myAGV-复合机器人
myAGV 现在支持搭载 myCobot 280 M5/Pi、myPalletizer 260 M5/Pi、mechArm 270 M5/Pi 三款机械臂,myAGV 可以通过USB串口或无线控制机械臂,实现移动抓取扩展工作空间,完成更多任务。
1 安装说明
1.1 安装机械臂
首先需要将机械臂安装到myAGV,可使用乐高键或螺丝将机械臂安装在myAGV上部的位置,可以根据自己需求安装在前部或后部。

1.2 连接机械臂
使用DC电源线连接到机械臂供电接口,另一端连接机械臂电源接口,小车可以给机械臂供电(12V 5A)。

举例:myPalletizer 260 Pi,其他Pi机械臂同理。
2 myAGV与机械臂通讯控制
2.1 M5 版本
2.1.1 USB串口通讯控制
注: 只支持myCobot 280 M5、myPalletizer 260 M5、mechArm 270 M5
此部分以myPalletizer 260 M5版本举例说明。
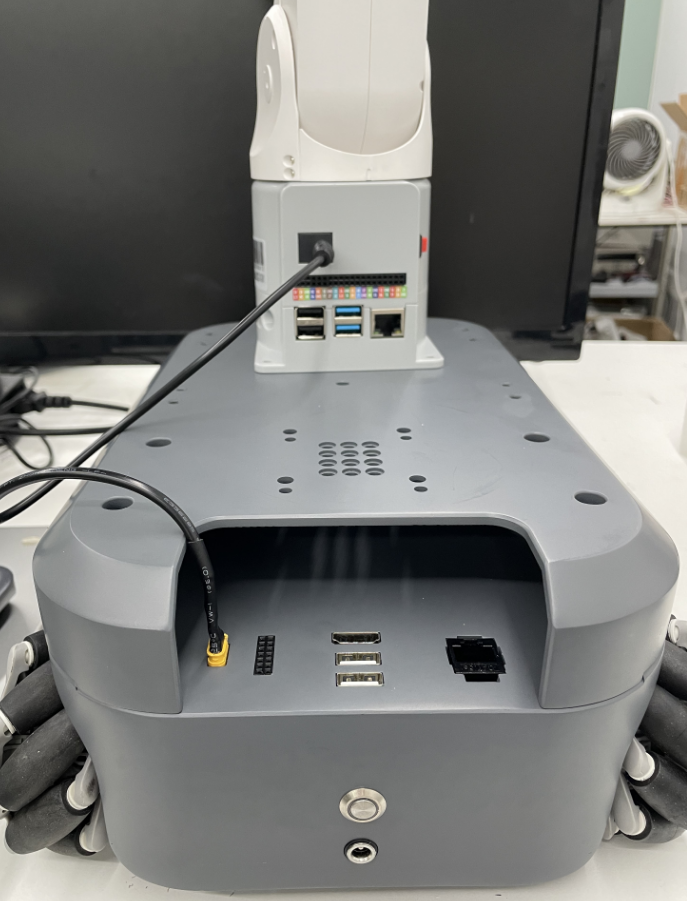
1、连接机械臂
使用usb串口通讯控制时,首先使用type-c转usb的线连接小车与机械臂。
2、USB通讯连接
