克纳姆轮,全包裹金属车架,分体式结构可拆卸。
SLAM激光雷达
- ROS开发平台内置gmapping、cartographer两种算法,激光雷达实时建图扫描,自动规划路径进行避障导航。
内置摄像头
- 500W高清摄像头可进行物体识别与精准定位。
额外扩展
- 车身双侧弹仓,扩展电池增加续航时间;扩展吸泵与机械臂搭配,实现更多应用。
载物机器人
- 不同尺寸物料盒任意选择,载物运输解放双手。
复合机器人
- 可搭载my系列机械臂,实现移动抓取扩展工作空间,完成更多任务。
多种玩法
- ps手柄控制支持多机协同,多台机器人实时运动。
3 产品参数
| 指标 | 参数 |
|---|---|
| 名称 | myAGV |
| 尺寸 | 311x236x130mm |
| 重量 | 3.6kg |
| 最大承重 | 2kg |
| 续航时长 | 1~1.5小时 |
| 待机时长 | 1.5~2小时 |
| 充电时长 | 3.5~4小时 |
| 充电电压 | 12V,2A |
| 轮胎类型 | 麦克纳姆轮 |
| 电机类型 | 霍尔编码器电机 |
| 最大移动速度 | 0.9m/s |
| 激光雷达 | 360°全向雷达 |
| 识别范围 | 8m |
| 内置控制器 | 树莓派4B 2GB |
| 内置摄像头 | 500W像素 |
4 产品接口
myAGV 接口介绍

图1-1 myAGV接口
① 机械臂供电接口
② IO接口组
③ HDMI接口
④ USB 2.0 接口
⑤ 网络接口
⑥ 电源开关按钮
⑦ 电源充电接口
myAGV 接口说明
A. 机械臂供电接口:香蕉插头母头,型号为XT30UPB-F,给my系列机械臂进行供电(12V 5A)。
B. IO接口组:接口均为2.54mm杜邦接口,外部可使用2.54mm杜邦线,接口定义如下表
| 标签名 | 信号名 | 功能 | 备注 |
|---|---|---|---|
| 7 | G7 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 8 | G8 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 25 | G25 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 24 | G24 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 23 | G23 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 18 | G18 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| G | GND | 主板电源信号地 | |
| 11 | G11 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 9 | G9 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 10 | G10 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 22 | G22 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 27 | G27 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 17 | G17 | 3.3V-OUT-PNP输出/3.3V-INT输入 | |
| 3V3 | 3V3 | 3.3V电源 |
表1-1 IO接口组说明
C.HDMI接口:该接口为HDMI D型接口(如图1-2所示),用于连接显示器。
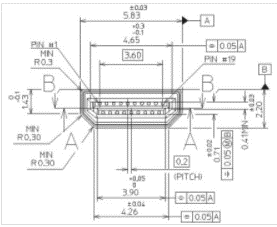
图1-2 HDMI D型接口
D.USB 2.0 接口:以串口总线标准2.0进行数据连接的接口;用户可以使用USB接口拷贝程序文件,也可以使用USB接口连接鼠标、键盘等外设。
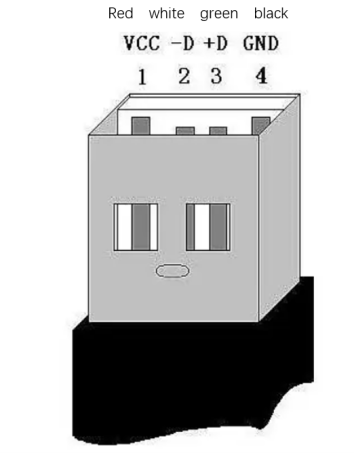
图1-3 USB接口定义图
E.网络接口:网络数据连接的端口,用户使用网络接口可以用于PC端与机器人系统的通信交互,也可以用于与其他设备进行以太网通信。
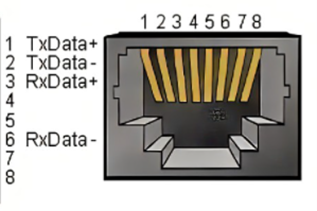
图1-4 网络接口定义图
F.电源开关按钮:按压下去即为开启myAGV。
G.电源充电接口:使用DC 2.5*5.5电源口;可使用厂家配备的12V2A DC电源适配器给myAGV进行充电。