硬件问题
1 关于结构
Q:机械臂抖动的问题如何解决?
- A:进入mystudio,对机械臂的ATOM烧录最新版本的atommain固件。
然后更新pymycobot版本(Win+R输入cmd即可打开终 端),使用pip对pymycobot进行更新。
(此处输入pip install pymycobot --upgrade --user然后按回车运行)。
最后在github中找到pid_read_write.py文件,下载保存到您的电脑或者树莓派系统中。
按照代码中的提示修改对应舵机号的每一个参数配置。参数序号与图片展示的序号一一对应,修改后运行即可。
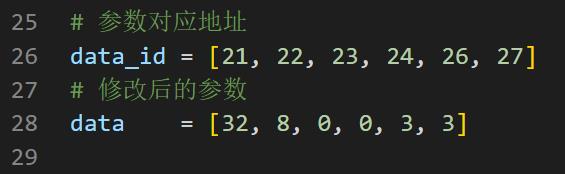

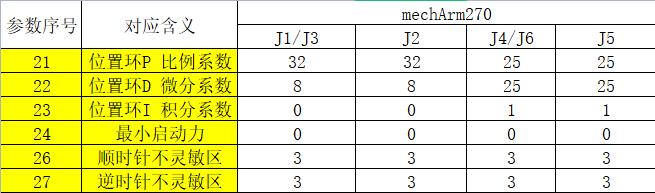
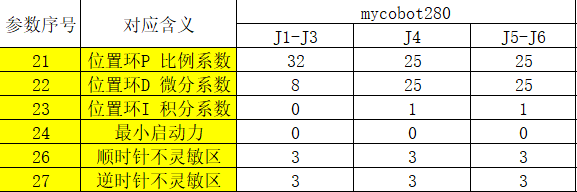

需要注意的是:每一款机械臂的的所有关节参数不是统一的,需要按照下图对应的机械臂型号做对照和修改。
pid_read_write.py文件对应github链接:https://github.com/elephantrobotics/pymycobot/tree/main/demo
Q: myCobot的关节的限位?
A: 一轴和五轴有限位,一轴顺时针约160°左右,逆时针160°左右。五轴可时针、逆时针可转动约160°
注意:转动机械臂时应小角度、轻轻地转动,到达限位后就不可用力继续转动。
Q:六个舵机是由什么控制的?
- A:舵机是由顶部的atom来进行控制的。
Q:atom在机械臂中的作用是什么?
- A:atom在机械臂中主要进行机械臂的运动学算法控制:包括了正逆运动学,选解,加减速,速度同步,多次方插补,坐标转换等,需要的实时控制与多线程等。atom的相关程序暂不开源。
Q:基于微处理器的机械臂连接HDMI接口但显示屏无显示是为什么?是否需要下载串口驱动?
- A: 检查接线是否正确,电源开关是否开启。尝试更换HDMI接口,机械臂上有两个HDMI接口。接口部分要用力插稳。不需要下载串口驱动。
- 还有另外一种情况就是您可能先给机械臂通了电然后再连接的HDMI线。这样也会导致显示器没有输入信号。您需要在机械臂不通电的情况下先将HDMI线完全连接好,然后再连接适配器(或者已经连接好适配器后拨动开关开机)。
Q:不同版本的机械臂支持什么通信接口?
- A:基于微处理器的机械臂支持socket通信TCP;基于微控制器的机械臂可以USB转串口通信。
Q:电机使用过程中自动断电,是为什么?
- A:使用时间较长电机过热保护。此现象是正常现象,等待几分钟后即可继续使用。
Q:机械臂是否支持安卓开发?
- A:我们暂时并没有直接的安卓开发环境,需要自己开发,我们提供串口协议,串口可以二次开发。
Q:树莓派自带的USB接口有什么作用?
- A:树莓派4B自带USB插口,可以给树莓派供电,暂时无其他特别作用,不能作为通讯接口连接到笔记本电脑或者PC主机进行通讯。
2 关于参数
Q: 机械臂的速度单位是什么?
- A: 运行速度180度/秒。
Q:mycobot280-M5通讯频率是多少呢?
- A:10-20Hz。
3 关于末端夹持器
Q: 自适应夹爪是不能完全闭合吗?
- A:夹爪本身是会有一定间隙存在,不是完全闭合的,您可以通过增加之间的垫片厚度调节。
Q:mycobot280自适应夹爪是什么通讯?
- A:mycobot280自适应夹爪是ttl通讯。
Q:mycobot320末端提供什么通讯?
- A:mycobot320末端提供485通讯接口。
Q:如何将USB摄像头固定在机械臂末端呢?
- A:需要使用法兰固定,可以自主进行购买。