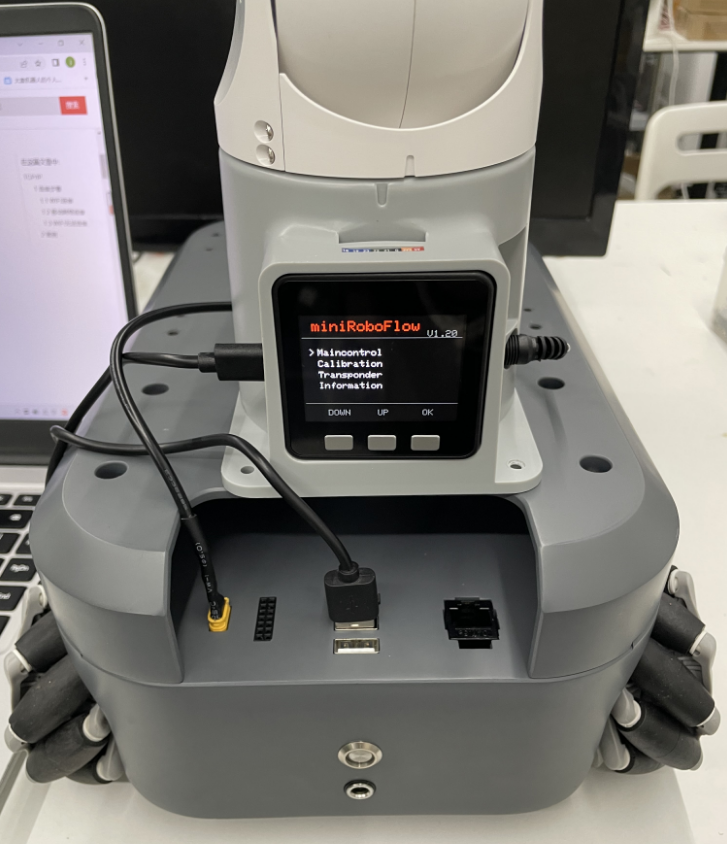
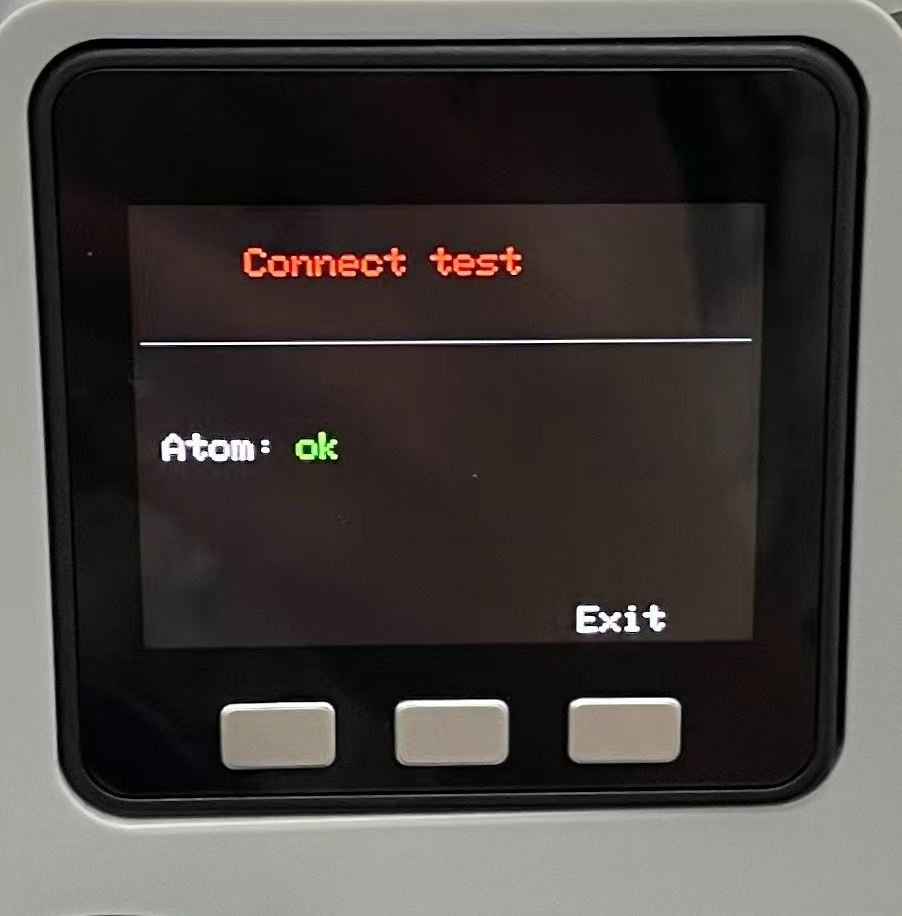
点击 Transponder,再点击 USB UART,机械臂保持在Atom: ok界面。

3、myAGV通讯控制
小车正常开机连接显示屏与键鼠,以上步骤确保连接好,接下来就可以使用小车控制机械臂啦。
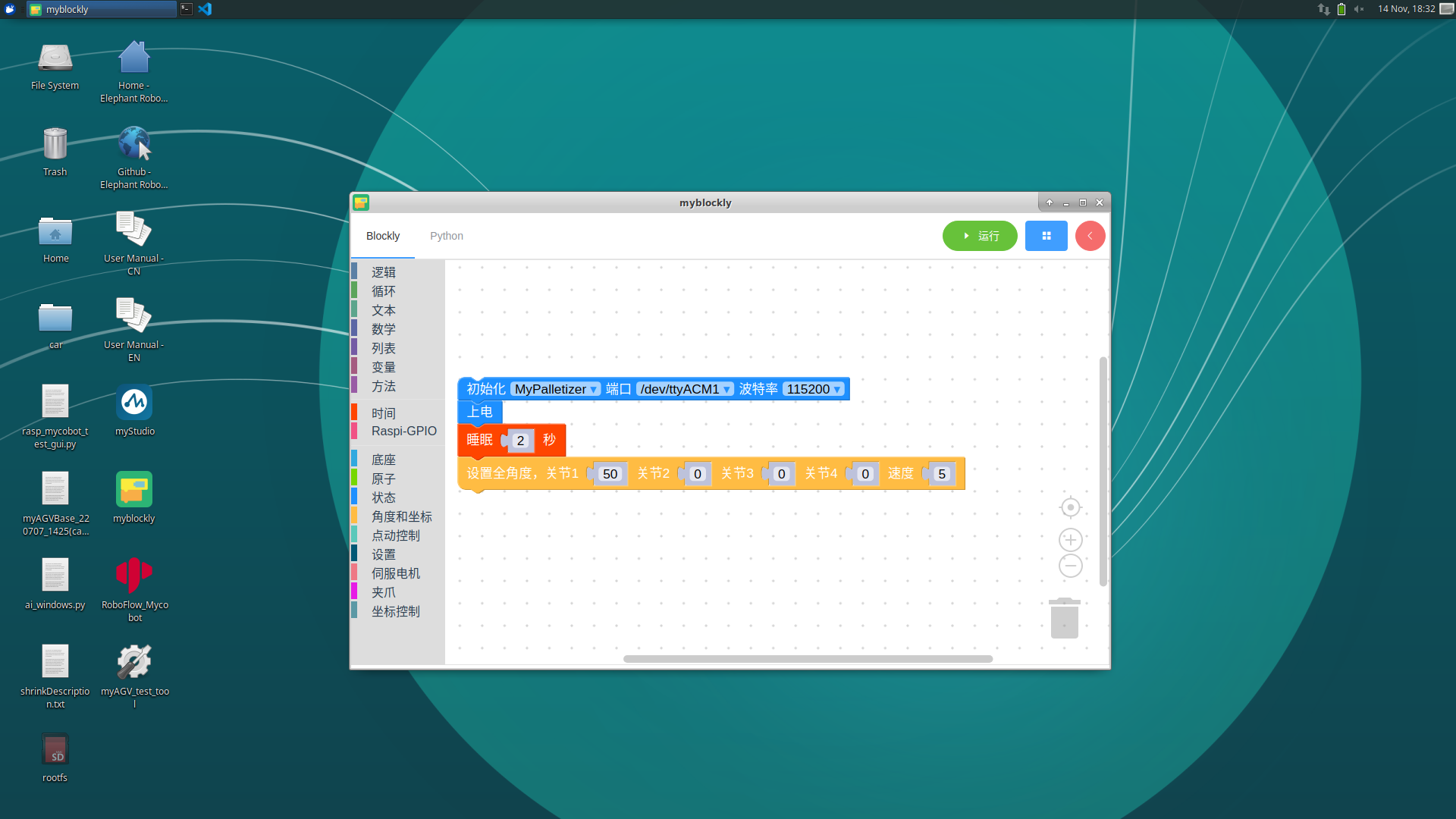
更加详细的 myBlockly教程,可查看 6.1章节 myBlockly
2.1.2 WIFI 通讯控制
注: 只支持myCobot 280 M5、myPalletizer 260 M5
1、 移动网络设定
Step 1: 需要把wifi或手机移动热点修改为与机械臂网络一致:
即“MyCobotWiFi2.4G”,机械臂移动网络密码为“mycobot123”;
即“MyPalWiFi2.4G”,机械臂移动网络密码为“mypal123”。
2、WIFI连接
Step 1: 点击 WlAN Server,出现“WIFI Connecting”提示,表示无线网络正在连接。

