工作环境搭建
首先,需要明确的是所有案例实验都是基于python+opencv+pymycobot实现的,所以使用M5的机械臂时需要使用Mystudio在机械臂头部和底部分别烧入ATOM固件和M5Stack-basic固件。由于要求4.5.3版本的OpenCV在Linux系统中安装较为麻烦,同时为了降低环境搭建难度,我们将给出 Linux系统镜像(Ubuntu 16.04)、Virtual Box安装包以及其扩展包。 接下来将教导大家如安装Virtual Box以及导入Linux系统镜像(默认密码为123)。
若您的机械臂是树莓派版本的,请直接从 2 知识准备 章节查看即可,树莓派版本的机械臂不需要安装虚拟机。 M5版本的机器在搭建虚拟环境时需要您的电脑系统最低为Windows 10。
1 Virtual Box安装
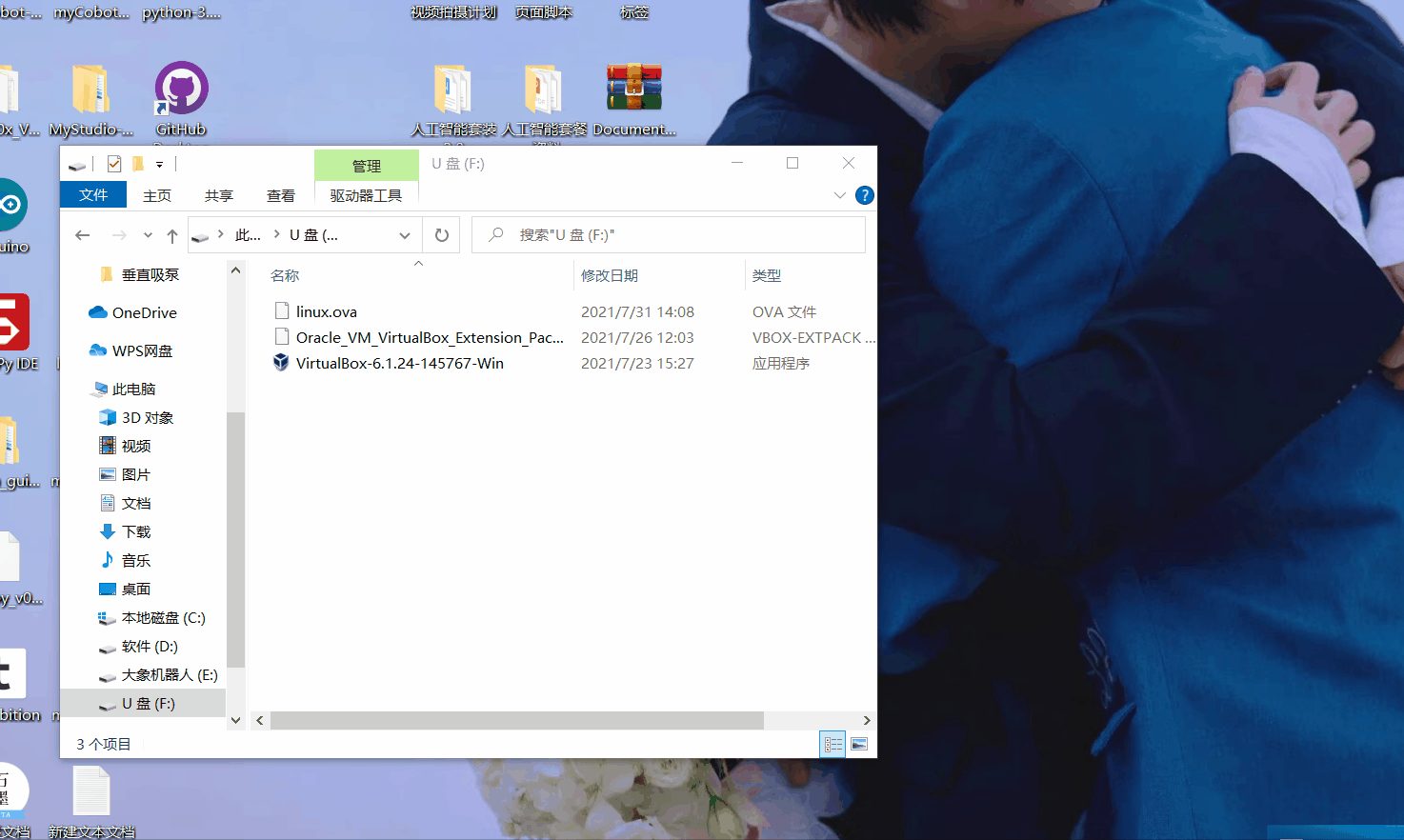
点击链接下载安装包:
打开VirtualBox-6.1.24-145767-Win.exe安装程序,按照提示完成安装
2 安装Virtual Box的扩展
