夹爪控制
夹爪安装:
自适应夹爪将夹爪插在atom上面的引脚上,具体看下图:

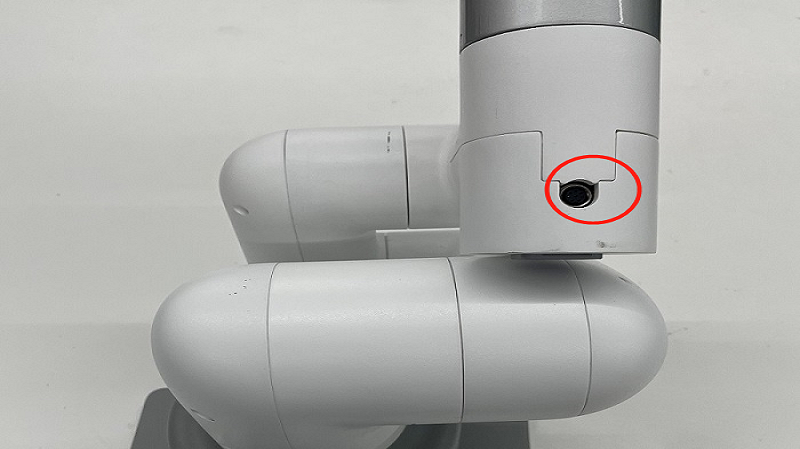
电动夹爪插在顶端上的485接口处,具体看下图:
注意:myCobot 280-m5无电动夹爪,只有myCobot 320-m5有电动夹爪。
1 自适应夹爪控制
支持设备:myCobot280、320&&myPalletizer 260
SetGriper(int open)
返回值:无
参数说明:夹爪开关状态(0--关,1--开)
案例:由于延迟,第一次控制夹爪,可能不成功,建议发送两次for (int i = 0; i < 2; i++) {
mycobot::MyCobot::I().SetGriper(1);<br> mycobot::MyCobot::I().SleepSecond(3);<br> mycobot::MyCobot::I().SetGriper(0);<br> mycobot::MyCobot::I().SleepSecond(3);<br>}
2 电动夹爪控制
支持设备:myCobot320
SetElectricGriper(int open)
返回值:无
参数说明:夹爪开关状态(0--关,1--开)
案例:由于延迟,第一次控制夹爪,可能不成功,建议发送两次
for (int i = 0; i < 2; i++) {<br>
mycobot::MyCobot::I().SetElectricGriper(1);<br>
mycobot::MyCobot::I().SleepSecond(1);<br>
mycobot::MyCobot::I().SetElectricGriper(0);<br>
mycobot::MyCobot::I().SleepSecond(1);<br>
}
3 完整使用案例
int main(int argc, char* argv[])
try {
QCoreApplication a(argc, argv);
using namespace std::chrono_literals;
if (!mycobot::MyCobot::I().IsControllerConnected()) {
std::cerr << "Robot is not connected\n";
exit(EXIT_FAILURE);
}
std::cout << "Robot is connected\n";
mycobot::MyCobot::I().PowerOn();
mycobot::MyCobot::I().SleepSecond(1);//需要等待1S,让前面的动作做完
//设置io输出,2、5、26为m5输出引脚
mycobot::MyCobot::I().SetBasicOut(2, 1);
mycobot::MyCobot::I().SleepSecond(1);
mycobot::MyCobot::I().SetBasicOut(5, 1);
mycobot::MyCobot::I().SleepSecond(1);
mycobot::MyCobot::I().SetBasicOut(26, 1);
mycobot::MyCobot::I().SleepSecond(1);
//m5输入引脚 35、36 第一次会出现延迟
/*for (int i = 0; i < 2; i++) {
std::cout << "35= " << mycobot::MyCobot::I().GetBasicIn(35) << std::endl;
mycobot::MyCobot::I().SleepSecond(1);
std::cout << "36= " << mycobot::MyCobot::I().GetBasicIn(36) << std::endl;
mycobot::MyCobot::I().SleepSecond(1);
}*/
//atom输出引脚 23 33
/*mycobot::MyCobot::I().SetDigitalOut(23, 1);
mycobot::MyCobot::I().SleepSecond(1);
mycobot::MyCobot::I().SetDigitalOut(33, 1);
mycobot::MyCobot::I().SleepSecond(1);*/
//atom输入引脚22 19 第一次会出现延迟
/*for (int i = 0; i < 2; i++) {
std::cout << "22= " << mycobot::MyCobot::I().GetDigitalIn(22) << std::endl;
mycobot::MyCobot::I().SleepSecond(1);
std::cout << "19= " << mycobot::MyCobot::I().GetDigitalIn(19) << std::endl;
mycobot::MyCobot::I().SleepSecond(1);
}*/
//自适应夹爪 1--open 0--close 由于第一次有延迟,发送两次
for (int i = 0; i < 2; i++) {
mycobot::MyCobot::I().SetGriper(1);
mycobot::MyCobot::I().SleepSecond(3);
mycobot::MyCobot::I().SetGriper(0);
mycobot::MyCobot::I().SleepSecond(3);
}
//电动夹爪 1-开 0-关 由于第一次有延迟,发送两次
/*for (int i = 0; i < 2; i++) {
mycobot::MyCobot::I().SetElectricGriper(1);
mycobot::MyCobot::I().SleepSecond(1);
mycobot::MyCobot::I().SetElectricGriper(0);
mycobot::MyCobot::I().SleepSecond(1);
}*/
/*mycobot::MyCobot::I().StopRobot();
std::cout << "Robot is moving: " << mycobot::MyCobot::I().IsMoving() << "\n";
mycobot::Angles angles = mycobot::MyCobot::I().GetAngles();
std::this_thread::sleep_for(200ms);
mycobot::Coords coords = mycobot::MyCobot::I().GetCoords();
angles = mycobot::MyCobot::I().GetAngles();
std::cout << "[" << angles[mycobot::J1] << ", " << angles[mycobot::J2] << ", " << angles[mycobot::J3] << ", "
<< angles[mycobot::J4] << ", " << angles[mycobot::J5] << ", " << angles[mycobot::J6] << "]";
mycobot::Angles goal_angles = { 1, 0, 0, 0, 0, 0 };
mycobot::MyCobot::I().WriteAngles(goal_angles,180);
while (!mycobot::MyCobot::I().IsInPosition(goal_angles, false)) {
angles = mycobot::MyCobot::I().GetAngles();
std::cout << "[" << angles[mycobot::J1] << ", " << angles[mycobot::J2] << ", "
<< angles[mycobot::J3] << ", " << angles[mycobot::J4] << ", "
<< angles[mycobot::J5] << ", " << angles[mycobot::J6] << "]" << std::flush;
std::this_thread::sleep_for(200ms);
}
//mycobot::MyCobot::I().JogAngle(mycobot::Joint::J1, 1, 5);
std::this_thread::sleep_for(5000ms);
mycobot::MyCobot::I().StopRobot();*/
std::cout << "\n";
exit(EXIT_SUCCESS);
} catch (std::error_code&) {
std::cerr << "System error. Exiting.\n";
exit(EXIT_FAILURE);
} catch (...) {
std::cerr << "Unknown exception thrown. Exiting.\n";
exit(EXIT_FAILURE);
}