Step 2: 出现WIFI Connected以及IP和Port信息说明WIFI已经成功连接。

注意:如果连接失败请返回到USB UART选项点击一次再试。若依旧无法连接WIFI,请查看第8章节 7 TCP/IP:1.3 WIFI无法连接解决方案。
3、myAGV通讯控制案例
小车正常开机连接显示屏与键鼠,以上步骤确保连接好,接下来就可以使用小车控制机械臂啦。
- myCobot 280:
from pymycobot import MyCobotSocket
# 默认使用9000端口
#其中"192.168.11.15"为机械臂IP,请自行输入你的机械臂IP
mc = MyCobotSocket("192.168.11.15",9000)
#连接正常就可以对机械臂进行控制操作
mc.send_angles([0,0,0,0,0,0],20)
res = mc.get_angles()
print(res)
...
- myPalletizer 260:
from pymycobot import MyPalletizerSocket
# 默认使用9000端口
#其中"192.168.11.15"为机械臂IP,请自行输入你的机械臂IP
mc = MyPalletizerSocket("192.168.11.15",9000)
#连接正常就可以对机械臂进行控制操作
mc.send_angles([0,0,0,0],20)
res = mc.get_angles()
print(res)
...
2.2 Pi 版本
2.2.1 WIFI 通讯控制
注: 只支持myCobot 280 Pi、myPalletizer 260 Pi、mechArm 270 Pi
1、配置机械臂
Step 1 首先机械臂连接显示屏开机,点击WIFI图标,连接WIFI,并输入WIFI密码,点击Connection,成功连接。
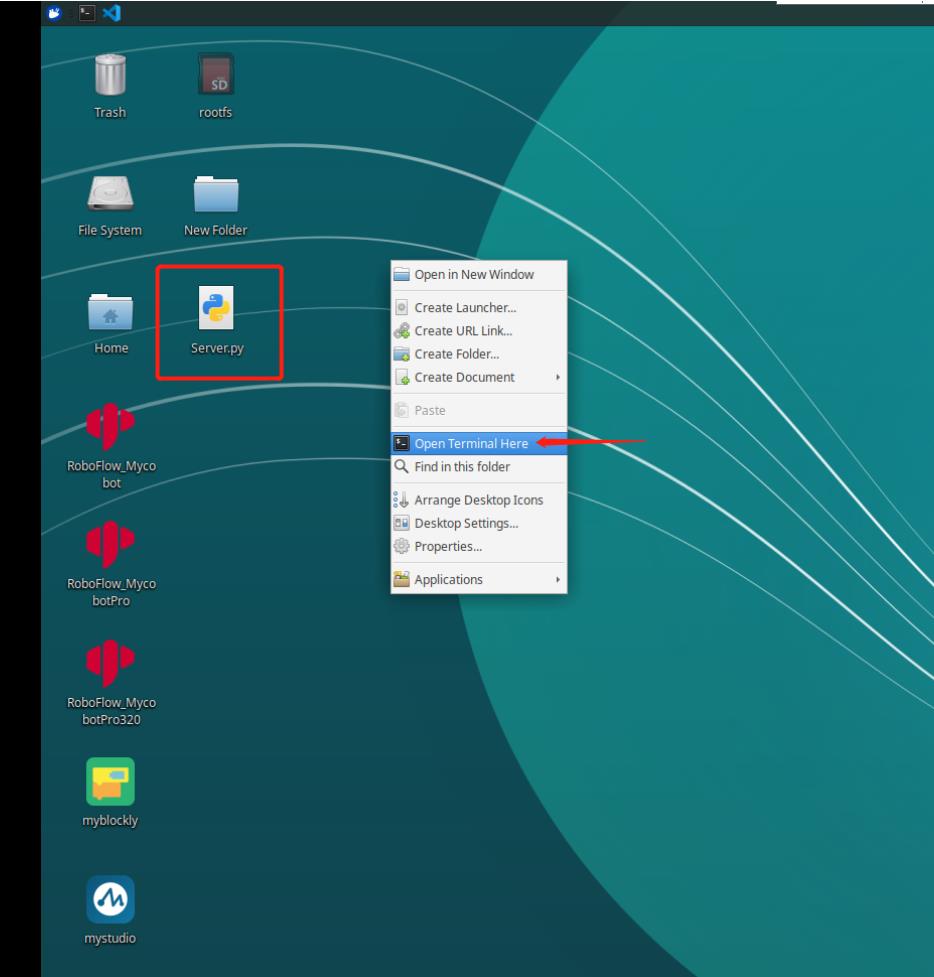
Step 2 点击桌面pymycobot文件,点击demo文件,把Server.py文件拷贝到桌面上。
Step 3 打开命令终端
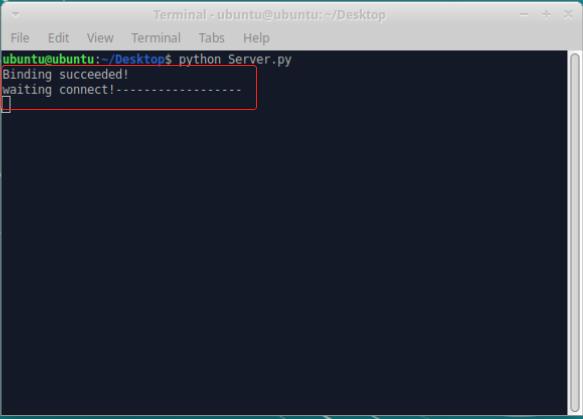
Step 4 输入以下代码运行脚本:
sudo python3 Server.py
Step 5 运行成功如图:
2、myAGV通讯控制案例
小车正常开机连接显示屏与键鼠,以上步骤确保连接好,接下来就可以使用小车控制机械臂啦。
注意:机械臂需要和小车在同一网段下,即同一WIFI下。
- myCobot 280、mechArm 270:
from pymycobot import MyCobotSocket
# 默认使用9000端口
#其中"192.168.10.22"为机械臂IP,请自行输入你的机械臂IP
mc = MyCobotSocket("192.168.10.22",9000)
mc.connect()
#连接正常就可以对机械臂进行控制操作
mc.send_angles([0,0,0,0,0,0],20)
res = mc.get_angles()
print(res)
...
- myPalletizer 260:
from pymycobot import MyPalletizerSocket
# 默认使用9000端口
#其中"192.168.10.22"为机械臂IP,请自行输入你的机械臂IP
mc = MyPalletizerSocket("192.168.10.22",9000)
mc.connect()
#连接正常就可以对机械臂进行控制操作
mc.send_angles([0,0,0,0],20)
res = mc.get_angles()
print(res)
...