打开安装好的Virtual Box,打开Oracle_VM_VirtualBox_Extension_Pack-6.1.24.vbox-extpack扩展程序,如下安装即可。
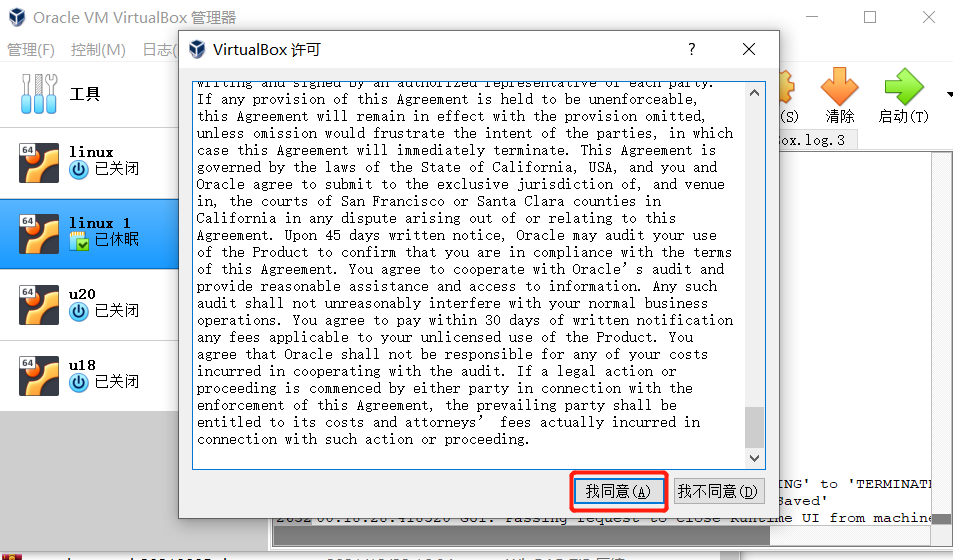
注意:若您点击 "我同意" 没有反应,请按下图顺序查看是否安装成功,若按照图片上显示序号3的字样,则是安装成功,安装成功但还没有提示的话,以管理员权限运行。

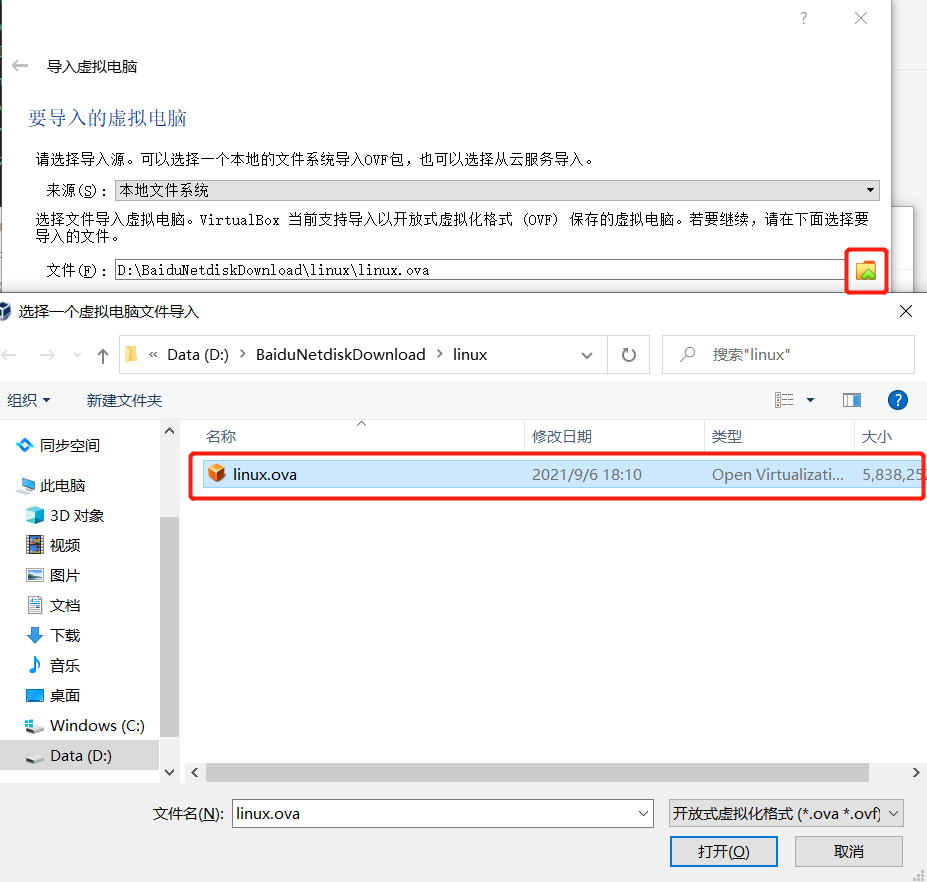
3 导入Linux系统镜像
在Virtual Box界面中点击 管理 -> 导入虚拟电脑 -> 选择虚拟镜像 -> 选择安装路径并进行导入,如下安装即可。
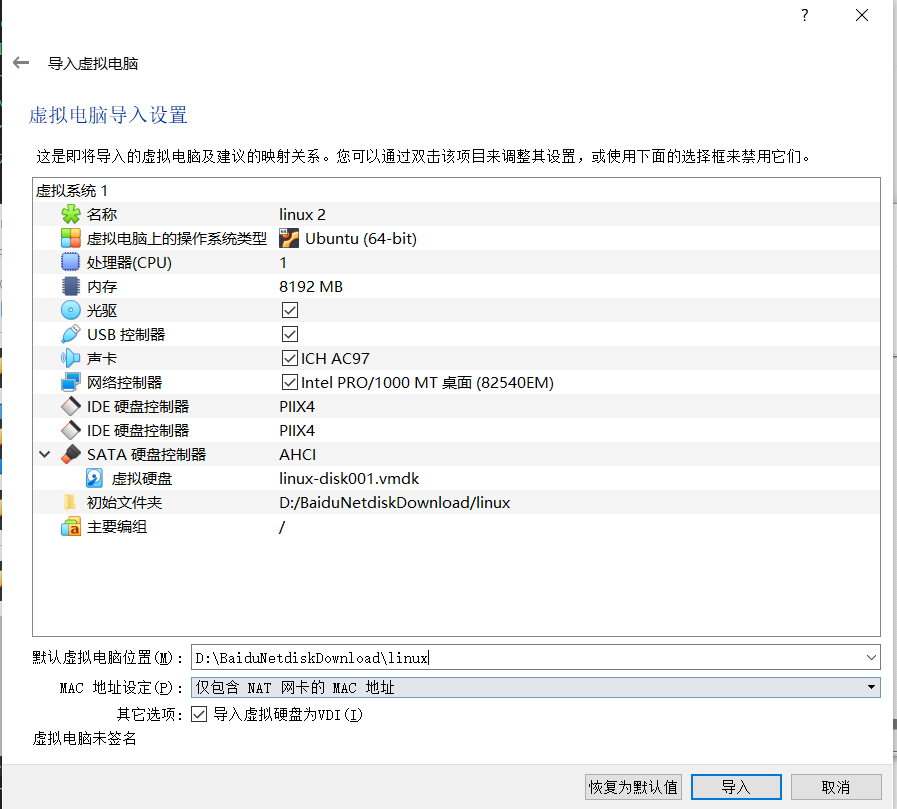
等待镜像导入即可,如下图即为安装成功。

4 人工智能套装搭建
您可以通过 人工智能套装--安装教程 按照视频内容进行人工智能套装的搭建
首先,请先确认物品是否齐全以及是否有损坏,若出现问题,请联系我们。 邮箱: support@elephantrobotics.com 我们会在1~2个工作日内回复。 微信: 我们只对已经购买过产品的用户进行微信1对1服务。

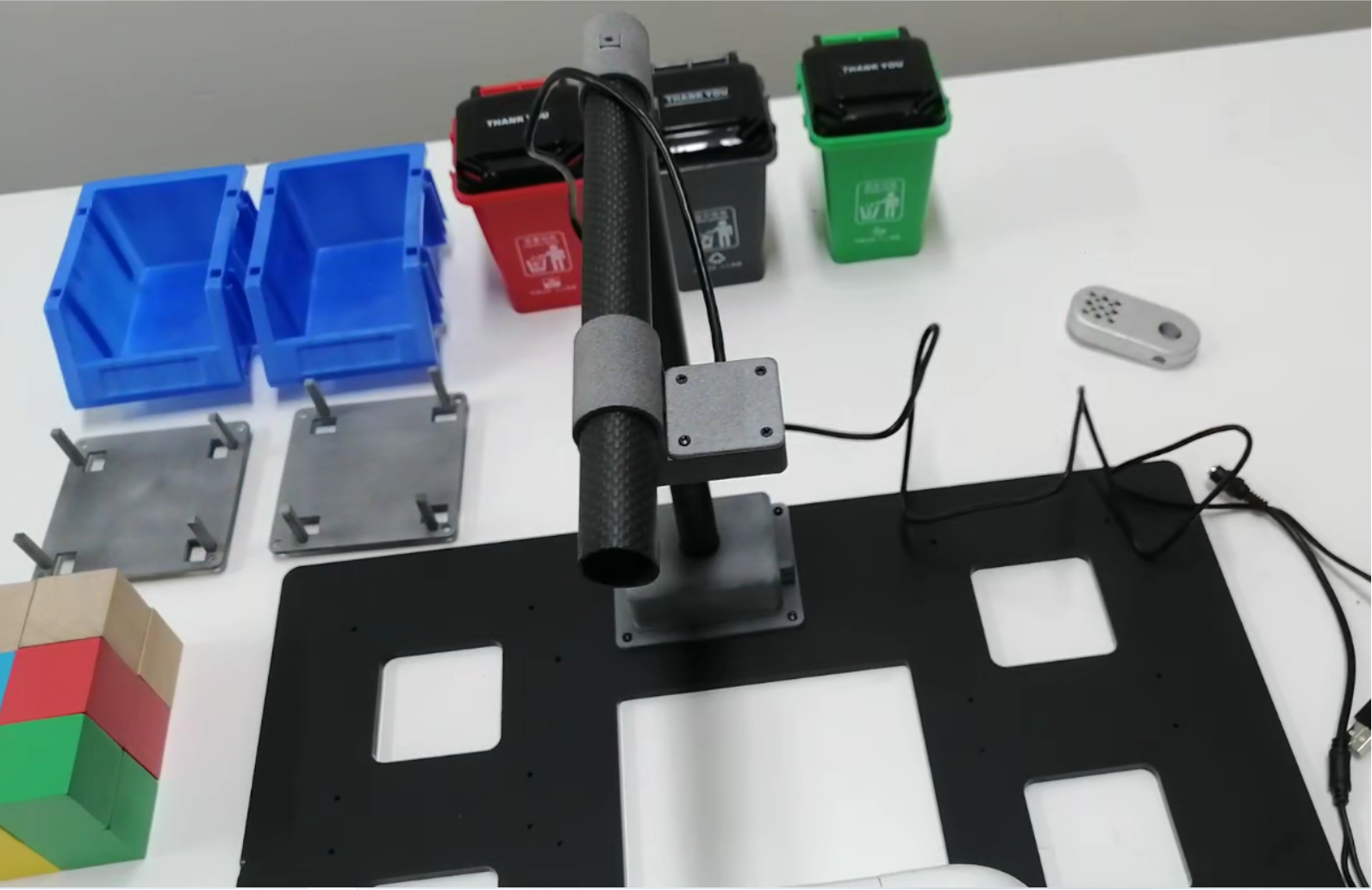
- 物料盒
- 垃圾桶
- 人工智能套装_底板
- 物料盒支架
- 方块(提供贴纸)
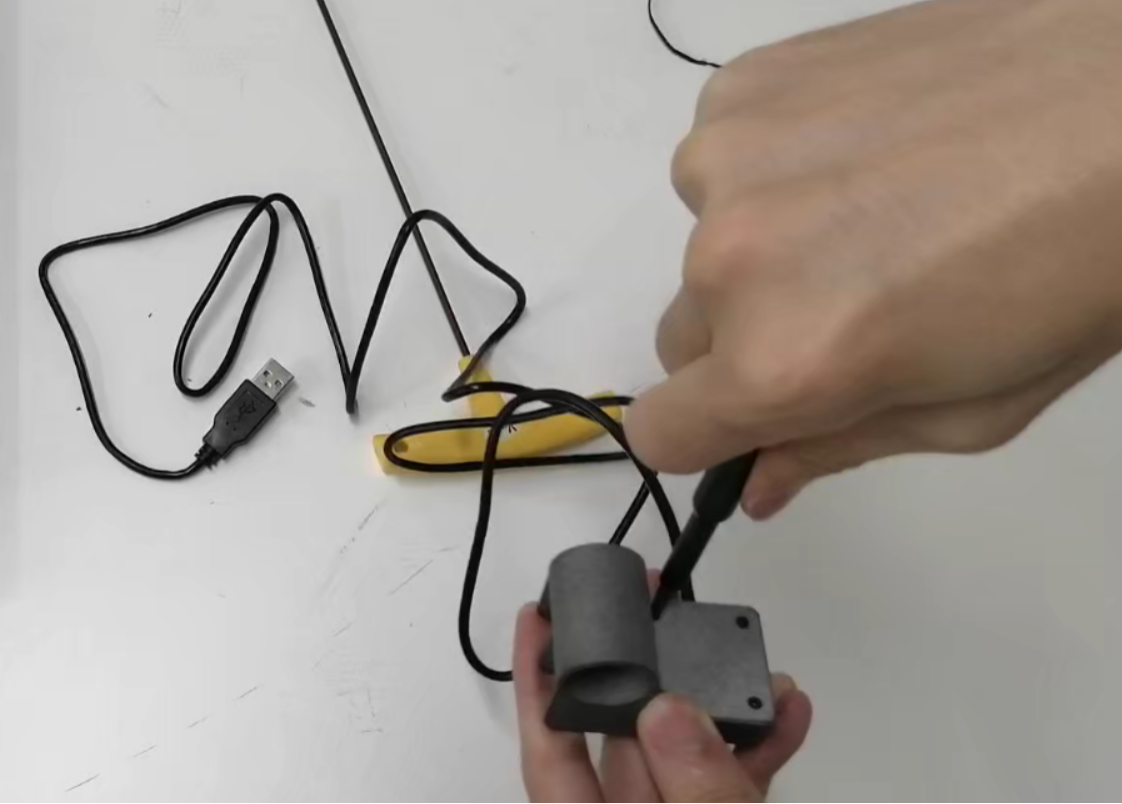
- 吸泵
- 视觉模块_底座支架
- 视觉模块_摄像头
- 视觉模块_摄像头法兰
- 视觉模块_摄像头支架
- 视觉模块_纤维管
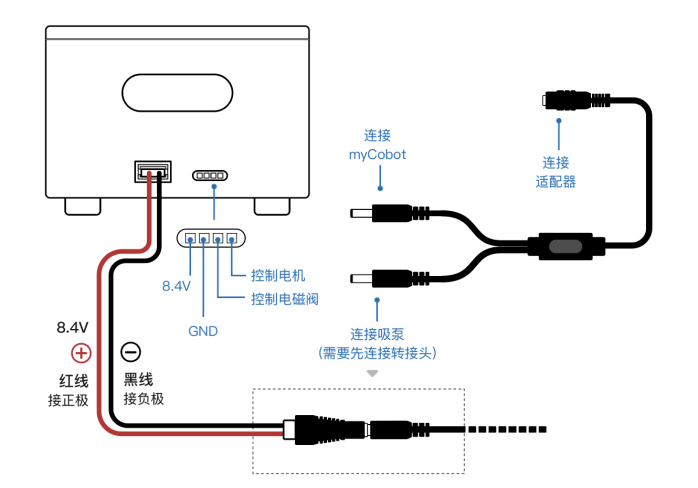
- 吸泵连接线_电源分线
- 吸泵连接线_电源线
- 吸泵连接线_杜邦线
第一步:安装机械臂 1 首先将机械臂的基座用螺丝固定好。
2 在机械臂底部乐高孔内,插入适量乐高科技件,将机械臂嵌入基座即可。
第二步:安装吸泵 1 母头线--电源线端连接吸泵左边的端口,另一端连接一入两出线出口端,另外出口端连接机械臂电源口,入口端连接电源适配器。
2 杜邦线的插针端连接(接线示意图)注释的控制电机和电磁阀的接口,另一端连接机械臂20、21引脚。

3 使用乐高科技件将吸泵头固定在机械臂末端。
第三步:安装视觉模块
1 eye in hand
1.1 将摄像头嵌入在摄像头法兰,之后安装盖子。

1.2 卸下机械臂六轴末端。

1.3 安装摄像头法兰,用螺丝固定。
1.4 吸泵通过乐高键插在摄像头法兰上。

1.5 亚克力板未贴二维码的面嵌入底板即可。
2 eye to hand
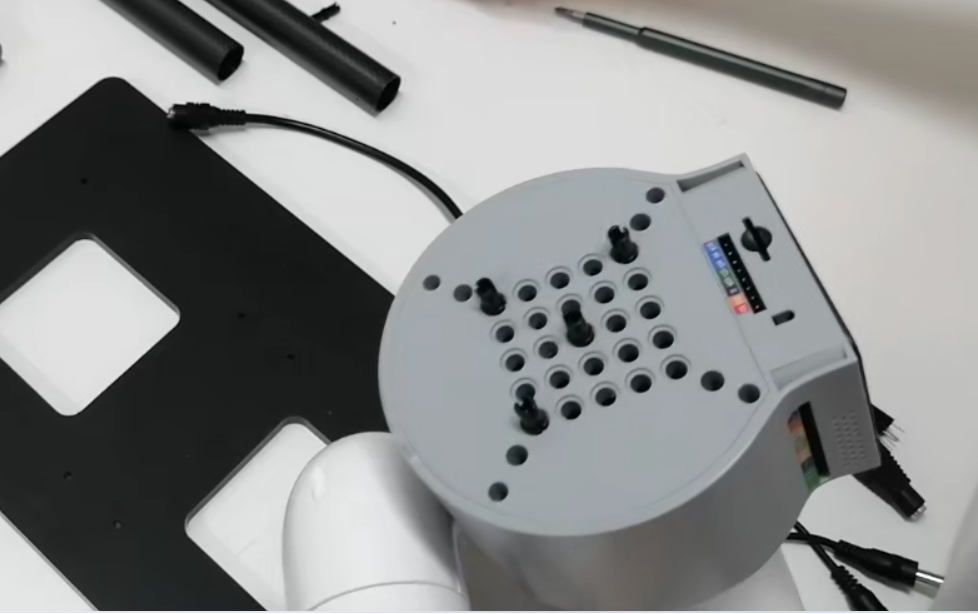
2.1 将视觉模块底座,通过螺丝固定在底板上。

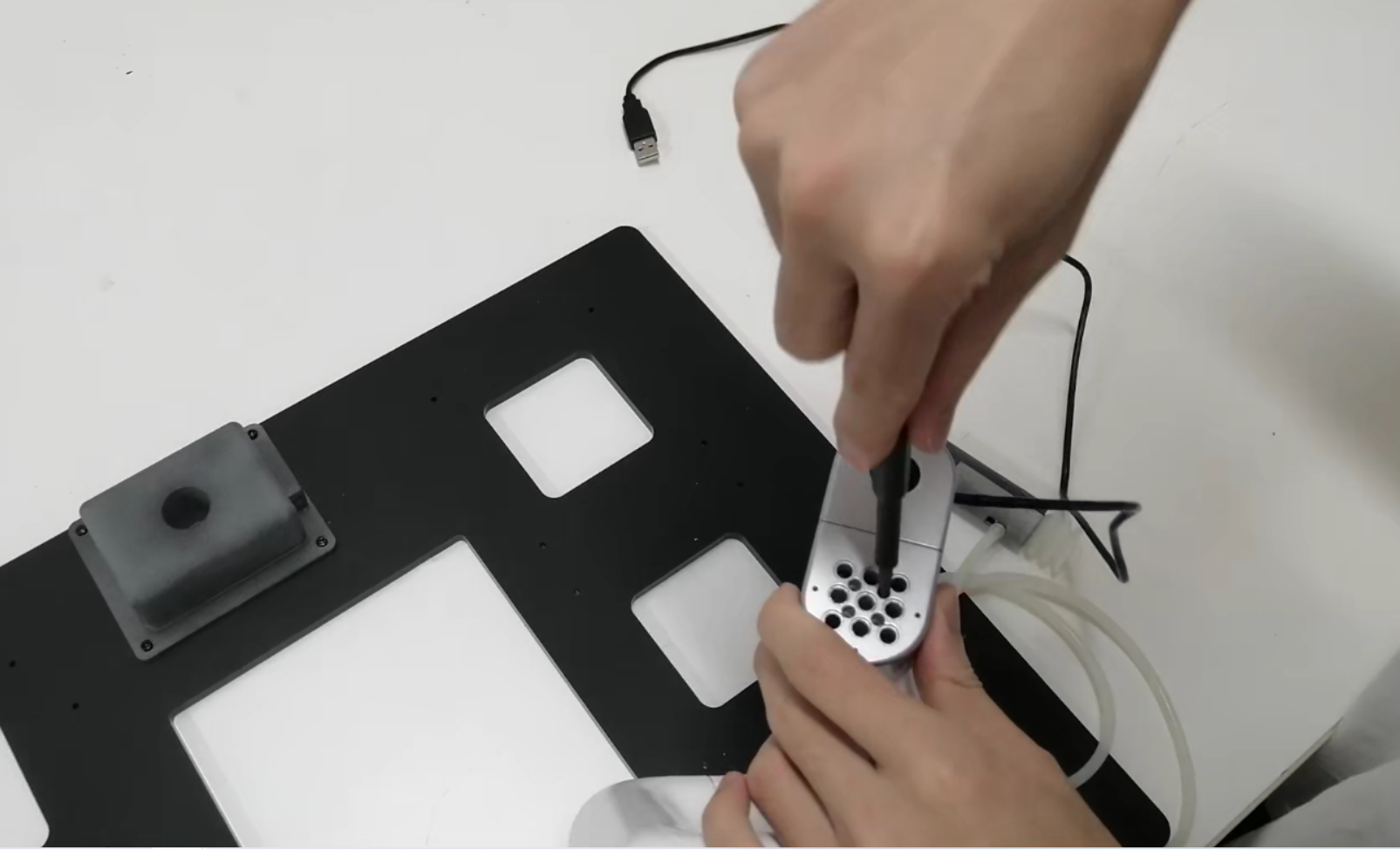
2.2 将摄像头安装在摄像头支架上,使用螺丝固定。
2.3 将两个纤维管插入转接头,后安装在视觉模块底座。 2.4 将摄像头支架接在纤维管,另一端USB口连接电脑。
2.5 吸泵通过乐高键插在机械臂六轴末端。 2.6 亚克力板按照图示贴好小尺寸二维码。
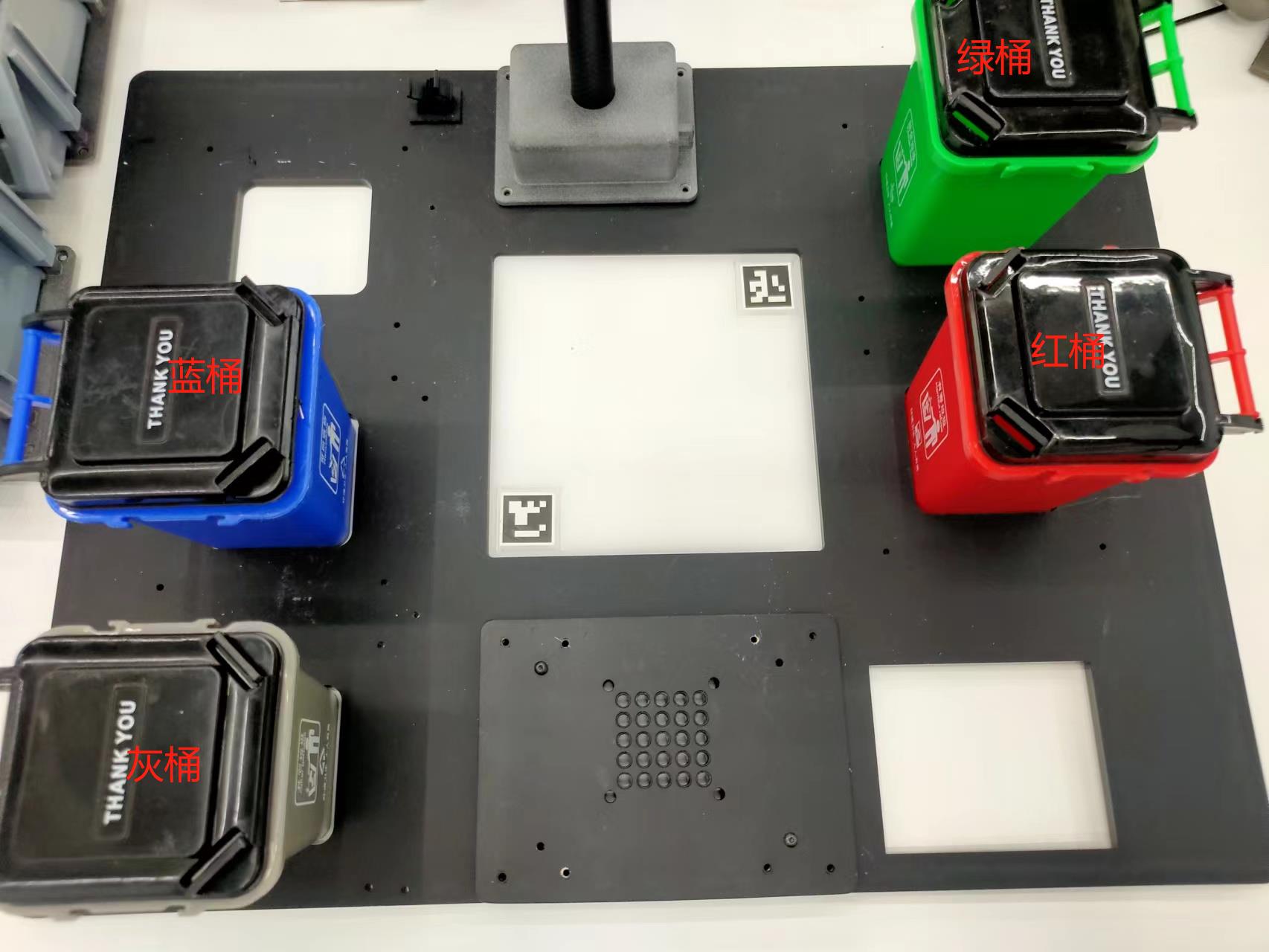
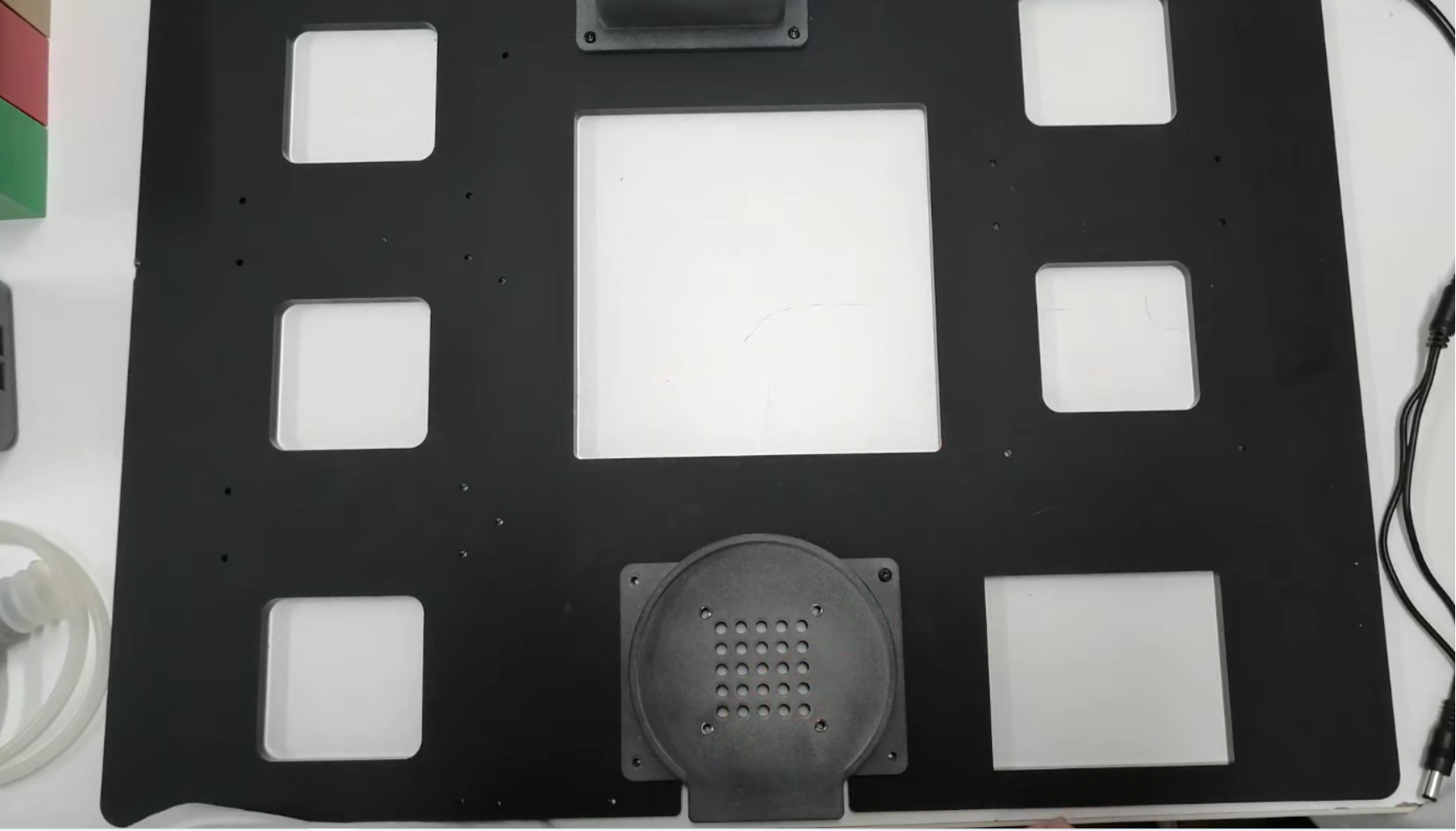
第四步:摆放物料
1 将物料架和底座拼好,放入对应的凹槽,使用螺丝固定。

2 将物块放进物料架。 3 最后摆放好垃圾桶即可。